








一、步进电机工作原理
步进电机是一种将电脉冲信号转换为角位移或线位移的开环控制电机,通过控制输入脉冲的数量和频率,可实现精准的位置和速度控制。其核心工作原理如下:
- 电磁驱动与步进旋转
- 步进电机的定子绕组按特定时序通电,产生旋转磁场,吸引转子磁极转动固定角度(步距角)。
- 示例:四相五线步进电机通过A-B-C-D四相绕组依次通电,每步转子转动5.625°,完成一圈需4096个脉冲(减速比1:64时)。
- 步距角与细分控制
- 基本步距角:由电机结构决定(如1.8°/步)。
- 细分驱动:通过驱动器将步距角细分(如1/16细分后步距角为0.1125°),提升控制精度和平稳性。
- 开环控制特性
- 步进电机无需位置反馈即可实现精准定位,但需避免失步(负载过大或速度过高导致转子无法跟随脉冲)。
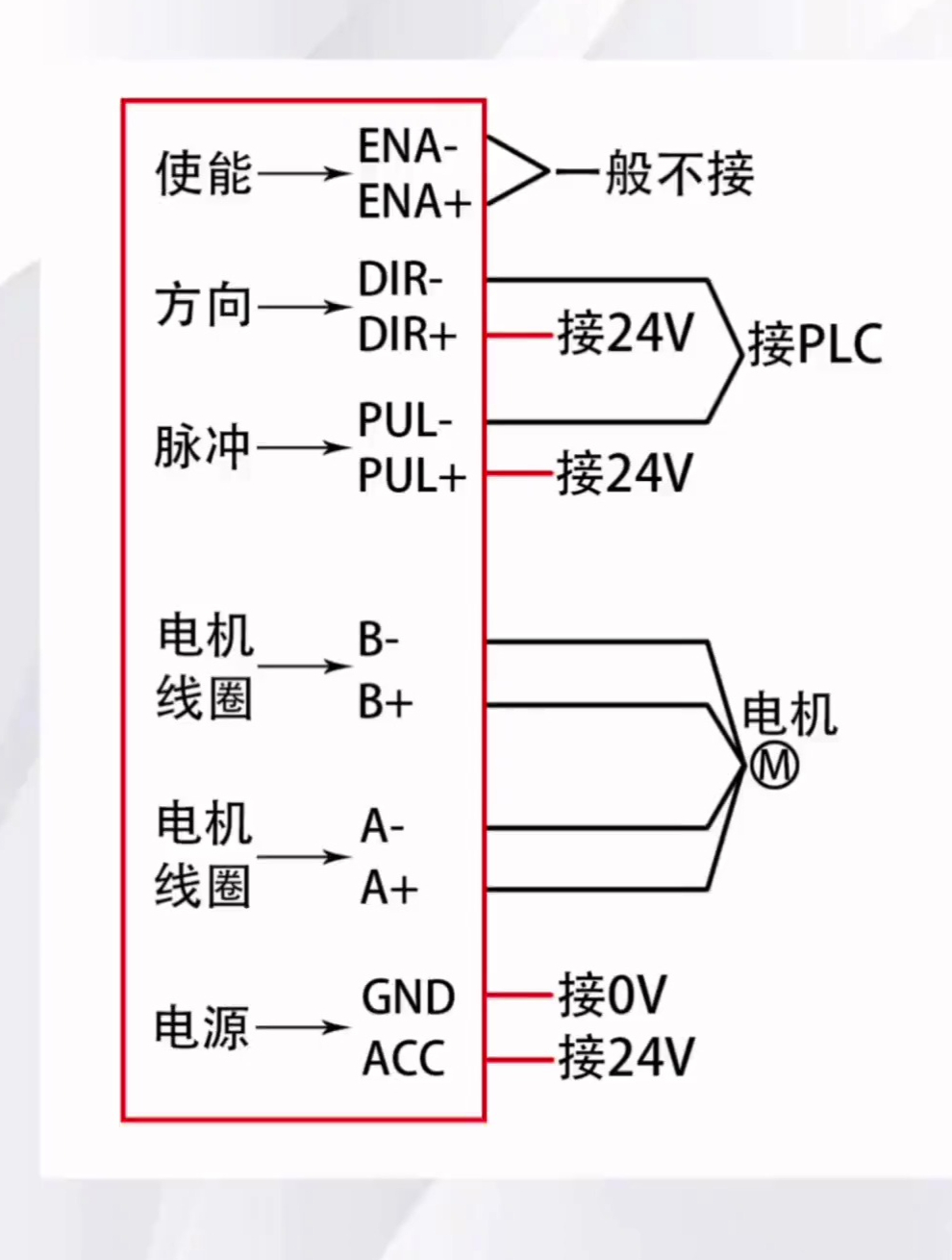
二、步进电机管脚定义与功能
步进电机的管脚定义因驱动方式和控制需求而异,常见分为以下两类:
1. 驱动器驱动器的控制管脚
以A4988驱动器为例,其管脚功能如下:
| 管脚名称 | 功能说明 |
|---|---|
| STEP | 脉冲输入:每输入一个脉冲,电机转动一个步距角。 |
| DIR | 方向控制:高/低电平控制电机正转/反转。 |
| ENABLE | 使能控制:低电平有效,禁用时电机处于自由状态。 |
| MS1/MS2/MS3 | 细分模式选择:通过不同电平组合设置细分步数(如全步、半步、1/16步等)。 |
| VMOT | 电机电源正极:连接驱动电机所需电源(8-35V)。 |
| GND | 电源地:电机电源和逻辑电路共地。 |
| VDD | 逻辑电源正极:为驱动器供电(3-5.5V)。 |
| 1A/1B/2A/2B | 电机绕组控制:连接电机四相绕组,驱动器通过控制绕组电流实现步进旋转。 |
2. 电机本体管脚
以四相五线步进电机为例,其管脚定义如下:
| 管脚编号 | 功能说明 |
|---|---|
| 红(A+) | A相绕组正极。 |
| 黄(A-) | A相绕组负极。 |
| 粉(B+) | B相绕组正极。 |
| 蓝(B-) | B相绕组负极。 |
| 黑/中线 | 公共端(部分电机为五线制,中线悬空;四线制电机无中线)。 |
三、步进电机控制与驱动示例
- 驱动器连接示例(A4988驱动四相电机)
- 电源连接:VMOT接电机电源(如12V),GND接地。
- 逻辑供电:VDD接5V,GND接地。
- 控制信号:
- STEP接MCU脉冲输出(如Arduino的PWM引脚)。
- DIR接方向控制引脚。
- ENABLE接地使能驱动器。
- 细分设置:MS1/MS2/MS3接高/低电平,选择细分模式(如全步、1/16步)。
- 电机绕组:1A/1B接A相(红/黄),2A/2B接B相(粉/蓝)。
- 控制逻辑
- 正转:DIR置高,STEP输入脉冲序列。
- 反转:DIR置低,STEP输入脉冲序列。
- 调速:通过调整脉冲频率控制转速(频率越高,转速越快)。
四、关键注意事项
- 电源匹配
- 驱动器电源电压需与电机额定电压匹配(如12V电机配12V电源)。
- 逻辑电源电压需与MCU兼容(如5V或3.3V)。
- 散热设计
- 步进电机和驱动器需良好散热,避免过热导致性能下降或损坏。
- 细分驱动优势
- 细分驱动可减小振动和噪声,提升低速平稳性,但需注意细分后步距角减小,脉冲总数需相应增加。
- 失步预防
- 避免负载过大或加速过快,必要时增加闭环控制(如编码器反馈)。



















 612
612

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











