







 本文介绍了3D空间中射线与轴向包围盒(AABB)的交叉检测算法,重点讲述了“Slabs method”算法的原理和实现。通过确定候选面并求解t值,判断射线与AABB盒的交叉情况,提高游戏中的碰撞检测效率。文中提供代码实例和解释,帮助读者理解这一关键的3D游戏开发技术。
本文介绍了3D空间中射线与轴向包围盒(AABB)的交叉检测算法,重点讲述了“Slabs method”算法的原理和实现。通过确定候选面并求解t值,判断射线与AABB盒的交叉情况,提高游戏中的碰撞检测效率。文中提供代码实例和解释,帮助读者理解这一关键的3D游戏开发技术。
引言
在上一节中,我讲述了如何实现射线与三角形的交叉检测算法。但是,我们应该知道,在游戏开发中,一个模型有很多的三角形构成,如果要对所有的物体,所有的三角形进行这种检测,就算现在的计算机运算能力,也是无法高效的完成。所以,我们需要通过其他的手段来提早剔除一些不可能发生交叉的物体,这种早退的思想,大量的运用在3D游戏技术中。在本篇文章中,我将像大家讲述如何实现射线与轴向包围盒AABB的交叉检测。如果读者不明白什么是轴向包围盒,请看这篇文章。
Ray-AABB交叉检测算法
现如今,有很多的Ray-AABB交叉检测算法,这里主要讲述一种称之为"Slabs method"的交叉检测算法。
在3D空间中,我们先确定正对着射线的三个面,也就是说,我们可以通过某种方式将AABB相对于射线Ray的背面给忽略掉,从而确定三个候选的面。这三个候选的面,就是有可能和射线Ray发生交叉的最近的面。同时,我们还需要知道一个事实:当射线与这三个候选面中的一个发生交叉之后,射线Ray的原点到这个面的距离要比到其他几个面的距离要长。
如果对于上面的事实不是很清楚的话,我们来看下图:
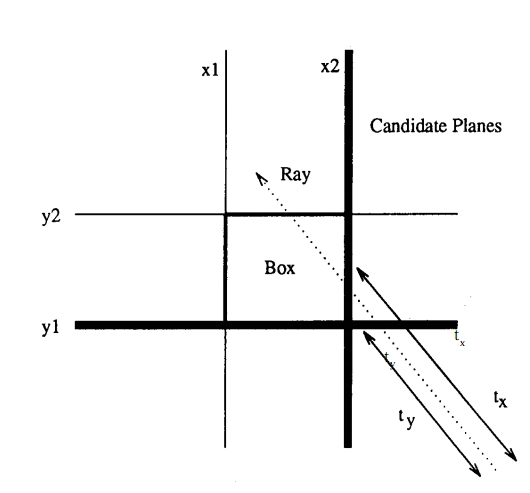
在上图中,我们的射线在右下角,向左上角发射。所以,候选面就是y1面,和x2面(这里由于讲述的方便,使用2D图形来表示)。ty是射线到y1面的距离,tx是射线到x2的距离。从上图中可以看出tx > ty, 而射线与x2平面相交叉。
通过上图,大家就应该明白了,上面那个事实的含义了。这个算法也就是基于此等事实来实现的。
我们知道射线的公式为R(t) = O + t * D,上图中所说的射线到某个面的距离,实际上就是射线原点到射线与该平面的交叉点的距离,而这个距离,刚好就是我们将平面方程带入R(t) = O + t * D中,计算出来的t的值。所以,我们现在要做的就是确定哪几个面试候选面,并且将候选面的方程带入到R(t) = O + t * D中,求出t的值,同时我们还要确保求出的交叉点在AABB盒上,才能够算作
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1346
1346

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









