






接着上次继续:
1、第一个结论——电流环开环传递函数是典型一阶系统
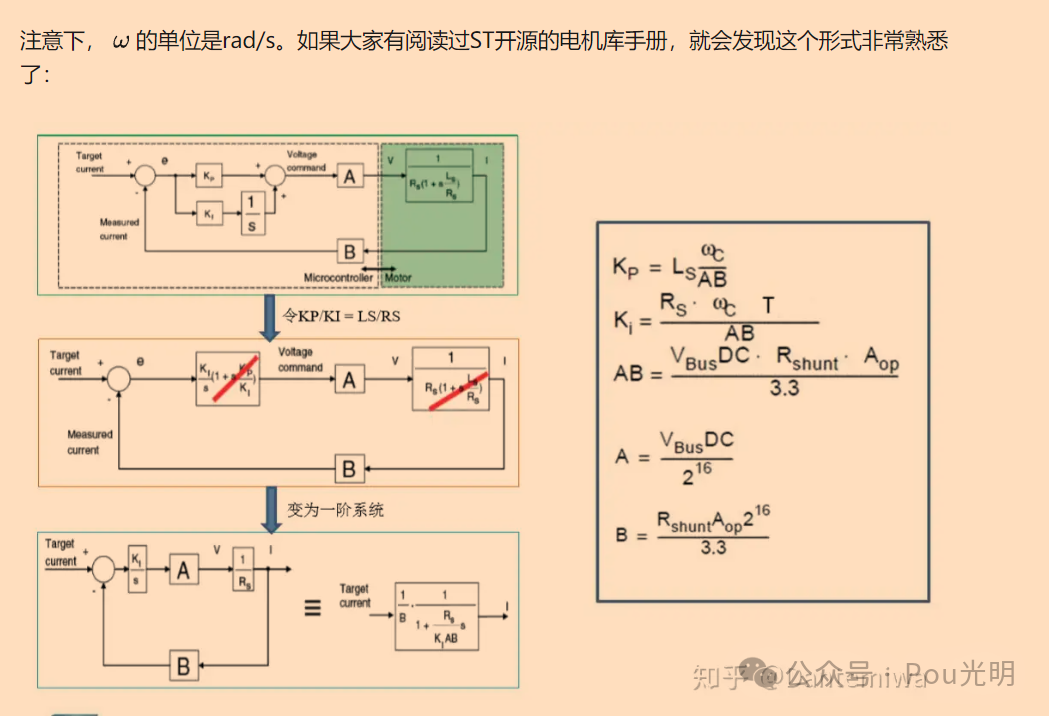
现在我们大概了解到d,q轴的某一单轴电流环控制流程:PI控制器、延迟环节(逆变器和cpu周期)、电机环节,
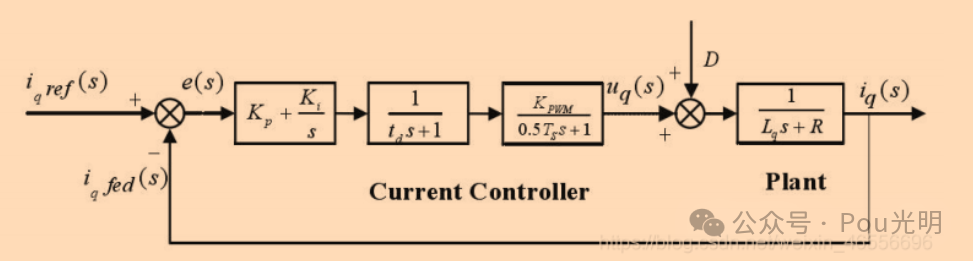
图3-1
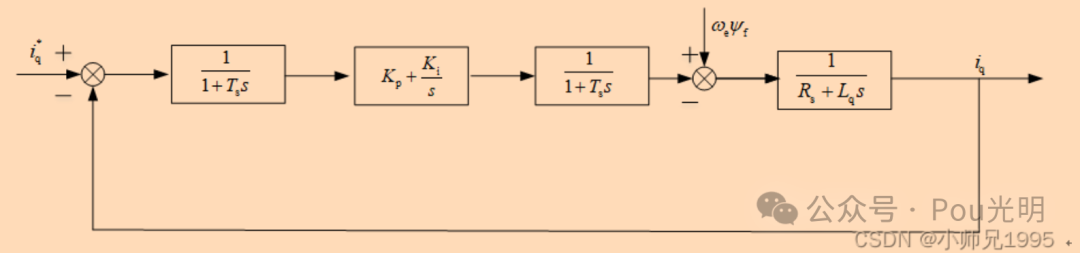
图3-2
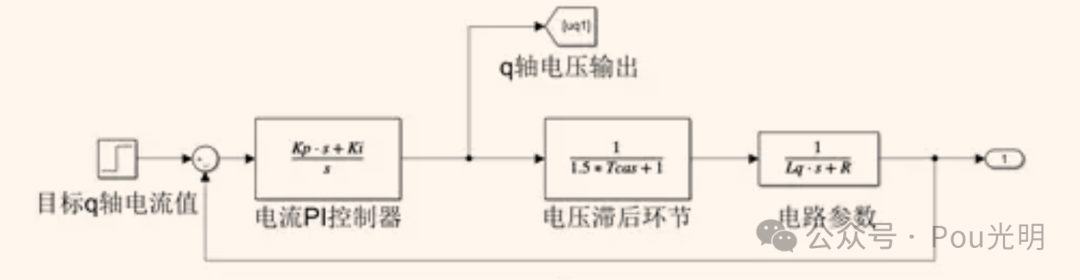
图3-3
对于图3-3,连续系统下的,q轴电流环开环传递函数可表示为:

其中 𝐾𝑝,𝐾𝑖 为电流环PI控制器参数,R,L 为对应d轴或q轴上的电阻和电感, 𝑇𝑐𝑎 为逆变器开关频率,同时也是电流环的控制周期。时间常数为1.5𝑇𝑐𝑎的一阶惯性环节来源如下: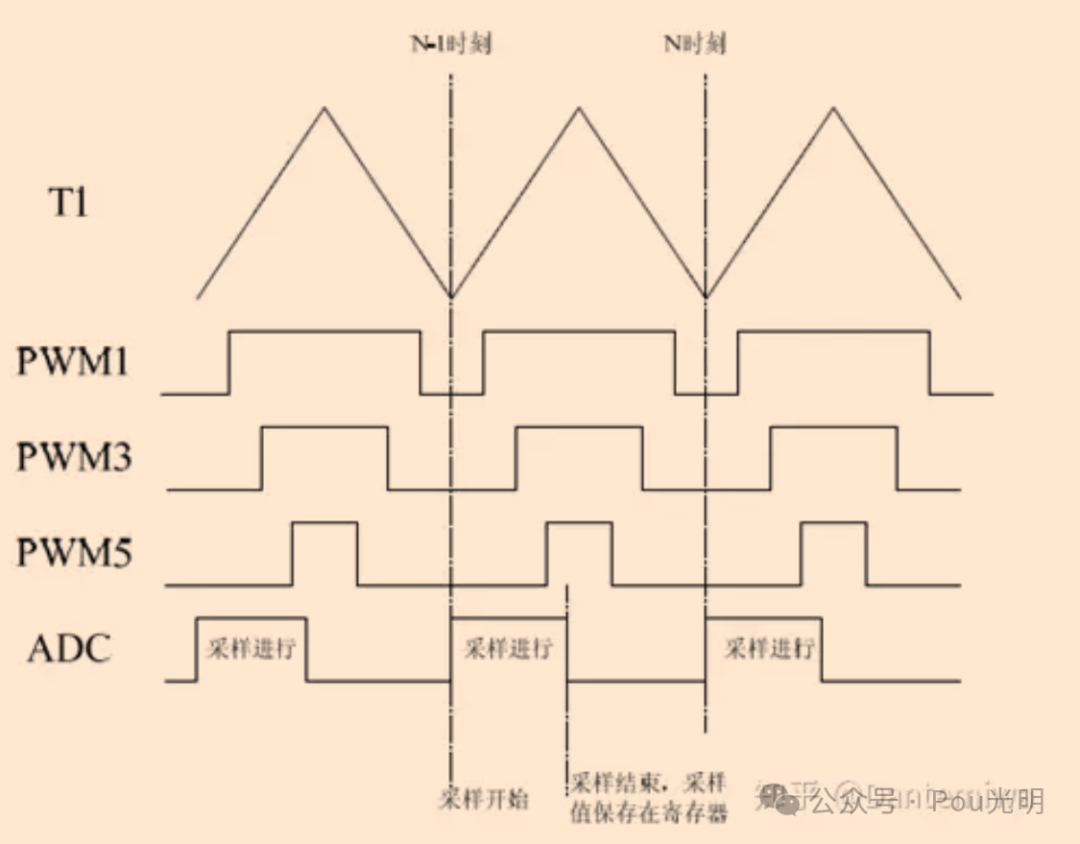
根据上图,由于电流的采样和计算都在开关周期的中间时刻进行,加上SVPWM调制出的空间磁矢量需要再花一个开关周期进行作用,因此整个逆变过程至少需要1.5个开关周期才能作用完毕,即存在着 1.5𝑇𝑐𝑎 的滞后,在传递函数中用一阶惯性环节表示。
变形后则: 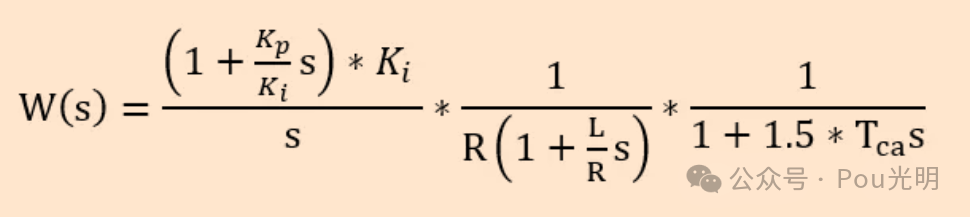
到这,我还能勉勉强强跟得上,下面这个,直接破防了:
令 𝐾𝑝/𝐾𝑖=𝐿/𝑅=Ti ,则传递函数可变为(学过自控的都应该知道吧,Ki=KP/Ti,Ti是时间参数,即Ti=Lq/R):
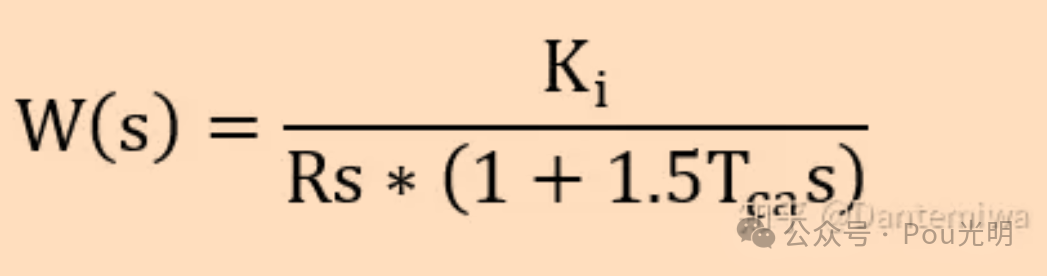
式3-1
GPT报道: 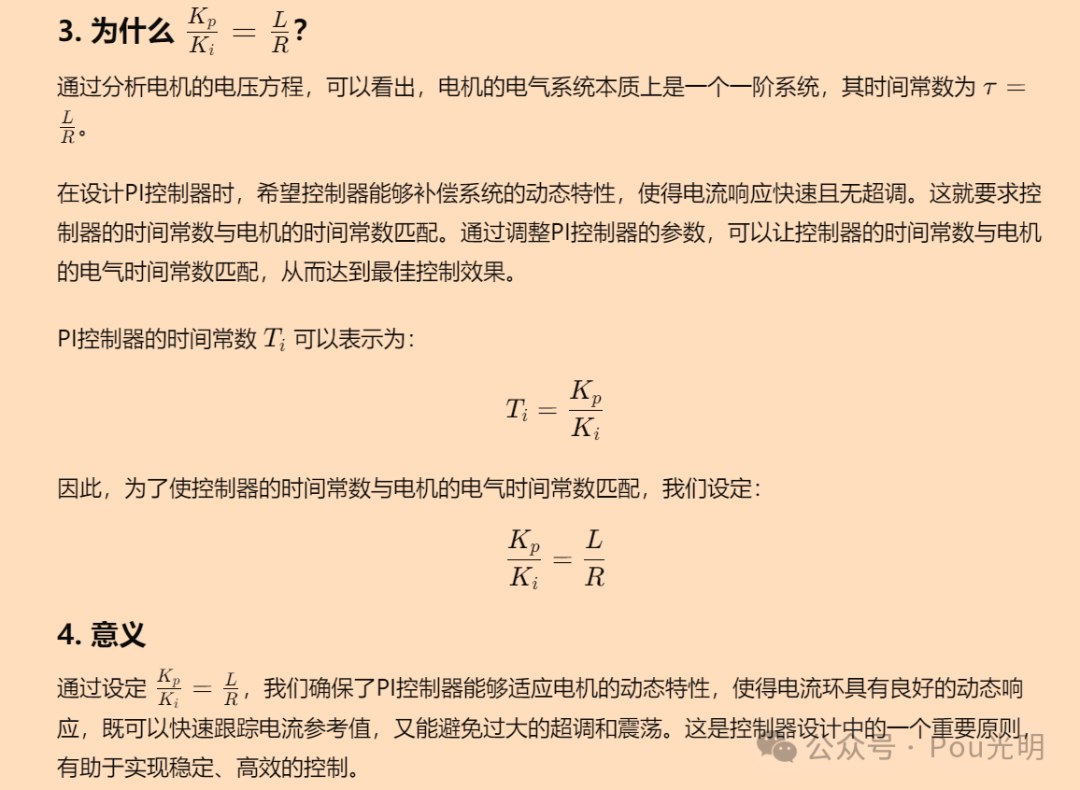
我还不是很明白,模模糊糊…继续:
凡以一阶微分方程描述运动方程的控制系统,称为一阶系统。
该传递函数与典I性系统的开环传递函数形式相同:
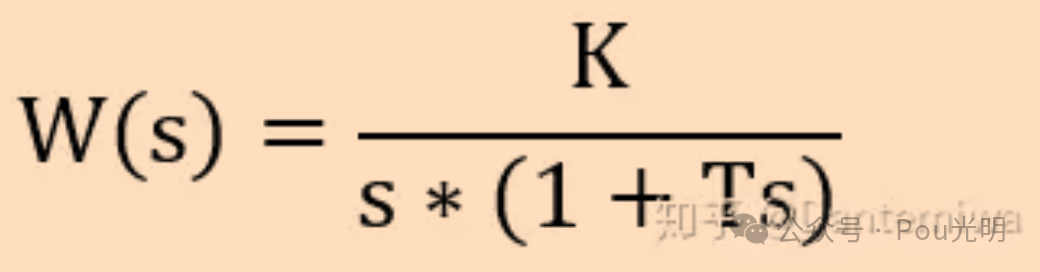
式3-2
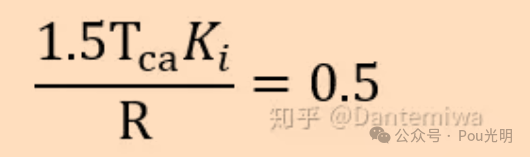
T是系统的惯性时间常数,K为系统的开环增益。然后:
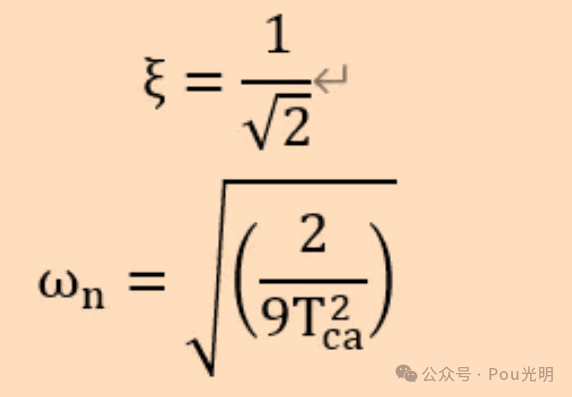
如果系统没有特殊要求,取折中值
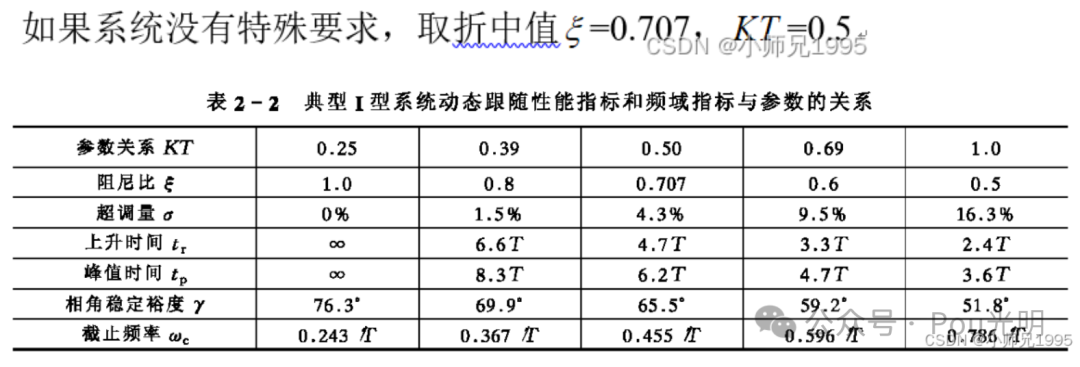
这个表格翻了几本自控书也没翻到…
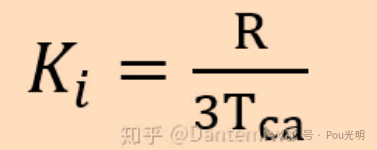
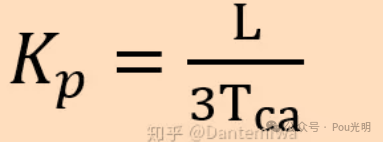
对比式3-1与式3-2,喜提第一个结论:
即:
2、电流环PI控制器闭环传递函数

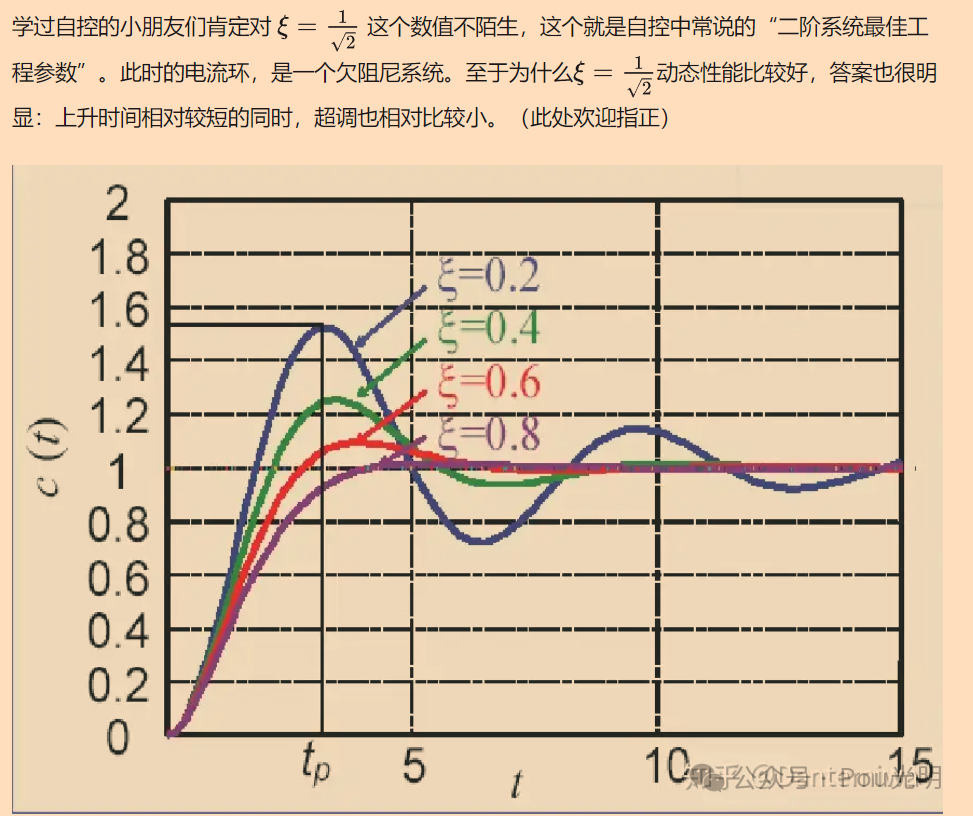
这是个典型二阶系统,则:
GPT:
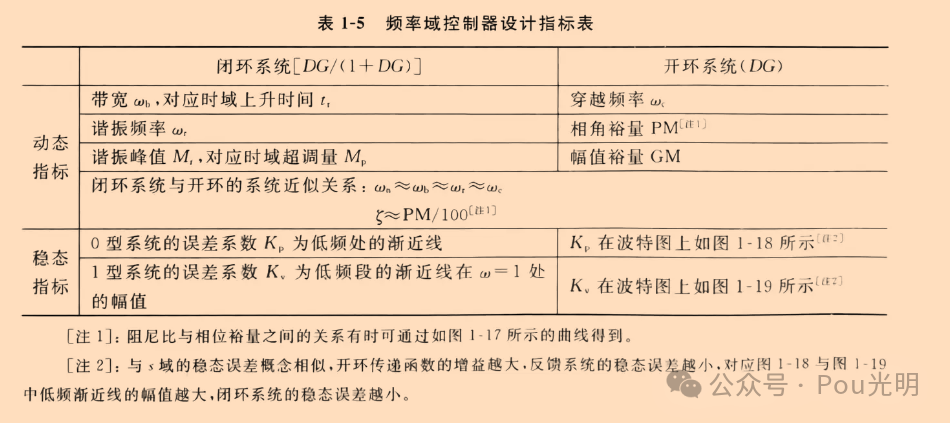
其中下表说明了一点:穿越频率 𝜔𝑐 可以近似为闭环带宽 𝜔𝑏 (实际上 𝜔𝑐 应该更接近谐振峰值频率,比闭环带宽应该更小一些)
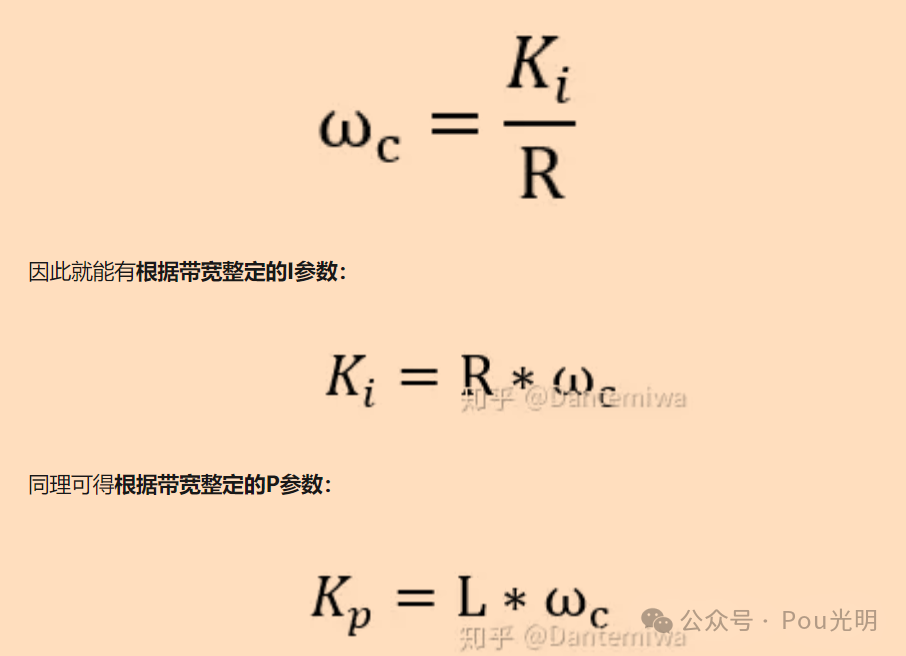
3、根据带宽进行参数整定
抄不动了,剩下的需要消化了。
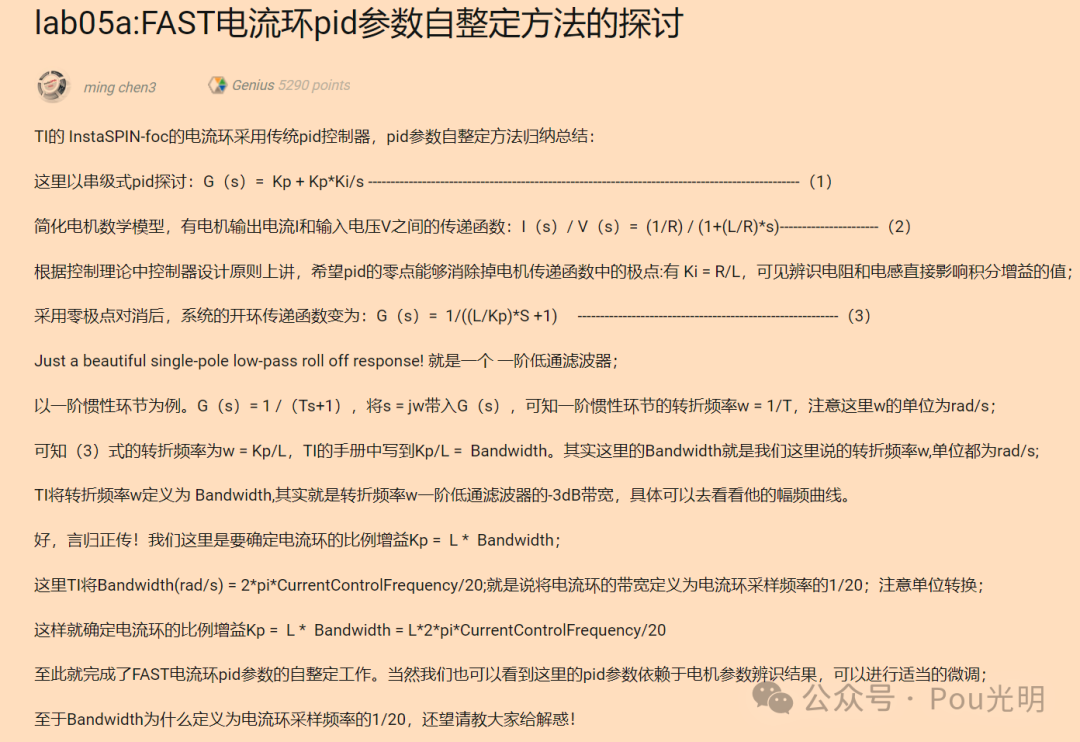
https://zhuanlan.zhihu.com/p/146373628















 2626
2626

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









