







<script src="http://widgets.amung.us/classic.js" type="text/javascript"></script> <script type="text/javascript"> </script>
基于B-Spline的刚体运动
2009-09-02
之前我有一篇文章介绍了关于Bezier曲线和刚体运动的一些方面,现在再来介绍一下关于B-Spline曲线和刚体运动的一些东西。但不管是基于Bezier曲线的刚体运动还是基于B-Spline曲线的刚体运动,它们的核心都是一样的,都是要用一条轨迹曲线和一条方向曲线上的点,然后构成刚体变换矩阵M。顾名思义,轨迹曲线上的点决定了刚体的位置,方向曲线上的点决定了刚体的朝向。
对刚体运动不了解的话,可以参考我的一篇文章 Motion Analysis HTR,这篇文章对刚体运动有详细的描述。现在主要讲一下如何把B-Spline曲线和刚体运动关联起来,以及如何应用到OpenGL中来。先来看看曲线的定义,B-Spline曲线定义为
其中,n为最后一个控制点的索引,如果有5个控制点,最后一个索引就是4。为p次第i项B-Spline曲线基函数,
为第i个控制点。对B-Spline曲线不了解的话,可以参考我的另一篇文章,Intorduction to B-Spline Curve,这篇文章对B-Spline进行了详细的介绍。当然在实际应用中,很多时候需要Nurbs,(Non-Uniform Rational B-Spline),Nurbs没有什么神秘的地方,它也是B-Spline,只不过是knot间隔不相等的有理B-Spline。关于有理B-Spline这里只给出公式
上式中的w为权重值。
下面来看看在程序中的应用,这里以OpenGL为例。要画出一条曲线,首先要建立一条曲线。我们可以编写一个曲线类,比如叫做Nurbs_Curve,代码如下。
上面代码中,GVector是一个向量内,GVector(4,…)表示向量是4维向量,后面的参数就是对应的每一个分量。定义了曲线后,要画出这条曲线,就要得到曲线上的点。由曲线的方程我们知道,在knot区间上的每一个参数u都对应 一个曲线上的点,一般地,u在0和1之间。有了曲线上的点,在OpenGL中用线连接起来就可以了。
上面代码中,使用GL_LINE_STRIP是为了让每个点都可以用线连接起来,循环中100表示计算曲线上100个点。
double u = curve.min_of_domain + (curve.max_of_domain-curve.min_of_domain)*i/99;这句代码保证参数在曲线的knot区间之内。 max_of_domain和 min_of_domain分别表示曲线knot区间的最大值和最小值。而 Point_On_Curve()是曲线内的一个成员函数,参数u是个double型的变量,它返回一个向量值,表示曲线上的点,现在就可以把这些曲线上的点连接起来。
下面来看看如何应用刚体运动。首先刚体运动是用矩阵乘法来实现的,所以我们要有矩阵类提
供基本的矩阵操作。如果矩阵类为GMatrix的话,在程序中就要申明一个全局的矩阵M作为刚
体变换矩阵,然后分别计算出位移变换矩阵T和旋转矩阵R,那么利用M=TR就可以求出这个
刚体变换矩阵了。先来看看只有位移没有旋转的情况。那么
这个全局变量M就实时保存了每一时刻的曲线上的位置。我们可以把这个计算变换矩阵M的过程放到一个单独的函数中完成。
代码中,首先用一个静态变量t来作为曲线的参数u,所以要保证这个t在曲线的knot的区间之内。
然后用向量v来保存曲线上的点,把v的分量v[0],v[1],v[2]对应的x,y,z,作为矩阵的元素传入位移变换矩阵T,然后将T赋值给全局的刚体变换矩阵M。这里要注意的是,矩阵元素存放的方法和我们计算的时候不一样,这里恰好是将我们计算用的矩阵转置了一下。这是OpenGL中矩阵的结构决定的。有了变换矩阵了,如何应用它到OpenGL中呢?要在OpenGL中使用自己定义的矩阵,就不能使用OpenGL自带的glTranslatef()函数,而要使用glMultMatrixd()函数。这个函数有个参数,double型的指针。这个指针要指向我们的变换矩阵的元素数组的首地址。
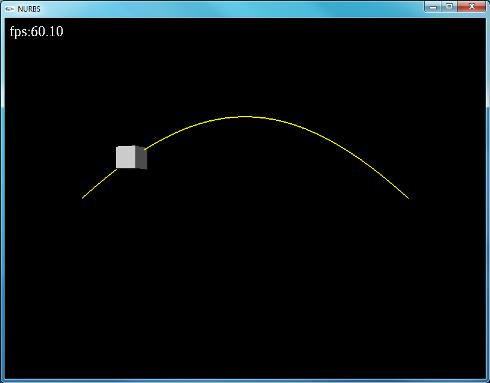
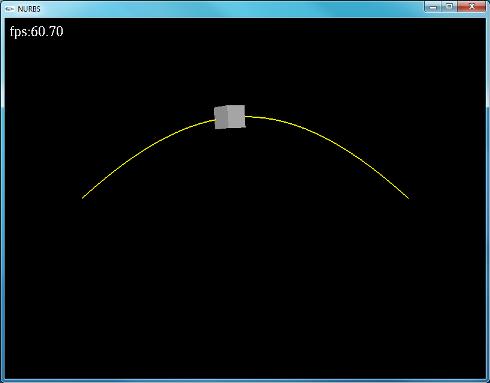
代码中用m保存了从变换矩阵中返回的元素数组的地址。form_arr()这个函数可以编写为GMatrix类的友元函数,然后使用它返回GMatrix中的数组地址。有了上面的操作,我们就可以看到刚体沿着我们设计好的曲线运动。
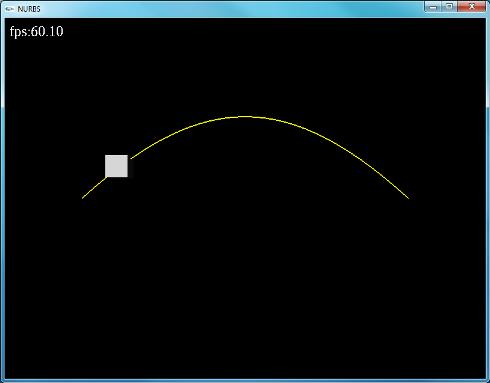
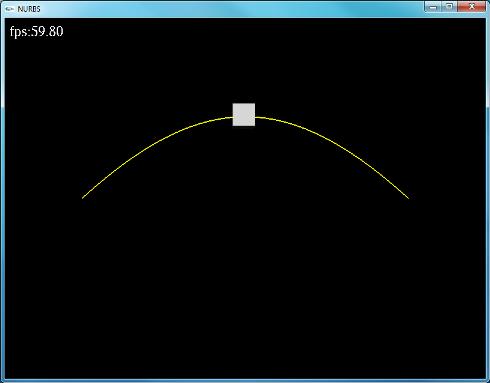
上面就是在3个不同u时刻的截图,可以看到刚体的运动轨迹就是我们设计好的曲线。
现在来看看如何定义方向曲线和怎样应用方向曲线。如果是平面上的曲线,那么控制点是二维的。如果是空间上的曲线,那么控制点是三维的。当然控制点也可以是四维的。如果我们把这个四维向量看作为四元数的话,那么这个曲线就是方向曲线。因为单位四元数可以表示围绕任意轴的旋转。不明白什么是四元数的话,请参考其他计算机图形数的书籍。这里只给出围绕(x,y,z)轴旋转的四元数:
这样,我们在定义曲线控制点的时候,就要给出这样的四元数。所以我们要有一个四元数的类,这里为GQuater。
上面的代码中首先定义了四个四元数,分别表示绕x轴旋转0度,绕y轴旋转45度,绕y轴旋转90度和绕z轴旋转90度。然后把这些表示旋转的四元数用向量表示出来, form_vec()这个方法就是把四元数表示为向量,然后存放在数组R中,把R作为曲线的控制点传入曲线。这里的U和轨迹曲线的U参数是一样的。
现在方向曲线也有了,同样的道理可以得到方向曲线上的点来表示刚体的旋转。还有点要注意,方向曲线上的点是用向量表示的,但是我们的刚体变换矩阵M是用矩阵的乘法来实现的。所以这里要把这个向量转化为矩阵。要把方向向量表示为矩阵,首先要把它表示回四元数的形式。然后再把这个四元数表示为矩阵。四元数表示为矩阵比较复杂,这里只给出公式,要注意的是,四元数必须是单位四元数。
有了这个旋转矩阵,我们就可以通过M=TR来计算变换矩阵了。现在只要在Motion函数中添加旋转矩阵就可以了。
代码中M=R*T,这也是因为OpenGL矩阵结构的原因。注意矩阵不满足交换律的,RT和TR的结果是不一样的。
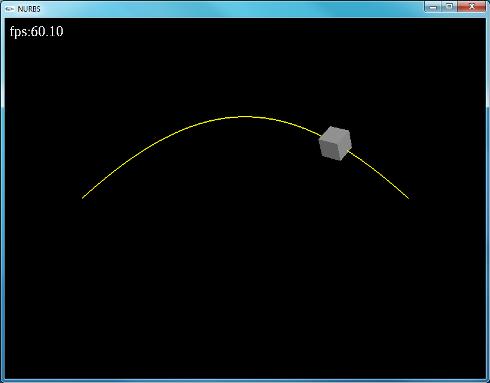
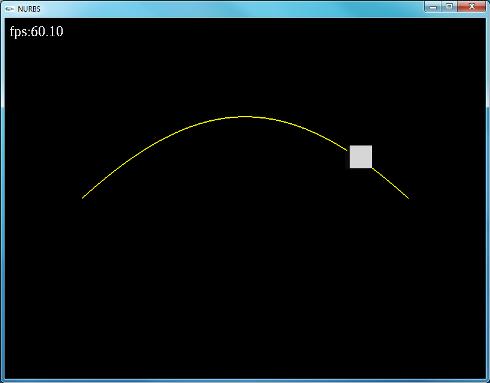
现在看看运行效果,可以明显看到不同位置的刚体方向也发生了变化。
这就是B-Spline和刚体运动的结合。对于曲线,不止这么简单。如果要做一个完整刚体曲线运动设计程序的话,还要涉及到曲线的一些基本算法,比如knot insertion, knot removing,knot refinement,control point reposition等等。有兴趣的朋友可以参看《The NURBS》这本书。
*原创文章,转载请注明出处*
















 8973
8973

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











