







 本文详细介绍了如何解决Autoware中ray_ground_filter节点无点云输出的问题,主要原因是TF转换失败。通过修改查找TF的参数,如使用ros::Time(0)和增大超时时间,可以避免找不到TF的问题。同时,文章还分析了ray_ground_filter节点的代码,包括监听TF、裁剪高点云、消除近身反射点、角度和距离微分以及地面判断等步骤,这些都是激光雷达点云预处理的关键操作,旨在提取地面和障碍物信息。
本文详细介绍了如何解决Autoware中ray_ground_filter节点无点云输出的问题,主要原因是TF转换失败。通过修改查找TF的参数,如使用ros::Time(0)和增大超时时间,可以避免找不到TF的问题。同时,文章还分析了ray_ground_filter节点的代码,包括监听TF、裁剪高点云、消除近身反射点、角度和距离微分以及地面判断等步骤,这些都是激光雷达点云预处理的关键操作,旨在提取地面和障碍物信息。
文章目录
一、解决Autoware的ray_ground_filter节点无点云输出的问题
在autoware/core_perception/points_preprocessor/nodes/ray_ground_filter的包ray_ground_filter存在无点云输出的问题,下面解决它并具体分析一下ray_ground_filter的代码,参考:https://adamshan.blog.csdn.net/article/details/82901295#t6
(1)首先通过终端报错发现是tf的问题:
[ERROR] [1689559482.301474720]: Failed transform from base_link to velodyne
[ WARN] [1689559483.304340852]: Lookup would require extrapolation into the past. Requested time 1671007347.691825151 but the earliest data is at time 1689559474.270626140, when looking up transform from frame [velodyne] to frame [base_link]
报错的源码在这句:
transform_stamped = tf_buffer_.lookupTransform(in_target_frame, in_cloud_ptr->header.frame_id,in_cloud_ptr->header.stamp, ros::Duration(1.0));
它用的是in_cloud_ptr->header.stamp,就是说它寻找的tf关系是在我们接收输入点云的时刻比如时间为100的时刻的tf关系,但有时当我们寻找时间为100时的tf关系时已经找不到了,系统存储的tf关系已经被更新了,存储的最早的可能就只有103时刻的了,这时候就会报错或者抛出异常,对于transformPointCloud而言就是返回false,虽然合乎情理,但是我就想要他的tf变换,不是100时刻的也行,105时刻的也行,这时候我们就要用ros::Time(0)获取当前时刻tf,这样不会再找不到吧,ros::Duration(5.0)也可以设大点,让它能找到更多的时间范围。
transform_stamped = tf_buffer_.lookupTransform(in_target_frame, in_cloud_ptr->header.frame_id,ros::Time(0), ros::Duration(5.0));
成功解决:
另外注意调整其以下几个参数(下一节会具体描述):
clipping_height:去除高于底盘1.2米的点,原算法是去除高于雷达0.2米的点,但是Autoware利用TF将点云转换到base_link坐标系(为了省去代码中的雷达高度参数),因此这里是1.2(加上雷达高度1m);
min_point_distance:去除雷达2米范围内的点云;
radial_divider_angle:将雷达点云坐标转换到柱坐标,并对360度进行微分,每一份的角度为0.18度
concentric_divider_distanc:上面的角度微分一份近似的可以看作一条射线,在射线上根据水平距离再进行微分
general_max_slope,local_max_slope:全局和局部的最大坡度(角度)
min_point_distance:一条射线上两个相邻点的最小高度差
reclass_distance_threshold:重新分类时两个点的最小距离阈值

二、ray_ground_filter节点代码分析
过滤地面是激光雷达感知中一步基础的预处理操作,因为我们环境感知通常只对路面上的障碍物感兴趣,且地面的点对于障碍物聚类容易产生影响,所以在做Lidar Obstacle Detection(障碍物探测)之前通常将地面点和非地面点进行分离。
2.1.监听bask_link和velodyne之间的TF
作用是利用TF将点云转换到bask_link坐标系,这样就不需要原算法中的车身高度:
bool RayGroundFilter::TransformPointCloud(const std::string &in_target_frame,
const sensor_msgs::PointCloud2::ConstPtr &in_cloud_ptr,
const sensor_msgs::PointCloud2::Ptr &out_cloud_ptr)
{
if (in_target_frame == in_cloud_ptr->header.frame_id)
{
*out_cloud_ptr = *in_cloud_ptr;
return true;
}
geometry_msgs::TransformStamped transform_stamped;
try
{
// 监听开始了,但是坐标之间的变换关系还未处理完毕,在此期间访问tf便会出现不存在的报错
// 将函数的超时参数设定为5s,即最多有5s的时间让listener处理坐标关系
transform_stamped = tf_buffer_.lookupTransform(in_target_frame, in_cloud_ptr->header.frame_id,
ros::Time(0), ros::Duration(5.0));
// transform_stamped = tf_buffer_.lookupTransform(in_target_frame, in_cloud_ptr->header.frame_id,
// in_cloud_ptr->header.stamp, ros::Duration(5.0));
}
catch (tf2::TransformException &ex)
{
ROS_WARN("%s", ex.what());
return false;
}
// tf2::doTransform(*in_cloud_ptr, *out_cloud_ptr, transform_stamped);
Eigen::Matrix4f mat = tf2::transformToEigen(transform_stamped.transform).matrix().cast<float>();
pcl_ros::transformPointCloud(mat, *in_cloud_ptr, *out_cloud_ptr);
out_cloud_ptr->header.frame_id = in_target_frame;
return true;
}
2.2 裁切过高点云
在分割地面之前,可以滤除掉过高的非地面点,以减少点云的数量,提升整体的处理速率,而且过高的障碍物对于小车来说并不算障碍物。具体的裁切高度由clipping_height指定。在这里面我加了一句代码去掉NAN值,如果有NAN值可能造成错误:
void RayGroundFilter::ClipCloud(const pcl::PointCloud<pcl::PointXYZI>::Ptr in_cloud_ptr, const double in_clip_height,
pcl::PointCloud<pcl::PointXYZI>::Ptr out_clipped_cloud_ptr)
{
pcl::ExtractIndices<pcl::PointXYZI> extractor;
extractor.setInputCloud(in_cloud_ptr);
pcl::PointIndices indices;
// #pragma omp for语法OpenMP的并行化语法,即希望通过OpenMP并行化执行这条语句后的for循环,从而起到加速的效果。
#pragma omp for
for (size_t i = 0; i < in_cloud_ptr->points.size(); i++)
{
// 添加判断,去除空点
if (in_cloud_ptr->points[i].z > in_clip_height || isnan(in_cloud_ptr->points[i].x) || isnan(in_cloud_ptr->points[i].y) || isnan(in_cloud_ptr->points[i].z))
{
indices.indices.push_back(i);
}
}
extractor.setIndices(boost::make_shared<pcl::PointIndices>(indices));
extractor.setNegative(true); // true removes the indices, false leaves only the indices
extractor.filter(*out_clipped_cloud_ptr);
}
2.3 消除雷达近身反射点的影响
具体指标由min_point_distance参数指定。去除过近处区域雷达稀疏点云,避免车身点云的影响:
void RayGroundFilter::RemovePointsUpTo(const pcl::PointCloud<pcl::PointXYZI>::Ptr in_cloud_ptr, double in_min_distance,
pcl::PointCloud<pcl::PointXYZI>::Ptr out_filtered_cloud_ptr)
{
pcl::ExtractIndices<pcl::PointXYZI> extractor;
extractor.setInputCloud(in_cloud_ptr);
pcl::PointIndices indices;
#pragma omp for
for (size_t i = 0; i < in_cloud_ptr->points.size(); i++)
{
if (sqrt(in_cloud_ptr->points[i].x * in_cloud_ptr->points[i].x +
in_cloud_ptr->points[i].y * in_cloud_ptr->points[i].y) < in_min_distance)
{
indices.indices.push_back(i);
}
}
extractor.setIndices(boost::make_shared<pcl::PointIndices>(indices));
extractor.setNegative(true); // true removes the indices, false leaves only the indices
extractor.filter(*out_filtered_cloud_ptr);
}
2.4 角度和距离微分(转换到柱坐标)
Ray Ground Filter算法的核心是以射线(Ray)的形式来组织点云。我们现在将点云的 (x, y, z)三维空间降到(x,y)平面来看,计算每一个点到车辆x正方向的平面夹角 θ, 我们对360度进行微分,分成若干等份,每一份的角度为0.18度,这个微分的等份近似的可以看作一条射线,每条射线上的点又根据水平距离(点到lidar的水平距离,半径)0.001再进行微分。

为了方便地对点进行半径和夹角的表示,作者自定义了数据结构PointXYZIRTColor来代替pcl::PointCloudXYZI:
struct PointXYZIRTColor
{
pcl::PointXYZI point;
float radius; //xy平面与雷达的欧氏距离
float theta; //xy的角度微分
size_t radial_div; //线圈的索引
size_t concentric_div; //扫描线的索引
size_t original_index; //与源雷达点云对应的索引
};
用radial_div和concentric_div分别描述角度微分和距离微分。对点云进行水平角度微分之后,可得到:360/0.18 = 2000条射线,将这些射线中的点按照距离的远近进行排序:
void RayGroundFilter::ConvertXYZIToRTZColor(
const pcl::PointCloud<pcl::PointXYZI>::Ptr in_cloud,
const std::shared_ptr<PointCloudXYZIRTColor> &out_organized_points,
const std::shared_ptr<std::vector<pcl::PointIndices>> &out_radial_divided_indices,
const std::shared_ptr<std::vector<PointCloudXYZIRTColor>> &out_radial_ordered_clouds)
{
out_organized_points->resize(in_cloud->points.size());
out_radial_divided_indices->clear();
out_radial_divided_indices->resize(radial_dividers_num_);
out_radial_ordered_clouds->resize(radial_dividers_num_);
// 遍历当前帧的所有点
for (size_t i = 0; i < in_cloud->points.size(); i++)
{
PointXYZIRTColor new_point;
// 半径和方位角
auto radius = static_cast<float>(
sqrt(in_cloud->points[i].x * in_cloud->points[i].x + in_cloud->points[i].y * in_cloud->points[i].y));
auto theta = static_cast<float>(atan2(in_cloud->points[i].y, in_cloud->points[i].x) * 180 / M_PI);
if (theta < 0)
{
theta += 360;
}
if (theta >= 360)
{
theta -= 360;
}
// 角度的微分
auto radial_div = (size_t)floor(theta / radial_divider_angle_);
// 半径的微分
auto concentric_div = (size_t)floor(fabs(radius / concentric_divider_distance_));
new_point.point = in_cloud->points[i];
new_point.radius = radius;
new_point.theta = theta;
new_point.radial_div = radial_div;
new_point.concentric_div = concentric_div;
new_point.red = (size_t)colors_[new_point.radial_div % color_num_].val[0];
new_point.green = (size_t)colors_[new_point.radial_div % color_num_].val[1];
new_point.blue = (size_t)colors_[new_point.radial_div % color_num_].val[2];
new_point.original_index = i;
out_organized_points->at(i) = new_point;
// radial divisions更加角度的微分组织射线
out_radial_divided_indices->at(radial_div).indices.push_back(i);
// 每个角度/射线上包含的所有点云
out_radial_ordered_clouds->at(radial_div).push_back(new_point);
} // end for
// order radial points on each division
#pragma omp for
for (size_t i = 0; i < radial_dividers_num_; i++)
{
// 将同一根射线上的点按照半径(距离)排序
std::sort(out_radial_ordered_clouds->at(i).begin(), out_radial_ordered_clouds->at(i).end(),
[](const PointXYZIRTColor &a, const PointXYZIRTColor &b)
{ return a.radius < b.radius; }); // NOLINT
}
}
2.5 地面判断(核心部分)
通过判断射线中前后两点的坡度是否大于我们事先设定的坡度阈值,从而判断点是否为地面点:

void RayGroundFilter::ClassifyPointCloud(const std::vector<PointCloudXYZIRTColor> &in_radial_ordered_clouds,
const pcl::PointIndices::Ptr &out_ground_indices,
const pcl::PointIndices::Ptr &out_no_ground_indices)
{
out_ground_indices->indices.clear();
out_no_ground_indices->indices.clear();
#pragma omp for
for (size_t i = 0; i < in_radial_ordered_clouds.size(); i++) // sweep through each radial division
{
// 上一个点的半径以及高度
float prev_radius = 0.f;
float prev_height = 0.f;
// 上一个以及当前点是否为地面点
bool prev_ground = false;
bool current_ground = false;
// 遍历一条射线上的每一个点(上面已经按从近到远排序)
for (size_t j = 0; j < in_radial_ordered_clouds[i].size(); j++) // loop through each point in the radial div
{
// 与上一个点水平距离(第一个点是与雷达/base_link的距离)
float points_distance = in_radial_ordered_clouds[i][j].radius - prev_radius;
// 通过这两个坡度阈值以及当前点的半径(到lidar的水平距离)求得高度阈值,
// 通过判断当前点的高度(即点的z值)是否在地面加减高度阈值范围内来判断当前点是为地面。
float height_threshold = tan(DEG2RAD(local_max_slope_)) * points_distance;
float current_height = in_radial_ordered_clouds[i][j].point.z;
float general_height_threshold = tan(DEG2RAD(general_max_slope_)) * in_radial_ordered_clouds[i][j].radius;
// for points which are very close causing the height threshold to be tiny, set a minimum value
// 对于前后两点水平距离较近导致高度阈值较小的点,设置一个阈值最小值
if (points_distance > concentric_divider_distance_ && height_threshold < min_height_threshold_)
{
height_threshold = min_height_threshold_;
}
// check current point height against the LOCAL threshold (previous point)
// 在上一个点的高度+/-算出来的局部高度差的高度范围内
if (current_height <= (prev_height + height_threshold) && current_height >= (prev_height - height_threshold))
{
// Check again using general geometry (radius from origin) if previous points wasn't ground
if (!prev_ground)
{
// 在雷达所在地面的高度+/-算出来的全局高度差的高度范围内
if (current_height <= general_height_threshold && current_height >= -general_height_threshold)
{
current_ground = true;
}
else
{
current_ground = false;
}
}
else
{
// 上一个是地面点,当前直接也是
current_ground = true;
}
}
else
{
// check if previous point is too far from previous one, if so classify again
// 检查是否与前一个点距离太远,若是则再次分类
if (points_distance > reclass_distance_threshold_ &&
(current_height <= height_threshold && current_height >= -height_threshold))
{
current_ground = true;
}
else
{
current_ground = false;
}
}
if (current_ground)
{
// 记录在原始点云中的索引
out_ground_indices->indices.push_back(in_radial_ordered_clouds[i][j].original_index);
prev_ground = true;
}
else
{
out_no_ground_indices->indices.push_back(in_radial_ordered_clouds[i][j].original_index);
prev_ground = false;
}
prev_radius = in_radial_ordered_clouds[i][j].radius;
prev_height = in_radial_ordered_clouds[i][j].point.z;
}
}
}
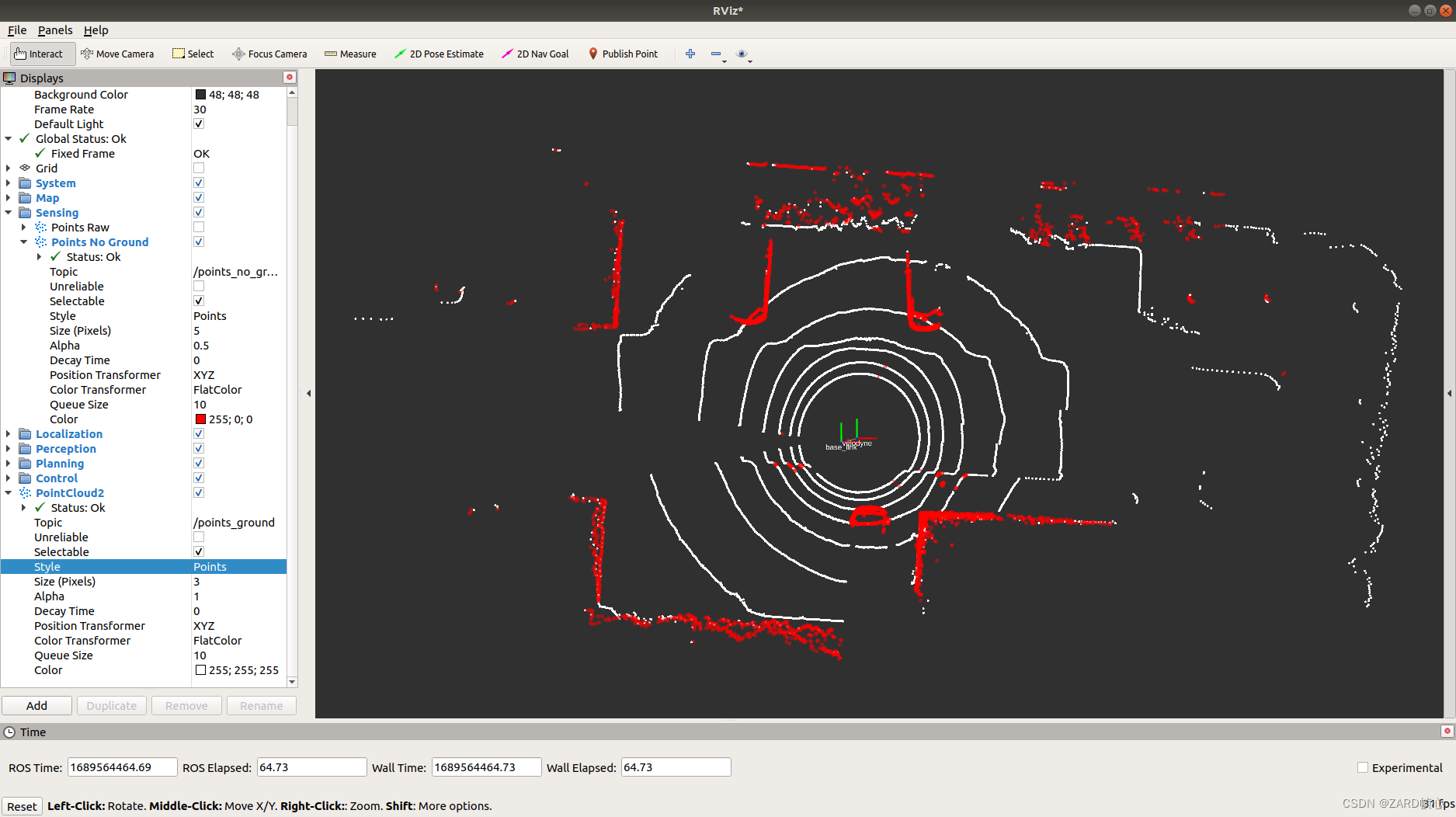
这里有两个重要参数,一个是local_max_slope_,是我们设定的同条射线上邻近两点的坡度阈值,一个是general_max_slope_,表示整个地面的坡度阈值,这两个坡度阈值的单位为度(degree),我们通过这两个坡度阈值以及当前点的半径(到lidar的水平距离)求得高度阈值,通过判断当前点的高度(即点的z值)是否在地面加减高度阈值范围内来判断当前点是为地面。效果如下图所示(白色的是地面点,红色的是障碍物):


















 1186
1186

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











