









结构运动-摄像机运动估计
目标
在本教程中,您将学习如何使用重建api的摄像机运动估计:
- 加载文件与跟踪二维点,并建立容器的所有帧。
- libmv重建传递途径运行。
- 使用即显示结果。
从运动中恢复结构SfM模块安装
使用情况和结果
为了运行这个示例,我们需要指定的路径跟踪点文件,相机的焦距长度除了中心投影坐标(以像素为单位)。 你可以找到一个示例文件/数据/ desktop_trakcks.txt样品
./example_sfm_trajectory_reconstruction desktop_tracks.txt 1914 640 360
./sfm_test ../desktop_tracks.txt 1914 640 360
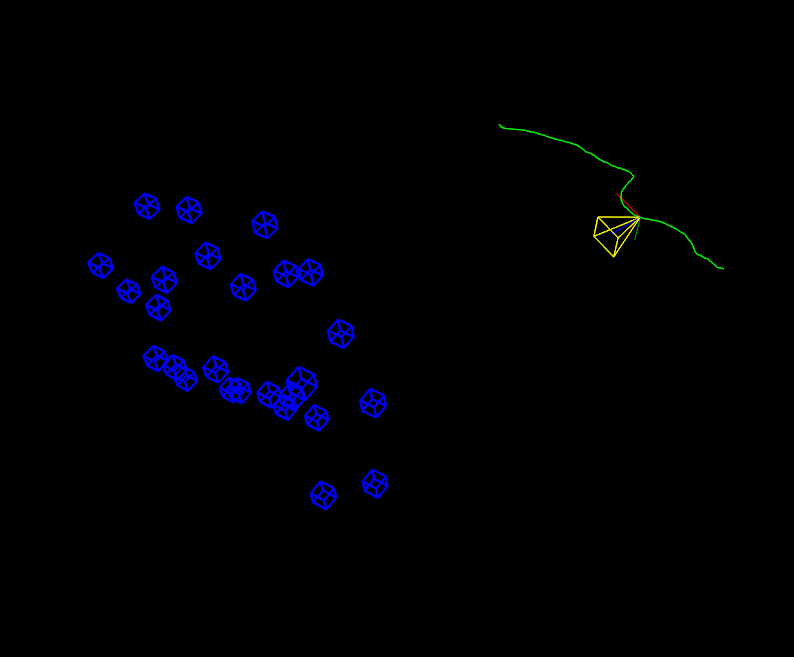
下面的图片显示了获得相机运动从追踪获得2 d点:


Code
代码
#define CERES_FOUND 1
#include <opencv2/sfm.hpp>
#include <opencv2/core.hpp>
#include <opencv2/sfm.hpp>
#include <opencv2/viz.hpp>
#include <opencv2/sfm/reconstruct.hpp>
#include <opencv2/sfm/simple_pipeline.hpp>
#include "/usr/local/include/opencv2/sfm/reconstruct.hpp"
//#include "reconstruct2.hpp"
#include <opencv2/calib3d.hpp>
#include <opencv2/core.hpp>
#include <iostream>
#include <fstream>
#include <opencv2/core.hpp>
#include <opencv2/sfm.hpp>
#include <opencv2/viz.hpp>
#include <iostream>
#include <fstream>
using namespace std;
using namespace cv;
using namespace cv::sfm;
static void help() {
cout
<< "\n------------------------------------------------------------------\n"
<< " This program shows the camera trajectory reconstruction capabilities\n"
<< " in the OpenCV Structure From Motion (SFM) module.\n"
<< " \n"
<< " Usage:\n"
<< " example_sfm_trajectory_reconstruction <path_to_tracks_file> <f> <cx> <cy>\n"
<< " where: is the tracks file absolute path into your system. \n"
<< " \n"
<< " The file must have the following format: \n"
<< " row1 : x1 y1 x2 y2 ... x36 y36 for track 1\n"
<< " row2 : x1 y1 x2 y2 ... x36 y36 for track 2\n"
<< " etc\n"
<< " \n"
<< " i.e. a row gives the 2D measured position of a point as it is tracked\n"
<< " through frames 1 to 36. If there is no match found in a view then x\n"
<< " and y are -1.\n"
<< " \n"
<< " Each row corresponds to a different point.\n"
<< " \n"
<< " f is the focal lenght in pixels. \n"
<< " cx is the image principal point x coordinates in pixels. \n"
<< " cy is the image principal point y coordinates in pixels. \n"
<< "------------------------------------------------------------------\n\n"
<< endl;
}
/* Build the following structure data
*
* frame1 frame2 frameN
* track1 | (x11,y11) | -> | (x12,y12) | -> | (x1N,y1N) |
* track2 | (x21,y11) | -> | (x22,y22) | -> | (x2N,y2N) |
* trackN | (xN1,yN1) | -> | (xN2,yN2) | -> | (xNN,yNN) |
*
*
* In case a marker (x,y) does not appear in a frame its
* values will be (-1,-1).
*/
void
parser_2D_tracks(const String &_filename, std::vector<Mat> &points2d )
{
ifstream myfile(_filename.c_str());
if (!myfile.is_open())
{
cout << "Unable to read file: " << _filename << endl;
exit(0);
} else {
double x, y;
string line_str;
int n_frames = 0, n_tracks = 0;
// extract data from text file
vector<vector<Vec2d> > tracks;
for ( ; getline(myfile,line_str); ++n_tracks)
{
istringstream line(line_str);
vector<Vec2d> track;
for ( n_frames = 0; line >> x >> y; ++n_frames)
{
if ( x > 0 && y > 0)
track.push_back(Vec2d(x,y));
else
track.push_back(Vec2d(-1));
}
tracks.push_back(track);
}
// embed data in reconstruction api format
for (int i = 0; i < n_frames; ++i)
{
Mat_<double> frame(2, n_tracks);
for (int j = 0; j < n_tracks; ++j)
{
frame(0,j) = tracks[j][i][0];
frame(1,j) = tracks[j][i][1];
}
points2d.push_back(Mat(frame));
}
myfile.close();
}
}
/* Keyboard callback to control 3D visualization
*/
bool camera_pov = false;
void keyboard_callback(const viz::KeyboardEvent &event, void* cookie)
{
if ( event.action == 0 &&!event.symbol.compare("s") )
camera_pov = !camera_pov;
}
/* Sample main code
*/
//void cv::sfm::reconstruct(InputArrayOfArrays points2d, OutputArray Rs, OutputArray Ts, InputOutputArray K,OutputArray points3d, bool is_projective = false);
int main(int argc, char** argv)
{
// Read input parameters
if ( argc != 5 )
{
help();
exit(0);
}
// Read 2D points from text file
std::vector<Mat> points2d;
parser_2D_tracks( argv[1], points2d );
// Set the camera calibration matrix
const double f = atof(argv[2]),
cx = atof(argv[3]), cy = atof(argv[4]);
Matx33d K = Matx33d( f, 0, cx,
0, f, cy,
0, 0, 1);
bool is_projective = true;
vector<Mat> Rs_est, ts_est, points3d_estimated;
cv::sfm::reconstruct(points2d, Rs_est, ts_est, K, points3d_estimated, is_projective);
// Print output
cout << "\n----------------------------\n" << endl;
cout << "Reconstruction: " << endl;
cout << "============================" << endl;
cout << "Estimated 3D points: " << points3d_estimated.size() << endl;
cout << "Estimated cameras: " << Rs_est.size() << endl;
cout << "Refined intrinsics: " << endl << K << endl << endl;
cout << "3D Visualization: " << endl;
cout << "============================" << endl;
viz::Viz3d window_est("Estimation Coordinate Frame");
window_est.setBackgroundColor(); // black by default
window_est.registerKeyboardCallback(&keyboard_callback);
// Create the pointcloud
cout << "Recovering points ... ";
// recover estimated points3d
vector<Vec3f> point_cloud_est;
for (int i = 0; i < points3d_estimated.size(); ++i)
point_cloud_est.push_back(Vec3f(points3d_estimated[i]));
cout << "[DONE]" << endl;
cout << "Recovering cameras ... ";
vector<Affine3d> path_est;
for (size_t i = 0; i < Rs_est.size(); ++i)
path_est.push_back(Affine3d(Rs_est[i],ts_est[i]));
cout << "[DONE]" << endl;
cout << "Rendering Trajectory ... ";
cout << endl << "Press: " << endl;
cout << " 's' to switch the camera pov" << endl;
cout << " 'q' to close the windows " << endl;
if ( path_est.size() > 0 )
{
// animated trajectory
int idx = 0, forw = -1, n = static_cast<int>(path_est.size());
while(!window_est.wasStopped())
{
for (size_t i = 0; i < point_cloud_est.size(); ++i)
{
Vec3d point = point_cloud_est[i];
Affine3d point_pose(Mat::eye(3,3,CV_64F), point);
char buffer[50];
sprintf (buffer, "%d", static_cast<int>(i));
viz::WCube cube_widget(Point3f(0.1,0.1,0.0), Point3f(0.0,0.0,-0.1), true, viz::Color::blue());
cube_widget.setRenderingProperty(viz::LINE_WIDTH, 2.0);
window_est.showWidget("Cube"+String(buffer), cube_widget, point_pose);
}
Affine3d cam_pose = path_est[idx];
viz::WCameraPosition cpw(0.25); // Coordinate axes
viz::WCameraPosition cpw_frustum(K, 0.3, viz::Color::yellow()); // Camera frustum
if ( camera_pov )
window_est.setViewerPose(cam_pose);
else
{
// render complete trajectory
window_est.showWidget("cameras_frames_and_lines_est", viz::WTrajectory(path_est, viz::WTrajectory::PATH, 1.0, viz::Color::green()));
window_est.showWidget("CPW", cpw, cam_pose);
window_est.showWidget("CPW_FRUSTUM", cpw_frustum, cam_pose);
}
// update trajectory index (spring effect)
forw *= (idx==n || idx==0) ? -1: 1; idx += forw;
// frame rate 1s
window_est.spinOnce(1, true);
window_est.removeAllWidgets();
}
}
return 0;
}
解释
首先,我们需要加载这个文件包含2 d点跟踪所有帧和构造容器重建api。 在这种情况下,跟踪2 d点会有以下结构,2 d点的向量数组,每个数组内代表一个不同的帧。 每一帧由2 d点的列表,例如第一个点在坐标系1点在坐标系2相同。 如果没有在一帧分配的值将被(-1,-1):
/* Build the following structure data
*
* frame1 frame2 frameN
* track1 | (x11,y11) | -> | (x12,y12) | -> | (x1N,y1N) |
* track2 | (x21,y11) | -> | (x22,y22) | -> | (x2N,y2N) |
* trackN | (xN1,yN1) | -> | (xN2,yN2) | -> | (xNN,yNN) |
*
*
* In case a marker (x,y) does not appear in a frame its
* values will be (-1,-1).
*/
...
for (int i = 0; i < n_frames; ++i)
{
Mat_<double> frame(2, n_tracks);
for (int j = 0; j < n_tracks; ++j)
{
frame(0,j) = tracks[j][i][0];
frame(1,j) = tracks[j][i][1];
}
points2d.push_back(Mat(frame));
}
Secondly, the built container will be used to feed the reconstruction api. It is important outline that the estimated results must be stored in a vector<Mat>:
其次,建立集装箱将被用来喂重建api。 重要的是大纲,必须存储在一个向量的估计结果<<Mat>:
bool is_projective =true;
vector<Mat> Rs_est, ts_est, points3d_estimated;
reconstruct(points2d, Rs_est, ts_est, K, points3d_estimated, is_projective(投影的));
// Print output
cout << "\n----------------------------\n" << endl;
cout << "Reconstruction: " << endl;
cout << "============================" << endl;
cout << "Estimated 3D points: " << points3d_estimated.size() << endl;
cout << "Estimated cameras: " << Rs_est.size() << endl;
cout << "Refined intrinsics: " << endl << K << endl << endl;
Finally, the obtained results will be shown in Viz, in this case reproducing(复制) the camera with an oscillation(振荡) effect.
最后,获得的结果将即所示,在这种情况下相机的重建效果。
cmake 文件
project(sfm_test)
CMAKE_MINIMUM_REQUIRED(VERSION 2.6)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
set("OpenCV_DIR" "/usr/local/share/OpenCV/")
find_package( OpenCV REQUIRED )
MESSAGE("OpenCV vesion: ${OpenCV_VERSION}")
find_package(Ceres REQUIRED)
find_package(Gflags QUIET)
find_package(Ceres QUIET)
# include(CheckCXXCompilerFlag)
AUX_SOURCE_DIRECTORY(. DIR_SRCS)
ADD_EXECUTABLE(sfm_test ${DIR_SRCS} )
target_link_libraries( sfm_test ${OpenCV_LIBS} )reconstruct()说明
§ reconstruct() [1/4]
| void cv::sfm::reconstruct | ( | InputArrayOfArrays | points2d, |
| OutputArray | Ps, | ||
| OutputArray | points3d, | ||
| InputOutputArray | K, | ||
| bool | is_projective = false | ||
| ) |
在执行自动校准时从2d对应重建3d点。
参数
| points2d | 2d点矢量的输入矢量(内部矢量是每个图像)。 |
| PS | 输出向量与每个图像的3x4投影矩阵。 |
| points3d | 具有估计的3d点的输出数组。 |
| ķ | 输入/输出相机矩阵\(K = \ vecthreethree {f_x} {0} {c_x} {0} {f_y} {c_y} {0} {0} {1} \)。 输入参数用作初始猜测。 |
| is_projective | 如果是真的,相机应该是投射的。 |
该方法调用以下签名并从估计的K,R和t中提取投影矩阵。
注意
- 轨道必须尽可能精确。 它不处理异常值并且对它们非常敏感。
§ reconstruct() [2/4]
| void cv::sfm::reconstruct | ( | InputArrayOfArrays | points2d, |
| OutputArray | Rs, | ||
| OutputArray | Ts, | ||
| InputOutputArray | K, | ||
| OutputArray | points3d, | ||
| bool | is_projective = false | ||
| ) |
在执行自动校准时从2d对应重建3d点。
参数
通过实例化SFMLibmvEuclideanReconstruction类,在内部调用libmv简单管道例程和一些默认参数。 注意
| |||||||||||||
问题
'reconstruct' is not a member of 'cv::sfm'
This is because of the Mismatch of Required Ceres, Eigen version from the SFM Module. The CERES_FOUND flag is set to 0 internally because of the newer Ceres version!
You can manually set this flag to 1 like this. before including the SFM modules.
#define CERES_FOUND 1
#include <opencv2/sfm.hpp>














 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









