










1.摘要
在现代工业中,柔性制造系统发挥着不可或缺的作用,而地图建模的精度与连通性对提升AGV运输系统的效率与灵活性至关重要。针对实际制造环境中面临的空间限制、设备故障以及突发任务变更等挑战,本文提出了一种基于六边形网格地图建模的创新型AGV路径规划方法,该方法通过以六边形网格替代传统的方形网格,显著提升了路径规划的连通性、采样频率与安全性。本研究还将改进的蚁群算法与六边形网格地图结合应用于AGV路径规划,算法引入了启发因子,有效避免陷入局部最优。通过将蚁群划分为奇偶两组并采用双向搜索策略,增强了算法的全局探索能力。
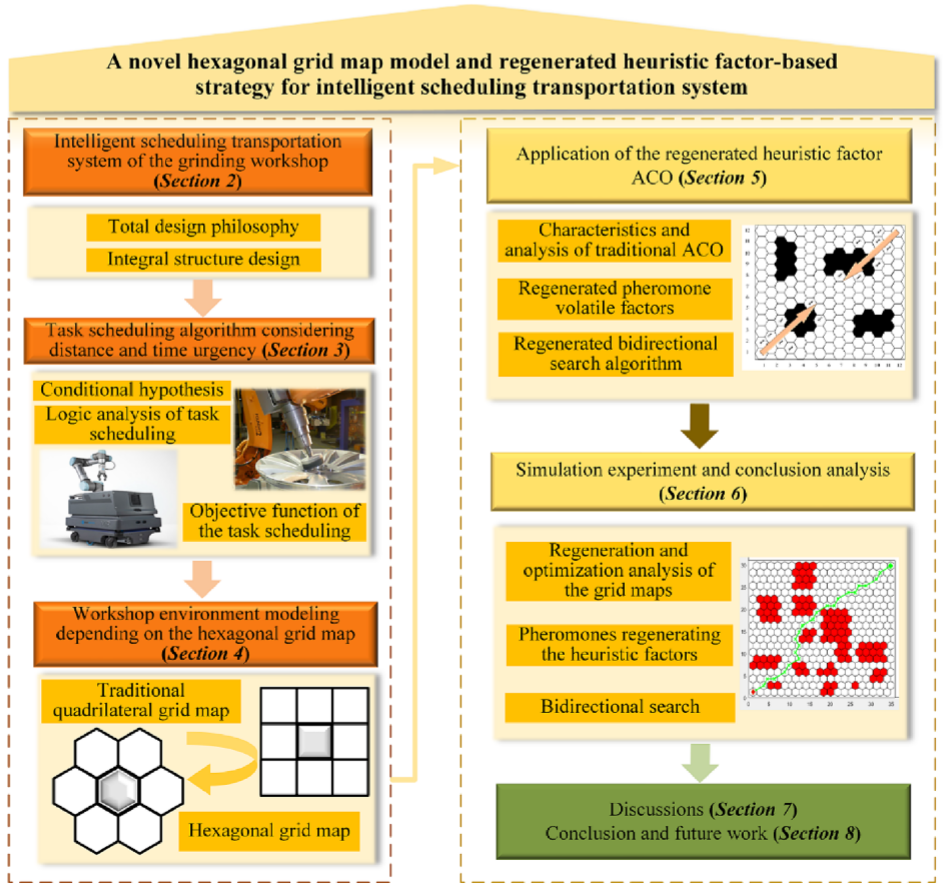
2.六边形网格地图车间建模
地图建模是路径规划中的关键环节,直接影响导航系统的精度、效率及资源利用效率,并在交通运输、自动驾驶和物流管理等领域发挥着重要作用。通过将地理区域划分为规则网格单元,有助于实现空间数据的高效分析与处理。
四边形网格
目前复合机器人环境常用的建模方法包括二维建模、自由空间建模、拓扑建模和网格建模等。网格建模最早由Howden于1968年提出,并广泛应用于AGV路径规划,该方法通过将实际操作环境划分为等大小的网格单元,以数值形式表达环境变量:0表示自由通行区域,1表示障碍区域。障碍物的位置和尺寸在建模时设定为固定值,网格大小则依据AGV的形状和尺寸确定,从而便于对其二维工作空间进行统一规划和编程。网格建模方法结构简单、表达清晰,是路径规划中常用的环境建模手段。
六边形网格
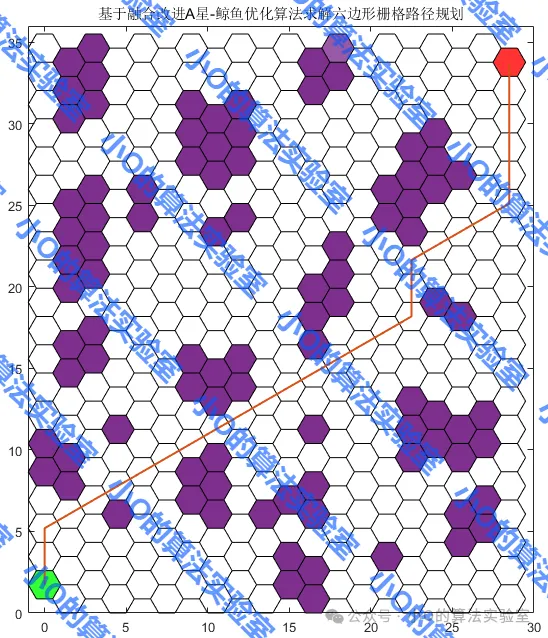
本文采用六边形网格地图建模方法,替代传统的四边形网格方法,用于构建磨削车间的环境模型。根据车间内设备与物品的布局,将工作区域划分为
N
×
N
N\times N
N×N的六边形单元网格,其中
N
N
N表示网格维度。在地图上,AGV需要避开以彩色网格标注的障碍物,这些网格代表磨削车间的边界。AGV在六边形网格地图中被视为一个粒子,通过所建立的模型确保其在运行过程中不会与边界障碍物发生碰撞。
M
a
p
(
i
,
j
)
=
{
1
,
o
b
s
t
a
c
l
e
s
e
x
i
s
t
i
n
g
o
n
r
o
w
i
a
n
d
c
o
l
u
m
n
j
o
n
t
h
e
g
r
i
d
s
,
0
,
o
t
h
e
r
s
.
Map(i,j)=\left\{ \begin{array} {c}1,obstaclesexistingonrowiandcolumnjonthegrids, \\ 0,others. \end{array}\right.
Map(i,j)={1,obstaclesexistingonrowiandcolumnjonthegrids,0,others.
在六边形网格地图中,黑色网格表示数值为1,代表障碍物,AGV无法通过;白色网格表示数值为0,表示通畅区域,AGV可自由行驶。为提升路径规划效率,控制过程中会限制障碍边缘数量,以减少AGV的回溯次数。当障碍边缘的数量超过空白区域数减1时,视为参数不符合规划要求,无法用于有效路径搜索。
3.重构启发式蚁群算法
传统蚁群优化算法虽被广泛应用,但存在初始路径相似、易陷入局部最优、收敛速度慢及对动态环境适应性差等问题。为提升其效率与鲁棒性,本文引入可调节的信息素蒸发因子,以优化搜索过程中信息素的分布,增强探索能力。同时提出一种重构的双向搜索策略,有效提升全局搜索能力,从而更高效地解决复杂路径规划任务。
蚁群优化算法(ACO)是一种受蚂蚁觅食行为启发的仿生算法,其核心特点在于通过信息素引导、正反馈机制与分布式协作来搜索最优路径,该算法最初由Pasteels等人于1987年提出,研究发现蚂蚁在移动过程中会释放信息素,并随着时间逐渐挥发。其他蚂蚁能感知路径上的信息素浓度,并倾向于选择浓度较高的路径,从而不断加强该路径的信息素浓度,形成正反馈效应,使更多蚂蚁汇聚于最优路径。算法执行过程中,每只蚂蚁在选择下一步路径时,会避开已访问过的节点,并将其加入禁忌列表,以提升搜索效率并防止重复路径。
p i j k ( t ) = { τ i j α ( t ) η i j β ∑ j ∈ N j k τ i j α ( t ) η i j β , j ∈ a l l o w e d k , 0 , o t h e r w i s e . p_{ij}^k(t)= \begin{cases} \frac{\tau_{ij}^\alpha(t)\eta_{ij}^\beta}{\sum_{j\in N_j^k}\tau_{ij}^\alpha(t)\eta_{ij}^\beta},j\in allowed_k, \\ \\ 0,otherwise. & \end{cases} pijk(t)=⎩ ⎨ ⎧∑j∈Njkτijα(t)ηijβτijα(t)ηijβ,j∈allowedk,0,otherwise.
信息素更新策略:
τ
i
j
(
t
+
n
)
=
ρ
×
τ
i
j
(
t
)
+
∑
k
=
1
m
Δ
τ
i
j
k
\tau_{ij}(t+n)=\rho\times\tau_{ij}(t)+\sum_{k=1}^m\Delta\tau_{ij}^k
τij(t+n)=ρ×τij(t)+k=1∑mΔτijk
Δ τ i j k = { Q L k , j ∈ a l l o w e d k , 0 , o t h e r w i s e . \Delta\tau_{ij}^k= \begin{cases} \frac{Q}{L_k},j\in allowed_k, \\ \quad0,otherwise. & \end{cases} Δτijk={LkQ,j∈allowedk,0,otherwise.
重构启发因子
传统蚁群算法在初始阶段为各路径分配相同的信息素值,且通常通过引入启发因子 η i j = 1 d i j \eta_{ij}=\frac{1}{d_{ij}} ηij=dij1来提高搜索效率,引导蚂蚁优先选择更接近目标节点的路径。这种方法在一般问题中表现良好,但在大规模或复杂搜索空间中,多个路径可能具有相近的启发值,导致算法难以区分优劣路径,从而降低效率和精度。
为克服这一局限,本文提出了重构启发因子策略,该方法在计算启发信息时,综合考虑蚂蚁从起点到当前位置的累计路径长度与当前位置到目标节点的距离,有效缓解了路径选择的模糊性问题。通过引入更全面的路径信息,重构启发因子提升了算法在大规模搜索环境下的判断能力和全局寻优性能:
η
i
j
′
=
1
p
d
i
s
+
q
d
i
j
+
1
d
i
j
\eta_{ij}^{^{\prime}}=\frac{1}{pd_{is}+qd_{ij}}+\frac{1}{d_{ij}}
ηij′=pdis+qdij1+dij1
其中, η i j ′ \eta_{ij}^{^{\prime}} ηij′为重构启发因子, d i s d_{is} dis为节点 i i i到初始点 s s s的距离, d i j d_{ij} dij为节点 i i i到节点 j j j的距离。
重构双向搜索算法
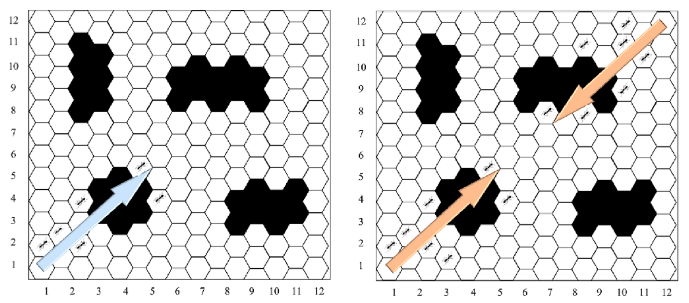
传统蚁群优化算法中,所有蚂蚁均从起点出发寻找通往目标的路径,这种方式容易导致初始路径选择过于集中,限制了算法的全局搜索能力。为提升搜索多样性,本文提出将蚁群分为奇数组与偶数组两类:奇数组蚂蚁从起点出发,按常规路径向目标点前进;偶数组蚂蚁则从终点出发,反向搜索通往起点的路径,该策略有效扩大了搜索范围,显著增强了算法的全局探索能力。
4.网格图优化分析
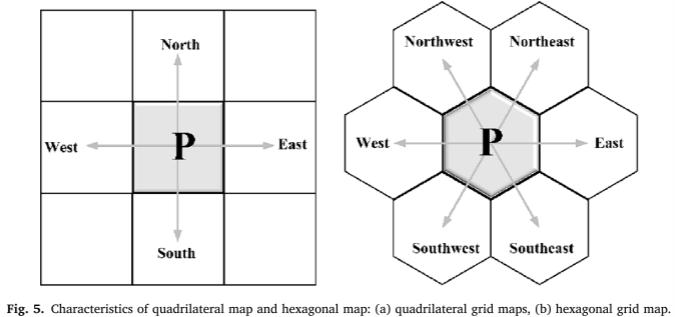
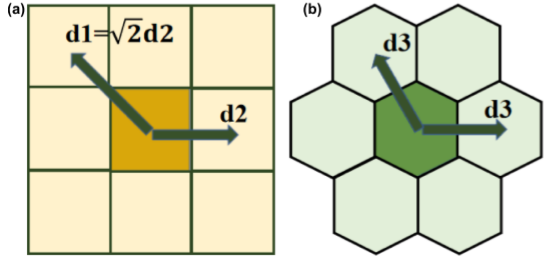
连通性
四边形网格的边和顶点是可共享的,但其中心点与相邻网格的距离分别为 d 1 , d 2 d_1,d_2 d1,d2,其中 d 1 ≠ d 2 d_1\neq d_2 d1=d2,这导致了著名的连通性悖论,即连接性存在不一致的问题。在六边形网格中,各中心点到相邻网格的距离均为 d 3 d_3 d3,说明六边形网格具备良好的连通性。
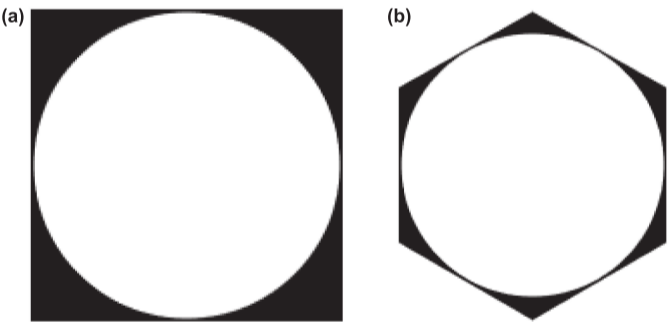
采样频率
六边形网格的形状更接近圆形,相较于四边形网格具有更高的空间填充效率。根据 Mersereau 等人的研究(Mersereau,1979),六边形网格的采样频率比四边形网格高出约13.4%。
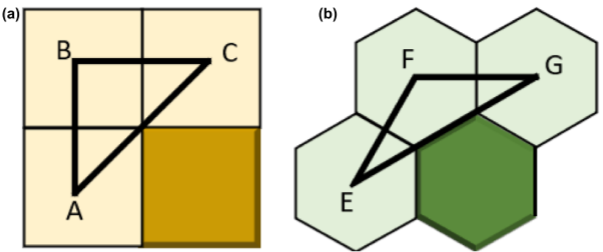
安全性
四边形网格支持向八个方向扩展,每个方向间的旋转角度为45°。图中深色网格表示不可移动的障碍物。在这种设计下,路径规划可能会受到障碍物布局的限制,影响安全性和灵活性。四边形网格中,若路径从点A绕过点B直达点C,虽然路径距离最短,但极易与障碍物边缘相交,存在穿越墙角的风险,导致安全隐患。而在六边形网格中,路径始终沿着网格中心移动,即使在转弯处如点F,也能保持与障碍物至少半个单元的安全距离,有效避免碰撞。
5.结果展示
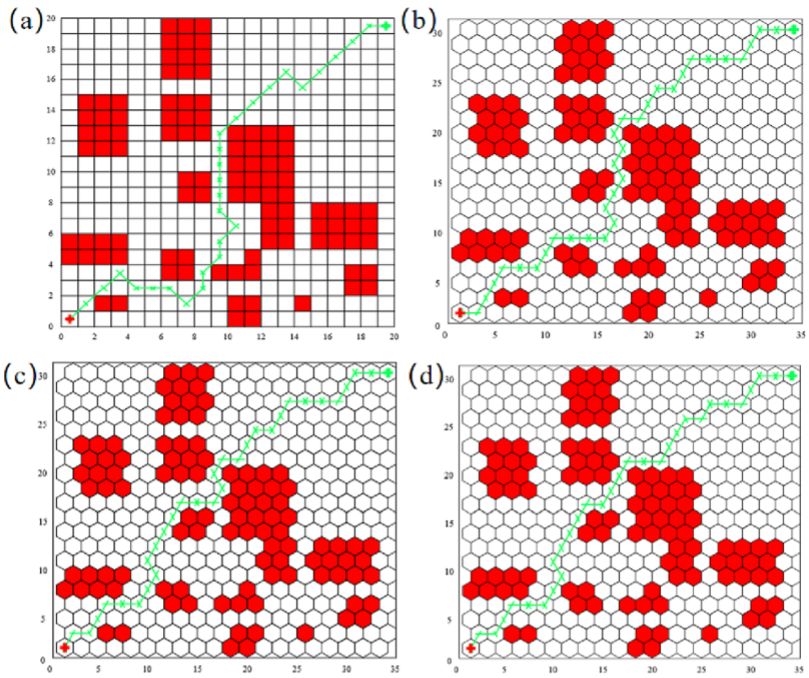
之前做的案例:
PS:应用创新不错,有需要做应用可以联系我~
6.参考文献
[1] Zhang Z, Zhang J, Zhao Y, et al. A novel hexagonal grid map model and regenerated heuristic factor based strategy for intelligent manufacturing system’s AGV path planning problem solving[J]. Computers & Industrial Engineering, 2024, 192: 110154.



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











