三角法求深度(triangulation)
在知道了相机的轨迹以后,使用三角法就能计算某个点的深度,在Hartley的《Multiple view Geometry》一书中第10章、第12章都是讲的这个,这里只讲解线性求解方法。
对于三维空间中的一点
P ,我们假设第一个摄像机坐标系
C 1 就是世界坐标系,P在世界坐标系下的表示为
P = ( x , y , z , 1 ) T ,这时,摄像机坐标系
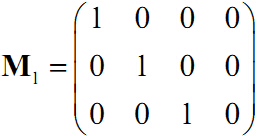
C 1 的外参数矩阵
M 1 为单位矩阵。
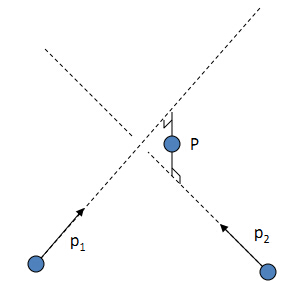
点
P 和光心的连线交第一个图像平面于点
p 1 ,注意这里的
p 1 是在摄像机坐标系的坐标表示,不是在图像坐标系下,这在上一篇博客中已经强调。同理,和第二个摄像机光心连线交第二幅图像于点
p 2 。
p i 在各自摄像机坐标系中的表示为:
p 1 = ⎛ ⎝ ⎜ x 1 y 1 1 ⎞ ⎠ ⎟ c 1 和
p 2 = ⎛ ⎝ ⎜ x 2 y 2 1 ⎞ ⎠ ⎟ c 2
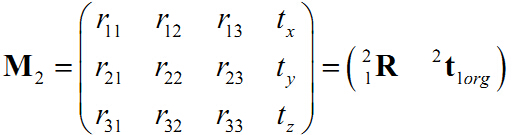
摄像机坐标系
C 2 的外参数矩阵为
M 2 ,由于摄像机坐标系
C 1 就是世界坐标系,所以有
在推导本征矩阵
E 的时候,我们说
R 是从坐标系
C 2 到坐标系
C 1 的旋转变换矩阵,即
1 2 R 。t是平移,更确却的说是光心
C 2 在
C 1 中的坐标表示,即
1 t 2 。所以在通过8点法求出的R,T以后,得到的从摄像机坐标2变换到到摄像机坐标系1的变换矩阵为
1 2 H = [ R 3 × 3 0 t 3 × 1 1 ]
而这里的外参数矩阵
M 2 是将世界坐标系中的一点P投影到摄像机坐标系
C 2 。所以
M 2 = 2 1 H = 1 2 H − 1 ,只需去掉H矩阵的最下面一行齐次坐标就行了。所以,通过本征矩阵得到R,t以后,要计算摄像机坐标系
C 2 外参数矩阵的程序如下:
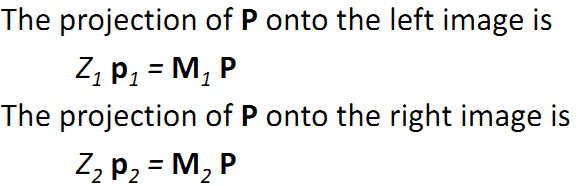
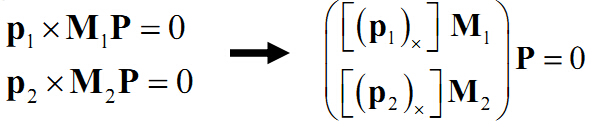
有了外参矩阵,我们就可以得到这些点坐标的关系:
由于光心
C i ,三维坐标点P,以及
p i 三点共线,所以向量
C i p i 、 C i P 的叉乘应该为0,上述方程又可以转化为:
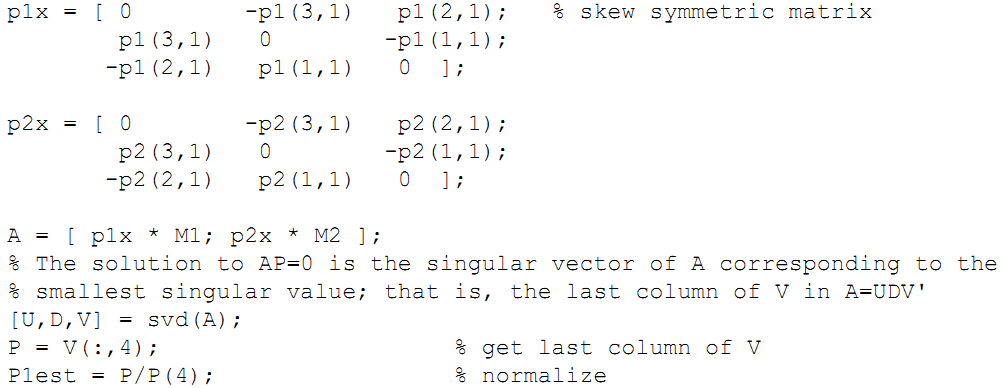
这又是一个要用最小二乘求解的线性方程方程组 ,和求本征矩阵一样,计算矩阵A的SVD分解,然后奇异值最小的那个奇异向量就是三维坐标P的解。程序如下:
计算出来的P的坐标就是P在世界坐标系中的坐标,这里就是P在摄像机坐标系
C 1 中的表示。并且注意上篇博客中强调过的:
p 1 = K − 1 ⎛ ⎝ ⎜ u 1 v 1 1 ⎞ ⎠ ⎟ 、
p 2 = K − 1 ⎛ ⎝ ⎜ u 2 v 2 1 ⎞ ⎠ ⎟
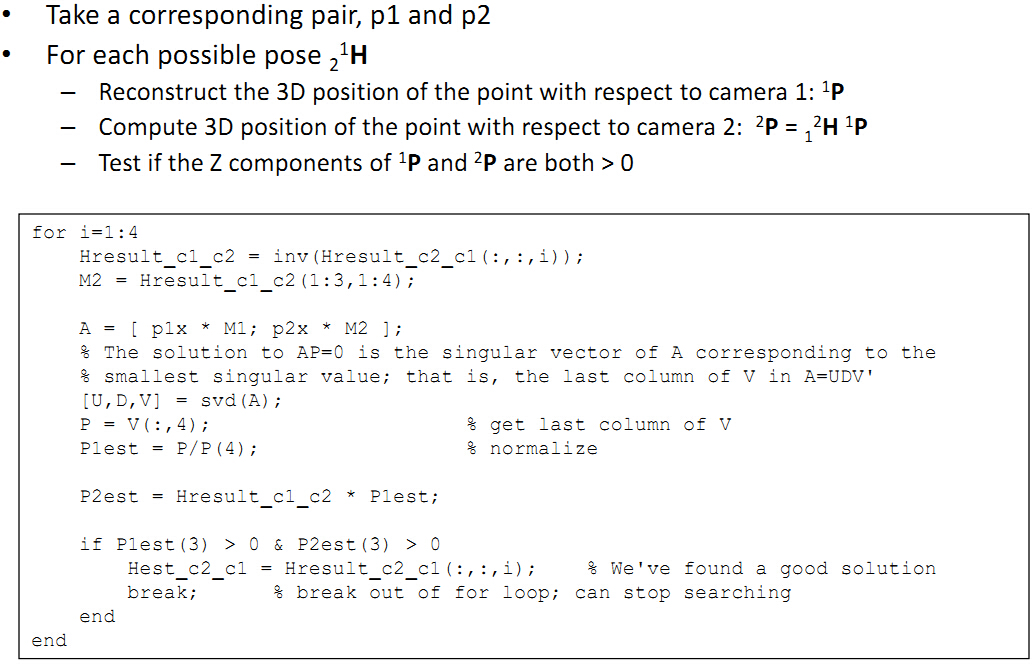
上篇博客中还提到本征矩阵恢复的R,T组合有四种组合形式,我们需要通过计算点的深度来判断R,T的哪种组合是正确的,和这篇博客结合起来,获得R,T正确组合的流程和代码如下:
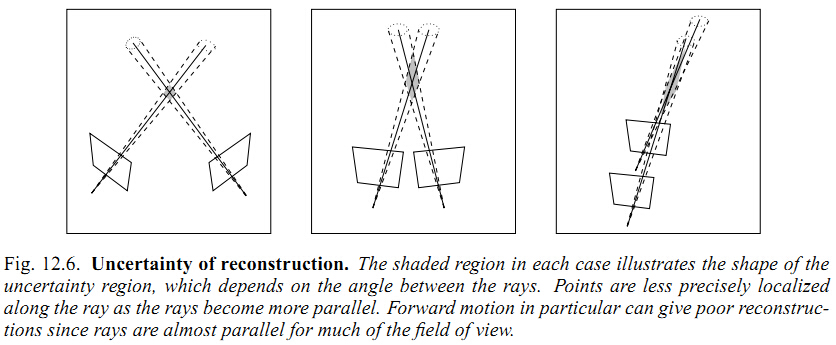
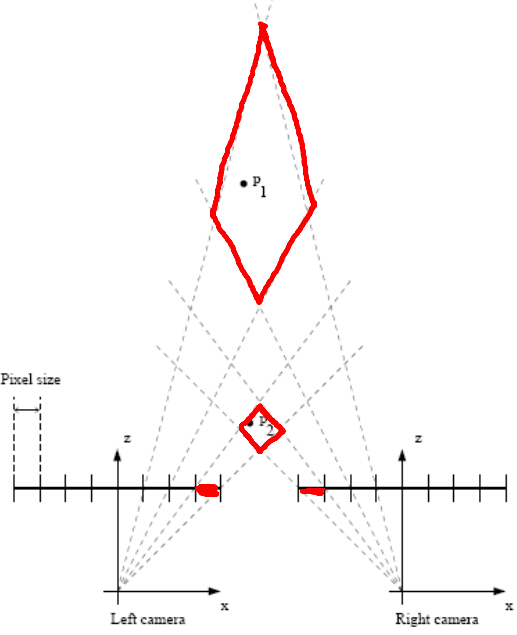
从两幅图中可以看出,两个射线夹角越小,误差协方差越大。所以点到光心连线组成的射线向量在orbslam中是有明确记录的。
(转载请注明作者和出处:
http://blog.csdn.net/heyijia0327 未经允许请勿用于商业用途)
reference:
博客主要参考了 professor William Hoff 的课件《structure from motion》


























 1784
1784

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









