







目录
第3章 Windows操作系统支持EtherCAT的基本步骤
第1章 EtherCAT入门
1.1 简介
EtherCAT(Ethernet for Control Automation Technology)是一种实时以太网通信协议,用于工业自动化和控制系统中实现高性能、实时数据传输和控制。它是由EtherCAT技术组织(ETG)开发和标准化的。
EtherCAT基于以太网物理层和数据链路层,但使用了一种特殊的通信方法,称为"Processing on the Fly"。这种方法使得数据帧能够在通过从站设备时进行实时处理,而不需要完全接收整个数据帧。这样,数据传输和控制可以实现高效率和低延迟。
EtherCAT通信采用主从架构,其中一个主站设备负责整个EtherCAT网络的管理和控制,而从站设备则负责在数据环网上传递数据。
主站设备可以是计算机、工控机、PLC等,
而从站设备可以是传感器、执行器、驱动器等。
EtherCAT具有以下特点:
-
实时性能:EtherCAT通过在数据环网上逐站处理数据,实现了高速和低延迟的数据传输。这使得它非常适用于对实时性要求较高的应用,如运动控制、机器视觉等。
-
灵活性:EtherCAT网络可以支持从几个节点到数千个节点的连接,同时支持多种网络拓扑结构,如星型、总线型、环形等。这使得它能够适应不同规模和复杂度的工业系统。
-
高带宽利用率:EtherCAT可以利用以太网的高带宽特性,同时在同一物理介质上传输控制数据和其他应用数据,从而提高带宽利用效率。
-
易于集成:EtherCAT基于以太网标准,使用标准的以太网物理层和数据链路层。这使得它能够与其他以太网设备和网络互操作,并且易于与现有以太网基础设施集成。
EtherCAT已经在工业自动化和控制领域得到广泛应用,包括机械设备、工厂自动化、过程控制等各种应用场景。它提供高效的实时通信和控制能力,帮助提升工业系统的性能、灵活性和可扩展性。
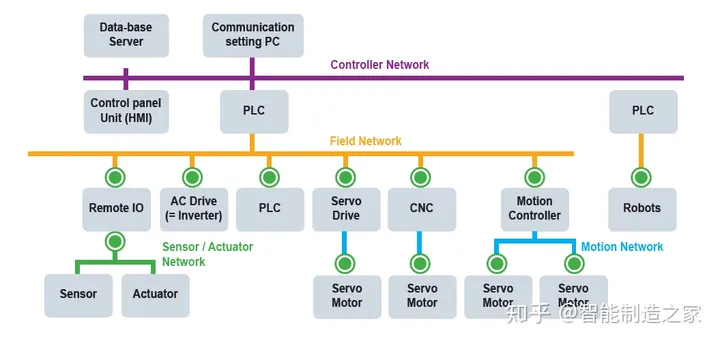
1.2 EtherCAT通信架构
EtherCAT通信架构基于主从架构,其中一个主站设备控制整个EtherCAT网络,而多个从站设备负责在数据环网上传递数据。以下是EtherCAT通信架构的主要组成部分:
-
主站(Master):主站是EtherCAT网络的控制中心,负责协调整个网络的数据传输和控制。主站可以是计算机、工控机、PLC等设备,它通过EtherCAT接口连接到EtherCAT网络。主站发送和接收数据帧,并处理从站设备的数据。
-
从站(Slave):从站是在EtherCAT网络中扮演被动角色的设备。从站可以是各种不同类型的设备,如传感器、执行器、驱动器等。每个从站设备都有一个唯一的设备地址,通过EtherCAT通信以实时方式与主站交换数据。
-
数据环网(Data Ring):数据环网是连接主站和从站的物理通信介质,通常是双绞线、光纤或其他以太网标准支持的物理介质。这个环网形成了一个环形或星型网络拓扑结构,可以支持多个从站设备连接到同一个环网上。
-
EtherCAT Slave Controller(ESC):每个从站设备上都有一个EtherCAT Slave Controller,负责实时处理和转发从站数据。它的作用是解析EtherCAT数据帧、执行数据处理和控制算法,并将数据传递到下一个从站或主站。
-
EtherCAT数据帧(Frame):EtherCAT数据帧是在数据环网上传输的通信单位,它包含控制指令、数据和状态信息。在一个周期内,主站从流经数据环网的每个从站设备上读取和写入数据。
EtherCAT的通信过程非常快速和高效。主站发送一个带有特殊控制字段的数据帧,该数据帧在数据环网上循环传输。每个从站设备通过处理数据帧中的控制指令,并在帧传输周期内完成数据读取和写入操作。数据帧的循环传输确保了实时性和低延迟的数据传输。
通过这种主从架构和实时数据传输方式,EtherCAT能够实现高性能的工业控制和自动化应用,适用于需要实时性、快速响应和高带宽的工业环境。
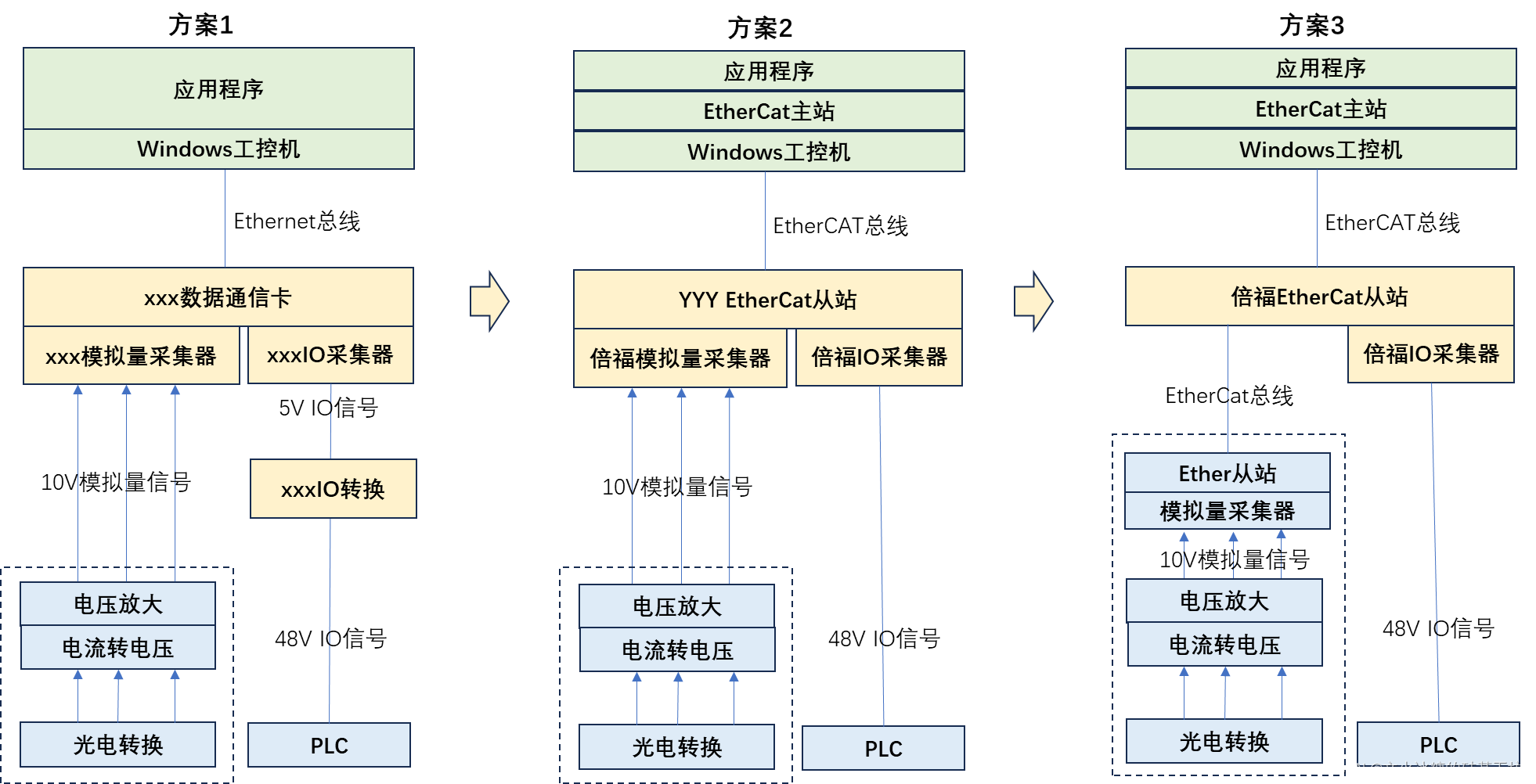
第2章 EtherCAT主站方案
2.1 方案概述
实现EtherCAT主站(Master)功能的方案有多种选择,取决于具体需求和系统架构。
以下是一些常见的EtherCAT主站方案:
-
PC-based软件主站:使用一台PC或工控机作为EtherCAT主站,通过安装适当的EtherCAT主站软件,如Beckhoff的TwinCAT或KINGSTAR的EtherCAT Master等,来实现EtherCAT通信和控制功能。这种方案适用于需要灵活性和可编程性的应用,适用于实时数据采集与处理。
-
PLC作为主站:许多主流PLC供应商提供了集成EtherCAT主站功能的PLC设备。这些PLC设备具有专用的EtherCAT接口,可以直接与EtherCAT网络连接。PLC作为主站具有实时性、可靠性和易于集成的特点,适用于以实时控制为主目标的工业控制和自动化系统,用于PLC控制从站设备。
-
封装主站模块:一些厂商提供了专用的EtherCAT主站模块,可以作为独立的硬件设备,通过串行通信接口(如串口、以太网接口等)连接到主控设备(如PC、PLC等)。这些模块通常提供了高性能的EtherCAT通信功能,可以方便地集成到现有的系统中。
无论选择哪种方案,实现EtherCAT主站功能的关键是:使用相应的EtherCAT主站软件或硬件模块,并遵循EtherCAT通信协议。该主站软件或硬件模块将提供EtherCAT数据交换和协议处理的功能,使主站能够与从站设备进行通信和控制。
2.2 主站配置步骤
在配置EtherCAT主站时,需要进行以下步骤:
-
设置通信参数:配置主站与EtherCAT网络连接的物理接口和通信参数,如波特率、网络拓扑结构等。
-
扫描并识别从站:通过主站软件或配置工具,进行EtherCAT网络的扫描和从站设备的识别。通过识别从站设备,为每个从站分配唯一的设备地址。
-
配置从站通信和数据:为每个从站配置通信参数和数据映射。这包括定义数据对象、数据类型、数据采样频率等。
-
开发应用程序:使用主站软件或编程环境,编写应用程序以实现与从站设备的数据交换、数据处理和控制操作。
需要注意的是,实现EtherCAT主站功能需要遵循EtherCAT通信协议规范,并使用与从站设备兼容的主站软件或硬件模块。在选择和配置EtherCAT主站方案时,应根据具体需求、开发平台和供应商支持来进行评估和选择。
2.3 EtherCAT主站软件
有多个供应商提供了EtherCAT主站软件,以下是几个常用的EtherCAT主站软件:
-
TwinCAT(Beckhoff):TwinCAT是Beckhoff提供的一款强大的EtherCAT主站软件。它是一个全面的自动化控制软件的开发平台,集成了PLC、运动控制、HMI和数据采集等功能。TwinCAT具有丰富的开发工具和库,可用于开发复杂的EtherCAT控制系统。
-
KINGSTAR EtherCAT Master(IntervalZero):KINGSTAR EtherCAT Master是IntervalZero公司提供的一种软件EtherCAT主站解决方案。它提供了实时以太网通信和控制功能,可与多个EtherCAT从站设备进行通信。KINGSTAR EtherCAT Master可以与Windows上的实时软件配合使用。
-
SoftMotion for EtherCAT(National Instruments):National Instruments提供了SoftMotion for EtherCAT软件,它是NI实时控制平台LabVIEW和CompactRIO的一部分。SoftMotion for EtherCAT具有强大的运动控制能力,可用于快速开发和部署EtherCAT控制系统。
-
CODESYS EtherCAT Master:CODESYS是一款广泛使用的可编程控制器开发环境,CODESYS EtherCAT Master是其提供的EtherCAT主站功能模块。它允许开发人员使用CODESYS进行EtherCAT通信和控制应用的开发,同时具备很好的可扩展性和灵活性。
-
SOEM(Simple Open EtherCAT Master)是一个开源的EtherCAT主站实现,由EtherLab项目开发并维护。它提供了一个简单、灵活和可移植的EtherCAT主站解决方案,适用于嵌入式系统和实时控制应用。
这些EtherCAT主站软件提供了丰富的功能和开发工具,可以满足各种复杂控制系统的需求。选择合适的软件取决于具体应用需求、开发平台和供应商支持。在选择软件之前,建议评估软件功能、易用性、性能和支持等因素,并根据实际案例进行验证。
第3章 Windows操作系统支持EtherCAT的基本步骤
Windows操作系统可以通过相应的驱动程序和软件支持EtherCAT(Ethernet for Control Automation Technology)。
EtherCAT是一种实时以太网通信协议,广泛用于工业自动化领域。
它使用基于以太网的通信方式,通过传输以太网数据帧的方式来实现实时数据传输和控制。
要在Windows上实现EtherCAT支持,可以采取以下步骤:
-
安装EtherCAT从设备驱动程序:首先,需要安装适用于Windows的EtherCAT驱动程序。这些驱动程序通常由EtherCAT硬件供应商提供,可用于与硬件EtherCAT从设备进行通信,实现etherCAT通信协议。
-
使用EtherCAT主站软件:在Windows上安装和配置EtherCAT主站软件,例如TwinCAT、EtherCAT Master等。这些软件允许用户配置和管理EtherCAT网络、从设备和通信参数。EtherCAT主站软件通过EtherCAT从设备驱动程序与从设备进行通信!!!
-
EtherCAT从设备配置:通过EtherCAT主站软件,用户可以进行EtherCAT设备的配置。这包括添加设备、定义设备通信地址和参数等。
-
开发应用程序:使用Windows下的编程语言和工具(如C/C++、C#等),开发应用程序以与EtherCAT设备进行通信。通常,EtherCAT的开发包和API可以提供给开发人员,以简化EtherCAT通信的编程。
-
数据传输和控制:通过编写应用程序,可以使用EtherCAT协议进行数据传输和控制。应用程序可以使用EtherCAT主站软件提供的API或驱动程序所提供的API,与EtherCAT设备进行实时通信。
需要注意的是,EtherCAT的支持和集成可能因硬件、操作系统版本和软件工具等因素而有所差异。在进行EtherCAT的集成和开发时,建议参考相关硬件和软件供应商提供的文档和指南,以确保正确配置和操作EtherCAT网络和设备。



















 572
572

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











