









ROS Robotics Projects(4)物体检测与识别
这是本书的第6章,包括使用单目和深度视觉,分别为2D和3D的检测和识别。
用到了一些Github上已有的库和功能包。
以find_object_2d为例(http://wiki.ros.org/find_object_2d):
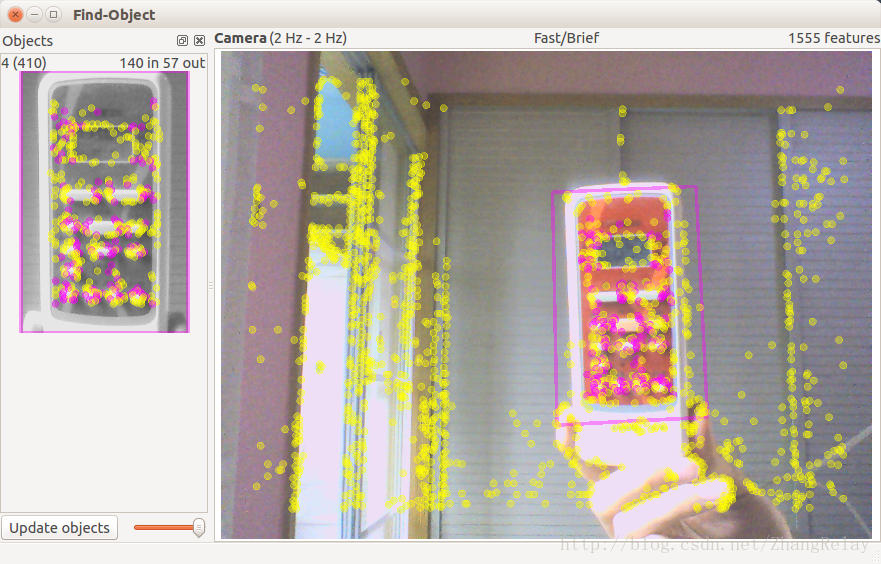
补充参考:https://github.com/introlab/find-object
| find_object_2d.launch | 2 years ago | ||
| find_object_2d_gui.launch | 2 years ago | ||
| find_object_3d.launch | 2 years ago | ||
| find_object_3d_kinect2.launch | 2 years ago |
----
3D物体识别(https://github.com/wg-perception)
ROS包:
~$ sudo apt-get install ros-indigo-object-
ros-indigo-object-msgs
ros-indigo-object-msgs-tools
ros-indigo-object-recognition-capture
ros-indigo-object-recognition-core
ros-indigo-object-recognition-linemod
ros-indigo-object-recognition-msgs
ros-indigo-object-recognition-reconstruction
ros-indigo-object-recognition-renderer
ros-indigo-object-recognition-ros
ros-indigo-object-recognition-ros-visualization
ros-indigo-object-recognition-tabletop
ros-indigo-object-recognition-tod
ros-indigo-object-recognition-transparent-objects
----
两个重要的功能包: find_object_2d+object_recognition。















 451
451











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











