







 本文介绍了如何在不喜欢使用vim或emacs的情况下,利用Eclipse的图形界面编译ROS项目。首先,通过roscreate-pkg创建项目并使用catkin_make生成Eclipse兼容的Makefile。接着,确保Eclipse已安装CDT,然后导入项目并配置编译路径。遇到模块导入错误时,需添加PYTHONPATH环境变量。完成这些步骤后,Eclipse就配置好了,可以尝试构建项目。
本文介绍了如何在不喜欢使用vim或emacs的情况下,利用Eclipse的图形界面编译ROS项目。首先,通过roscreate-pkg创建项目并使用catkin_make生成Eclipse兼容的Makefile。接着,确保Eclipse已安装CDT,然后导入项目并配置编译路径。遇到模块导入错误时,需添加PYTHONPATH环境变量。完成这些步骤后,Eclipse就配置好了,可以尝试构建项目。
好了,理解了系统各个组件的含义后,还是直接进入程序真刀真枪的从实践中学习吧!
不过首先呢,公欲善其事必先利其器,如果你向我一样不是vim和emacs的粉丝,喜欢eclipse的图形界面的话,这篇文章就是为你准备的。
第一步:
首先确保你的项目是通过roscreate-pkg创建的
假设你的ROS项目目录为catkin_ws,进入catkin_ws,执行下列命令。为你的项目生成Eclipse可以识别的Makefile
catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles"
第二步:
请确保你的Eclipse已经安装了CDT。
第三步:
现在你已经在Eclipse C/C++项目中有了catkin_ws该项目了。
File > New > Project
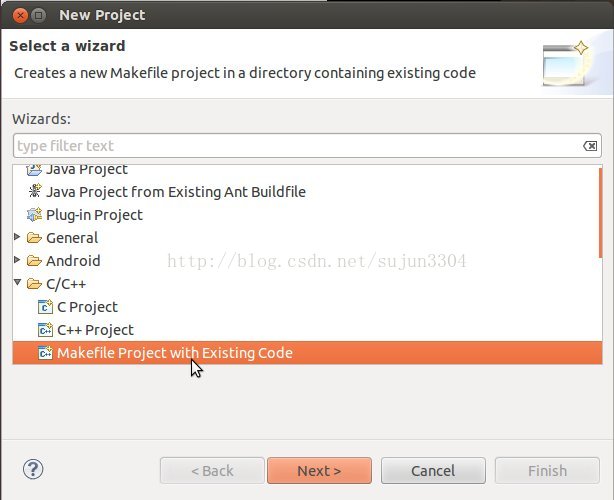
选择需要import的项目
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1953
1953

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









