










1.摘要
路径规划对于实现无人水下航行器(UUV)集群在复杂和动态水下环境中的高效协同作业至关重要。本文提出了一种三维UUV集群协同路径规划框架,其基于改进灰狼算法NCM-GWO构建,其通过将布谷鸟搜索(CS)的全局搜索机制与多种群策略(MP)的局部精细化机制相结合,实现探索和开发之间实平衡。此外,NCM-GWO采用非线性搜索策略动态调整收敛因子,进一步增强了算法在复杂三维环境中的性能。
2.灰狼算法GWO原理
3.协同路径规划
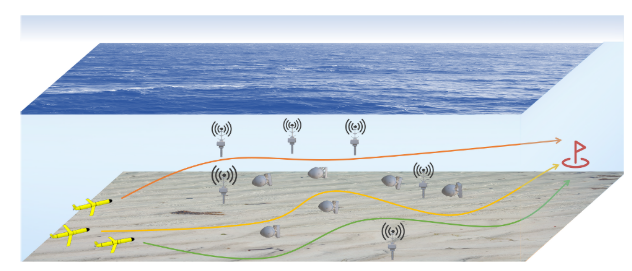
UUV群必须在复杂的水下环境中导航,包括声纳探测区和鱼雷威胁区,协同到达目标区域并执行后续操作。设 V = { V i , i = 1 , 2 , … , n } \mathcal{V}=\{V_i,i=1,2,\ldots,n\} V={Vi,i=1,2,…,n}表示所有的无人水下航行器 (UUV) , T = { T i , i = \mathcal{T}=\{T_i,i= T={Ti,i= 1 , 2 , … , n } 1,2,\ldots,n\} 1,2,…,n}表示它们各自的目标点, M = { M i , i = 1 , 2 , … , m } \mathcal{M}=\{M_i,i=1,2,\ldots,m\} M={Mi,i=1,2,…,m}表示环境中的所有威胁。
对于每个UUV
V
i
V_i
Vi,起始点为
S
i
S_i
Si ,目标点为
G
i
G_i
Gi ,路径上的节点表示为
P
i
k
P_i^k
Pik。在约束条件
F
F
F下,从
S
i
S_i
Si到
G
i
G_i
Gi的路径轨迹可以表示:
S
i
→
P
i
1
→
⋯
→
P
i
n
k
→
G
i
S_i\to P_i^1\to\cdots\to P_i^{n_k}\to G_i
Si→Pi1→⋯→Pink→Gi
运动学约束
运动学约束源于无人水下航行器(UUV)固有的机动性限制。假设所有UUV具有一致的机动性能,所考虑的运动学约束包括潜水速度、倾斜角、偏航角、潜水深度和最大航程的限制:
{
v
min
≤
v
≤
v
max
,
−
θ
max
≤
θ
≤
θ
max
,
−
ϕ
max
≤
ϕ
≤
ϕ
max
,
h
min
≤
h
≤
h
max
<
0
,
0
≤
l
≤
l
max
\begin{equation*} \left\{ \begin{array}{l} v_{\text{min}} \leq v \leq v_{\text{max}}, \\ -\theta_{\text{max}} \leq \theta \leq \theta_{\text{max}}, \\ -\phi_{\text{max}} \leq \phi \leq \phi_{\text{max}}, \\ h_{\text{min}} \leq h \leq h_{\text{max}} < 0, \\ 0 \leq l \leq l_{\text{max}} \end{array} \right. \end{equation*}
⎩
⎨
⎧vmin≤v≤vmax,−θmax≤θ≤θmax,−ϕmax≤ϕ≤ϕmax,hmin≤h≤hmax<0,0≤l≤lmax
其中,
v
v
v为航行速度,
θ
\theta
θ为倾斜角,
ϕ
\phi
ϕ为偏航角,
h
h
h为潜水深度,
l
l
l为航行距离,定义每个无人潜航器的燃油成本函数和航行距离:
f
o
=
l
l
max
f_o=\frac{l}{l_{\max}}
fo=lmaxl
l
i
=
∥
S
i
−
P
i
1
∥
+
∥
G
i
−
P
i
n
k
∥
+
∑
n
k
−
1
∥
P
i
n
−
P
i
n
+
1
∥
l_i=\|S_i-P_i^1\|+\|G_i-P_i^{n_k}\|+\sum^{n_k-1}\|P_i^n-P_i^{n+1}\|
li=∥Si−Pi1∥+∥Gi−Pink∥+∑nk−1∥Pin−Pin+1∥
威胁约束
威胁约束主要是指任务环境中无法进入或只能短暂进入的区域,同时考虑了声纳威胁约束和鱼雷威胁约束。UUV声纳威胁代价函数定义为:
f
t
s
=
{
0
,
i
f
d
>
d
t
s
,
1
d
2
,
i
f
d
≤
d
t
s
,
f_{ts}= \begin{cases} 0, & \mathrm{if}d>d_{ts}, \\ \frac{1}{d^{2}}, & \mathrm{if}d\leq d_{ts}, & \end{cases}
fts={0,d21,ifd>dts,ifd≤dts,
UUV的鱼雷威胁代价函数定义为:
f
t
t
=
{
0
,
i
f
d
>
d
t
t
,
1
d
,
i
f
d
≤
d
t
t
,
f_{tt}= \begin{cases} 0, & \mathrm{if}d>d_{tt}, \\ \frac{1}{d}, & \mathrm{if}d\leq d_{tt}, & \end{cases}
ftt={0,d1,ifd>dtt,ifd≤dtt,
空间约束
空间协同约束主要解决无人潜航器之间的避碰问题。在无人潜航器群的协调运动中,任意两个无人潜航器之间的距离必须不小于安全距离:
d
i
,
j
≥
d
s
a
f
e
d_{i,j}\geq d_{safe}
di,j≥dsafe
时间约束
时间协同约束主要是指在协同任务中,每个无人潜航器必须在规定时间内完成其任务的要求。根据UUV的速度范围和路径轨迹的长度,可以确定到达目标点的时间范围如下:
t
min
i
=
l
i
v
max
i
,
t
max
i
=
l
i
v
min
i
,
t_{\min}^i=\frac{l_i}{v_{\max}^i},\quad t_{\max}^i=\frac{l_i}{v_{\min}^i},
tmini=vmaxili,tmaxi=vminili,
时间成本计算如下:
f
t
=
{
0
,
t
min
i
≤
t
c
≤
t
max
i
,
∣
t
i
−
t
c
∣
,
otherwise,
f_t= \begin{cases} 0, & t_{\min}^i\leq t_c\leq t_{\max}^i, \\ \left|t_i-t_c\right|, & \text{otherwise,} & \end{cases}
ft={0,∣ti−tc∣,tmini≤tc≤tmaxi,otherwise,
路径平滑性约束
规划路径的平滑度是UUV群路径规划的关键因素。为了量化平滑度引入了统一成本函数:
f
s
=
∑
i
=
1
n
−
1
{
1
,
i
f
∣
Δ
θ
i
∣
>
θ
max
o
r
∣
Δ
ϕ
i
∣
>
ϕ
max
0
,
o
t
h
e
r
w
i
s
e
,
f_s=\sum_{i=1}^{n-1} \begin{cases} 1, & \mathrm{if}|\Delta\theta_i|>\theta_{\max}\mathrm{or}|\Delta\phi_i|>\phi_{\max} \\ 0, & \mathrm{otherwise} & \end{cases},
fs=i=1∑n−1{1,0,if∣Δθi∣>θmaxor∣Δϕi∣>ϕmaxotherwise,
优化目标:
J
1
=
∑
i
=
1
n
(
w
o
f
o
+
w
h
f
h
+
w
t
s
f
t
s
+
w
t
t
f
t
t
+
w
s
f
s
)
J_1=\sum_{i=1}^n\left(w_of_o+w_hf_h+w_{ts}f_{ts}+w_{tt}f_{tt}+w_sf_s\right)
J1=i=1∑n(wofo+whfh+wtsfts+wttftt+wsfs)
多uuv的导航成本主要考虑协同约束,包括空间协同约束成本和时间协同约束成本:
J
2
=
∑
i
=
1
n
(
w
c
f
c
+
w
t
f
t
)
J_2=\sum_{i=1}^n \begin{pmatrix} w_cf_c+w_tf_t \end{pmatrix}
J2=i=1∑n(wcfc+wtft)
4.改进策略
布谷鸟搜索机制
灰狼位置更新为:
{
X
c
s
1
=
X
1
+
δ
×
(
X
1
−
X
α
)
×
s
,
X
c
s
2
=
X
2
+
δ
×
(
X
2
−
X
α
)
×
s
,
X
c
s
3
=
X
3
+
δ
×
(
X
3
−
X
α
)
×
s
,
\begin{cases} \boldsymbol{X}_{cs}^1=\boldsymbol{X}_1+\delta\times\left(\boldsymbol{X}_1-\boldsymbol{X}_\alpha\right)\times s, \\ \boldsymbol{X}_{cs}^2=\boldsymbol{X}_2+\delta\times\left(\boldsymbol{X}_2-\boldsymbol{X}_\alpha\right)\times s, \\ \boldsymbol{X}_{cs}^3=\boldsymbol{X}_3+\delta\times\left(\boldsymbol{X}_3-\boldsymbol{X}_\alpha\right)\times s, & \end{cases}
⎩
⎨
⎧Xcs1=X1+δ×(X1−Xα)×s,Xcs2=X2+δ×(X2−Xα)×s,Xcs3=X3+δ×(X3−Xα)×s,
布谷鸟搜索机制概率地丢弃先前更新的位置,并通过随机游走更新:
X
n
e
w
k
=
{
X
c
s
k
+
(
X
i
−
X
j
)
,
i
f
κ
k
>
p
a
,
X
c
s
k
,
i
f
κ
k
≤
p
a
,
f
o
r
k
=
1
,
2
,
3.
\boldsymbol{X}_{new}^k= \begin{cases} \boldsymbol{X}_{cs}^k+(\boldsymbol{X}_i-\boldsymbol{X}_j), & \mathrm{if}\kappa_k>p_a, \\ \boldsymbol{X}_{cs}^k, & \mathrm{if}\kappa_k\leq p_a, & \end{cases}\quad\mathrm{for}k=1,2,3.
Xnewk={Xcsk+(Xi−Xj),Xcsk,ifκk>pa,ifκk≤pa,fork=1,2,3.
GWO核心更新为:
X
(
t
+
1
)
=
X
n
e
w
1
(
t
+
1
)
+
X
n
e
w
2
(
t
+
1
)
+
X
n
e
w
3
(
t
+
1
)
3
X(t+1)=\frac{X_{new}^1(t+1)+X_{new}^2(t+1)+X_{new}^3(t+1)}{3}
X(t+1)=3Xnew1(t+1)+Xnew2(t+1)+Xnew3(t+1)
多种群机制
多种群机制将一个大种群细分为多种群,每个种群包含一组独立的灰狼,这样的分组使得不同种群可以同时在解空间的不同区域进行探索。
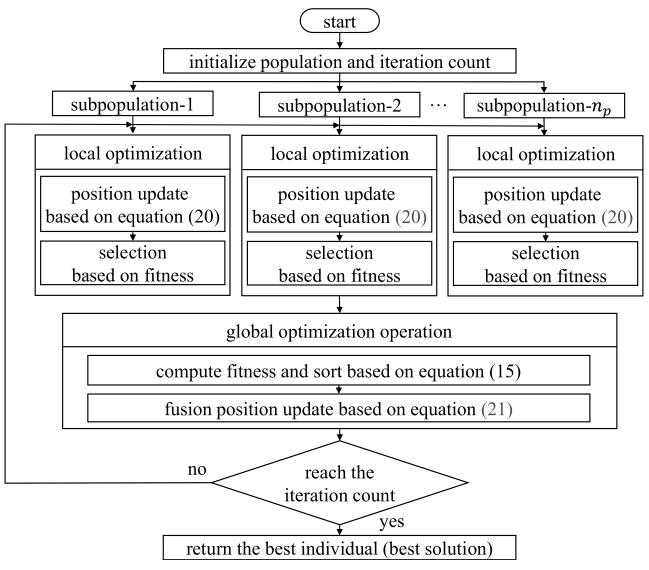
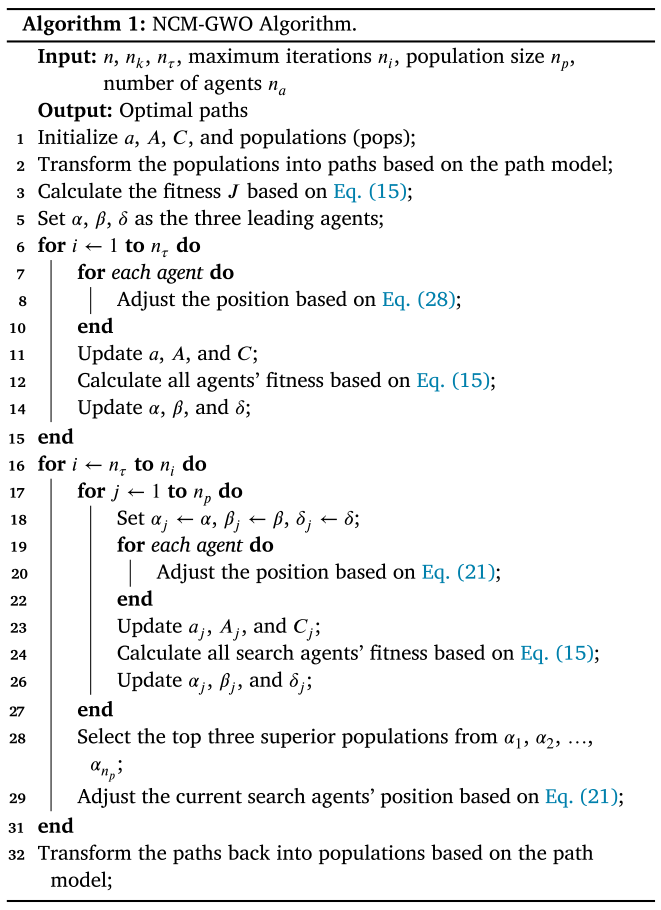
伪代码
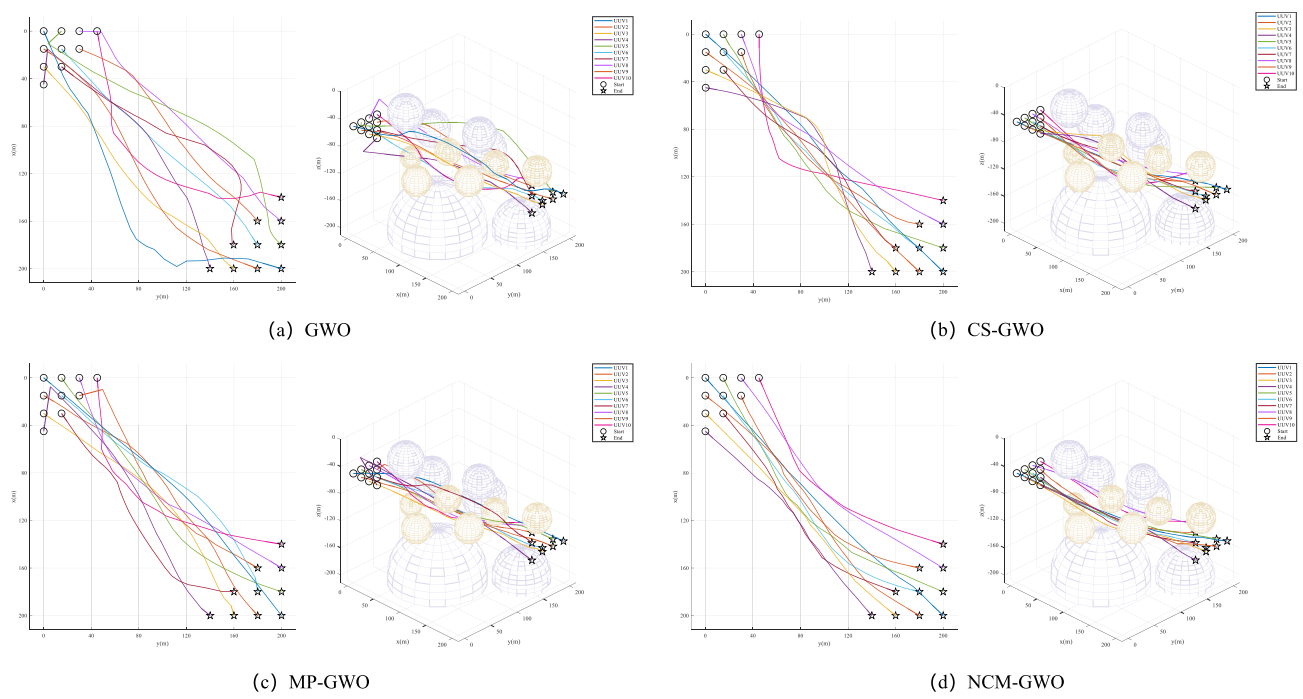
5.结果展示
论文结果,UUV群协同路径规划可做
6.参考文献
[1] Xu H, Xiang X, Yan C, et al. Grey wolf optimization enhanced collaborative path planning for UUV swarms[J]. Ocean Engineering, 2025, 329: 121082.



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











