







 个人做实验时move_base的调参记录。
个人做实验时move_base的调参记录。
个人做实验时move_base的调参记录
文章目录
local_costmap_params.yaml
1、width: height:
width和height代表了小车的探测范围,
- 如果将这两个数值调小,小车会基本沿着全局规划路径走,而且走得比较稳,速度也相对更慢,
- 如果将数值调大,则由于前边设置权重的原因,小车会变得畏手畏脚,停滞不前,选择合理参数利于缩短用时。
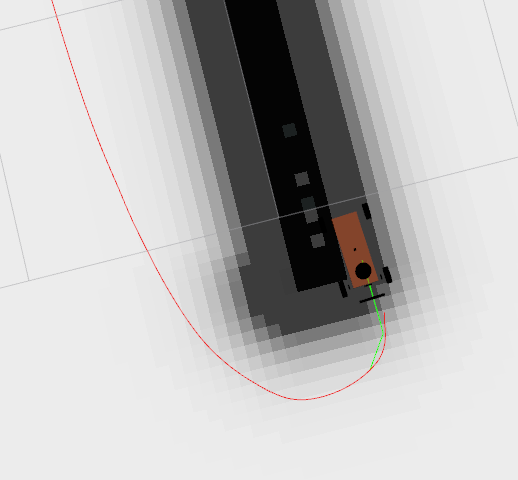
width: 1
height: 1
容易发生碰撞,原地转圈,局部路径和全局路径高度重合,缺少灵活性
width: 5
height: 5
局部路线和全局路线在直线时基本重合,但是小车转弯时局部路径经常穿墙,耗时
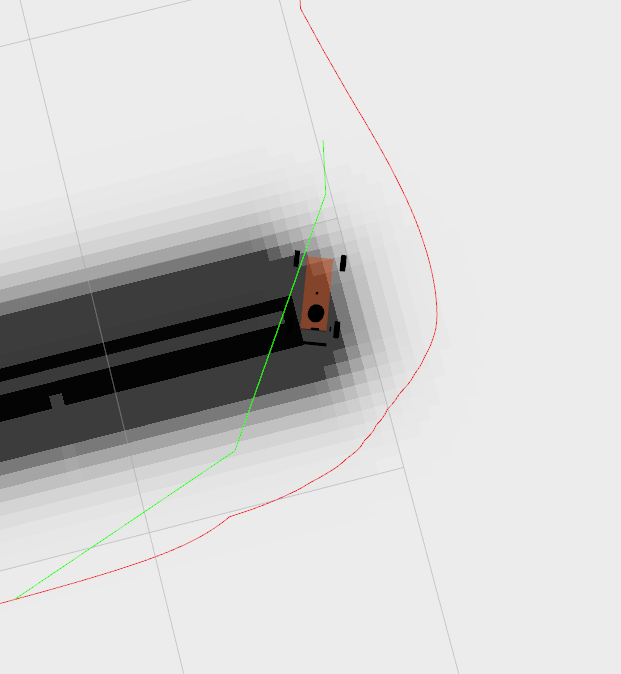

width: 15
height: 15
在小车需要转弯时,局部路径更贴合小车行使轨迹&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 4437
4437











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











