







ODrive固件开发环境搭建
- 进入Python官网https://www.python.org/
 ,
,

下载Python安装包Python3.x.x。
 双击安装包图标安装,
双击安装包图标安装,

一定要勾选添加Python 3.9到环境变量,然后按照提示保持默认安装即可。
最后在Windows命令行窗口输入“Python”,回车出现以下内容,即安装成功。

成功安装Python后,打开新的Windows命令行窗口输入“pip install PyYAML Jinja2 jsonschema”安装需要的Python包。

2、安装Git for Windows
点击https://gitforwindows.org/,若无法连接,多尝试几次,进入下载页面点击Download
下载完后双击安装包图标 安装,按照提示保持默认安装即可。
安装,按照提示保持默认安装即可。
3、安装Vscode
点击https://code.visualstudio.com/,进入下载页面点击Download for Windows,

下载完成后双击安装包图标 安装,除如下步骤中需要勾选四个复选框外,其他步骤保持默认安装即可。
安装,除如下步骤中需要勾选四个复选框外,其他步骤保持默认安装即可。

接下来打开Vscode,安装Visual Studio Code扩展插件:C/C++、Cortex-Debug、Include Autocomplete、Path Autocomplete、Auto Comment Blocks。
插件安装示意,以安装“C/C++”扩展插件为例:

打开Vscode软件,点击“Extensions”图标;

在搜索框中输入“C/C++”,回车搜索,然后点击Install,安装插件,等待安装完成即可,其他插件安装和C/C++插件安装方式一致。
接下来,配置Visual Studio Code默认终端为git bash,

点击“设置”图标,点击“Settings”;

在设置搜索框中输入“terminal.integrated.shell.windows”然后点击“Edit in setting.json”;

将“terminal.integrated.shell.windows”:“”后边的双引号内填入Git\bin\bash.exe的路径,其中所有的“\”都要改成“\\”,我这里的Git\bin\bash.exe的路径为D:\ Program Files\Git\bin\bash.exe,实际操作中按你自己的安装路径为准,最后Ctrl+s保存Edit in setting.json后退出。

最后点击VScode软件界面上方“Terminal”标签,在下拉框中点击“New Terminal”,在VScode软件界面下方若出现上图所示命令行,则配置Visual Studio Code默认终端为git bash成功。
4、安装Tup
TUP是一个基于文件的Linux、OSX和Windows构建系统。它输入文件更改列表和有向无环图(DAG),然后处理DAG以执行更新依赖文件所需的适当命令。更新的执行开销很小,因为TUP实现了强大的构建算法,以避免做不必要的工作。这意味着您可以专注于您的项目,而不是您的构建系统。点击http://gittup.org/tup/index.html,进入下载页面点击“Download lasted version”下载。

下载压缩包完成后,解压tup-latest.zip到任意位置,然后将tup-latest地址添加到系统环境变量Path中即可。
5、安装GUN MCU Eclipse
GUN MCU Eclipse可以调用make编译工程代码。点击https://github.com/xpack-dev-tools/windows-build-tools-xpack/releases下载安装包,若点击网址无法下载,可复制网址到浏览器进行下载;

下载到压缩包后,解压xpack-windows-build-tools-4.2.1-2-win32-x64.zip到任意位置,然后添加xpack-windows-build-tools-4.2.1-2\bin到系统环境变量Path中即可;
6、安装GUN ARM Embedded Toolchain
GNU Arm嵌入式工具链是一个现成的,开放源代码的工具套件,用于C,C++和汇编编程。GNU Arm嵌入式工具链针对32位Arm Cortex-A,Arm Cortex-M和Arm Cortex-R处理器系列。GNU Arm嵌入式工具链包括GNU编译器(GCC),可直接从Arm免费获得,用于Windows,Linux和Mac OS X操作系统上的嵌入式软件开发。点击https://developer.arm.com/tools-and-software/open-source-software/developer-tools/gnu-toolchain/gnu-rm/downloads下载安装包;

下载gcc-arm-none-eabi-10-2020-q4-major-win32.zip;
解压gcc-arm-none-eabi-10-2020-q4-major-win32.zip到任意位置,然后将gcc-arm-none-eabi-10-2020-q4-major\bin 地址添加到系统环境变量 Path 中即可。
7、所有软件都安装配置好后,打开Odrive固件文件夹ODrive-fw-v0.5.1;

双击ODrive_Workspace.code-workspace,用VScode打开工作区。
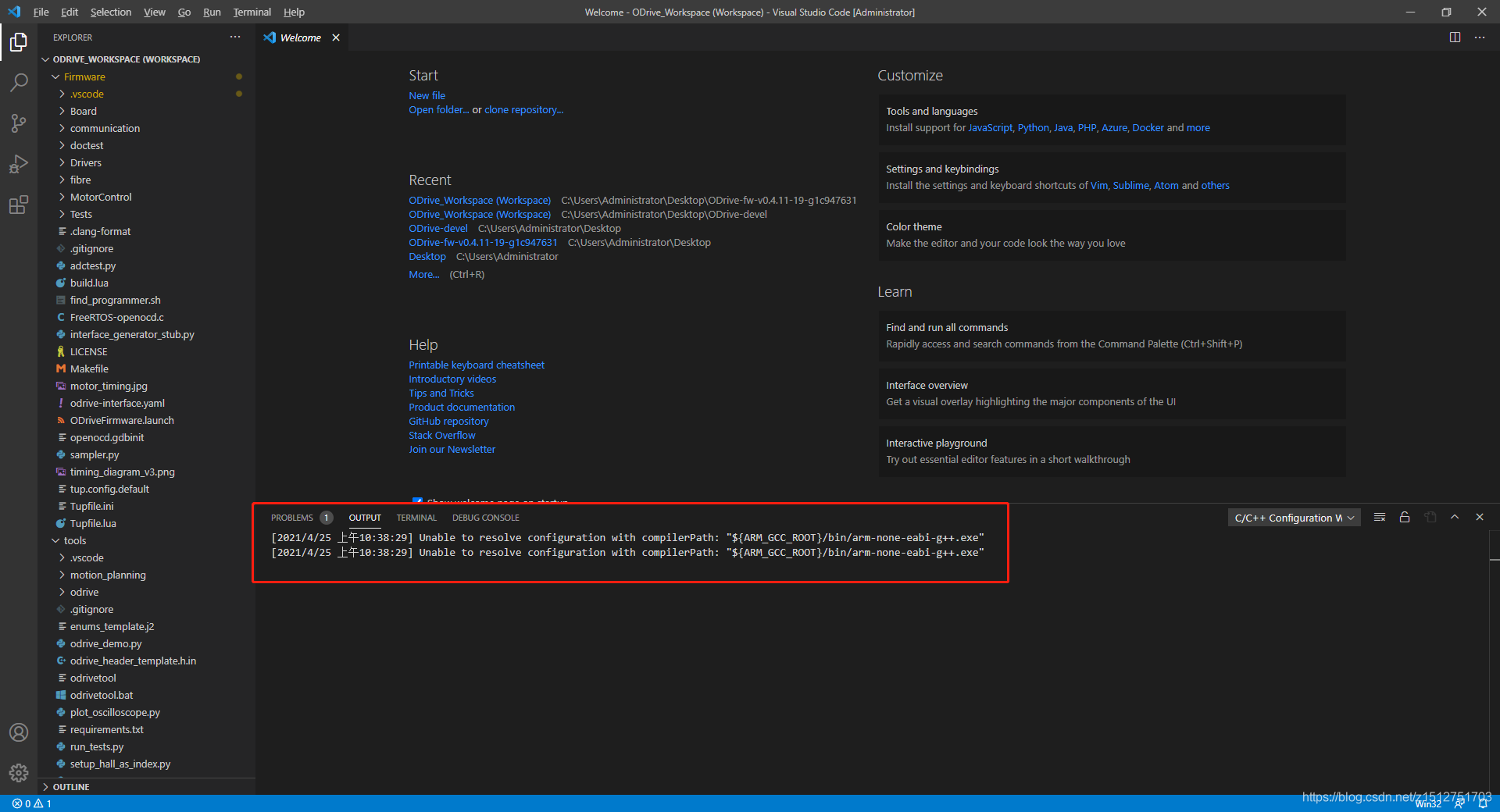
显示有两个这样的问题,需要新建一个变量名为ARM_GCC_ROOT,值为D:\Tools Program Files\gcc-arm-none-eabi-10-2020-q4-major(具体路径以实际软件解压地址为准)的系统环境变量,解决这个问题。

添加系统环境变量完成后,重新打开ODrive_Workspace.code-workspace,问题消失。
到此为止,软件环境搭建配置完成,系统环境变量Path中具体情况如下:

*******************************下面开始编译代码********************************

单击tup.config.default文件,配置硬件版本,修改为如下代码:
# Copy this file to tup.config and adapt it to your needs
# make sure this fits your board
CONFIG_BOARD_VERSION=v3.6-56V
CONFIG_USB_PROTOCOL=native
CONFIG_UART_PROTOCOL=ascii
CONFIG_DEBUG=false
CONFIG_DOCTEST=false
# Uncomment this to error on compilation warnings
#CONFIG_STRICT=true保存文件,然后将tup.config.default文件重命名为tup.config。
最后依次点击菜单中的 Terminal -> Run Build Task… 等待构建、编译完成,如下图所示,即编译成功。

最后用ST-LINK烧写固件,可以用STM32 ST-LINK Utility软件烧写OdriveFirmware.hex文件到Odrive,OdriveFirmware.hex文件生成在ODrive-fw-v0.5.1\Firmware\build目录下。
参考:
https://blog.csdn.net/qq_16001089/article/details/113798025
https://www.it610.com/article/1295777045862752256.htm
https://docs.odriverobotics.com/configuring-vscode.html
https://docs.odriverobotics.com/developer-guide















 506
506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









