










 本文详细描述了EcuM如何在RUN状态下轮询唤醒事件,以及CANcontroller和CANtransceiver的状态控制过程。重点介绍了唤醒事件的校验机制,包括超时时间和状态转换。AUTOSAR4.0R3版本引入了接收CanNM报文校验的新配置选项。
本文详细描述了EcuM如何在RUN状态下轮询唤醒事件,以及CANcontroller和CANtransceiver的状态控制过程。重点介绍了唤醒事件的校验机制,包括超时时间和状态转换。AUTOSAR4.0R3版本引入了接收CanNM报文校验的新配置选项。
前提条件:EcuM运行在RUN状态,CAN channel在sleep状态并且可以检测唤醒事件。
canif控制can driver和can transceiver的状态,CanIf_SetControllerMode()控制CAN controller的状态,CanIf_SetTrcvMode()控制CAN transceiver的状态。
唤醒事件:can controller或can transceiver
1、EcuM周期轮询唤醒事件,当有唤醒事件发生时,通过中断触发执行EcuM_CheckWakeup()函数,该函数会调用CanIf_CheckWakeup(),CanIf_CheckWakeup()通过传递的唤醒源(传递的参数)来决定调用Can_CheckWakeup或者CanTrcv_CheckWakeup。
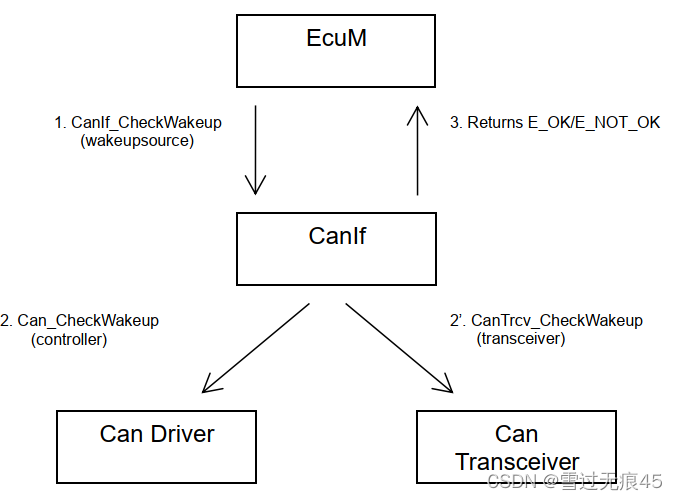
如果参数“CanIfPublicWakeupCheckValidSupport”是使能的,则要对唤醒源进行校验,执行下述步骤。
2、在调用EcuM_CheckWakeup()之后,会再调用EcuM_SetWakeupEvent(),同时启动校验超时计时器。
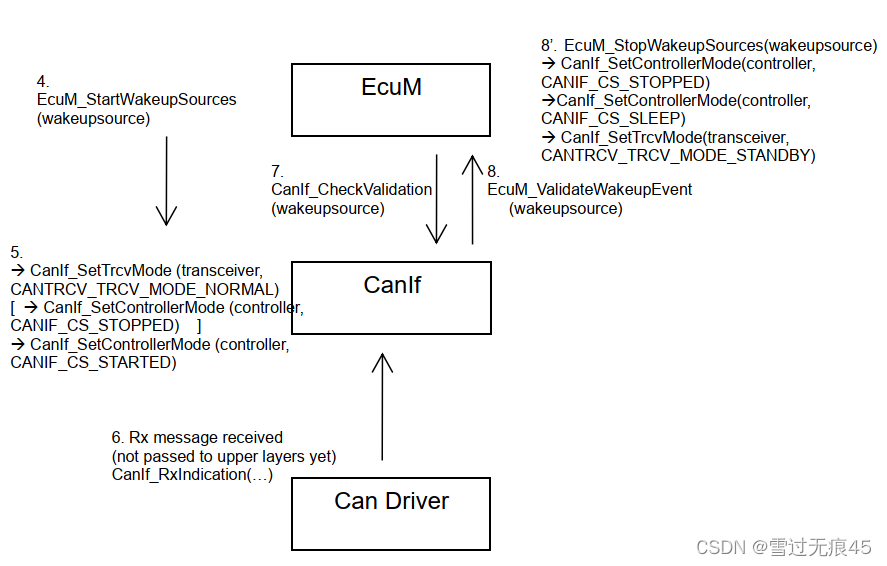
3、EcuM_MainFunction()是由SCHM触发的。EcuM检测到有挂起的唤醒事件时会调用EcuM_StartWakeupSources()。然后EcuM_StartWakeupSources()调用CanSM_StartWakeupSources(),从而通知CanSM模块EcuM收到了要进行校验的唤醒事件,同时CanSM通过CanIf将CanTrcv和CanDrv模式设置为所需状态(可以进行唤醒校验的状态)。但是此时这些报文不会传递到上层,因为PDU的模式仍为OFFLINE。
如果唤醒事件是由CAN controller初始化的,则相应的CAN transceiver必须设置为NORMAL模式,CAN controller必须设置为STARTED模式。
如果唤醒事件是由CAN transceiver初始化的,CAN controller必须内部唤醒。这意味着controller在转换为STARTED之前,必须调用
CanIf_SetControllerMode()先将模式设置为STOPPED以唤醒CAN controller。
4、EcuM通过调用EcuM_CheckValidation()启动唤醒校验,这意味着如果在超时时间内收到报文,EcuM会调用CanIf_CheckValidation()来产生成功校验的结果。CanIf检查最近在唤醒后发生的Rx事件,并通过调用EcuM_ValidationWakeupEvent()通知EcuM,并在该线程中调用ComM_EcuM_WakeUpIndication()从而通知ComM一个有效的唤醒事件,ComM存储该事件并启动相应通道,通过调用CanSM将相应CAN通道切换为FULLCOM,并将CanTrcv和CanDrv分别设置为NORMAL和STARTED状态,此时NM进入被动状态(passive),然后EcuM停止校验超时计时器。如果在调用CanIf_CheckValidation()之后没有收到报文,则不会通知“唤醒校验”成功,EcuM将进入超时。此时,EcuM会调用 EcuM_StopWakeupSources(),然后EcuM_StopWakeupSources()调用CanSM_StopWakeupSources(),从而通知CanSM模块“在超时时间内唤醒经校验是无效的”,同时CanSM通过调用CanIf模块将CAN driver和CAN transceiver设置为SLEEP模式或者开始新的一轮唤醒。
在唤醒和切换为SLEEP模式期间,上层必须关注影响CAN controller和CAN transceiver driver的状态转换序列。
在AUTOSAR4.0R3版本开始,可以配置是否只有在收到CanNM报文时才进行校验。


















 360
360

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









