







 本文介绍了几个关键的IT技术示例,包括AMR的自主导航案例、jetbot的强化学习实验、物理场景中的模拟演示,以及IsaacExamples中的机械臂路径规划和机器人导入,展示了从理论到实践的技术应用过程。
本文介绍了几个关键的IT技术示例,包括AMR的自主导航案例、jetbot的强化学习实验、物理场景中的模拟演示,以及IsaacExamples中的机械臂路径规划和机器人导入,展示了从理论到实践的技术应用过程。
一、standalone_examples
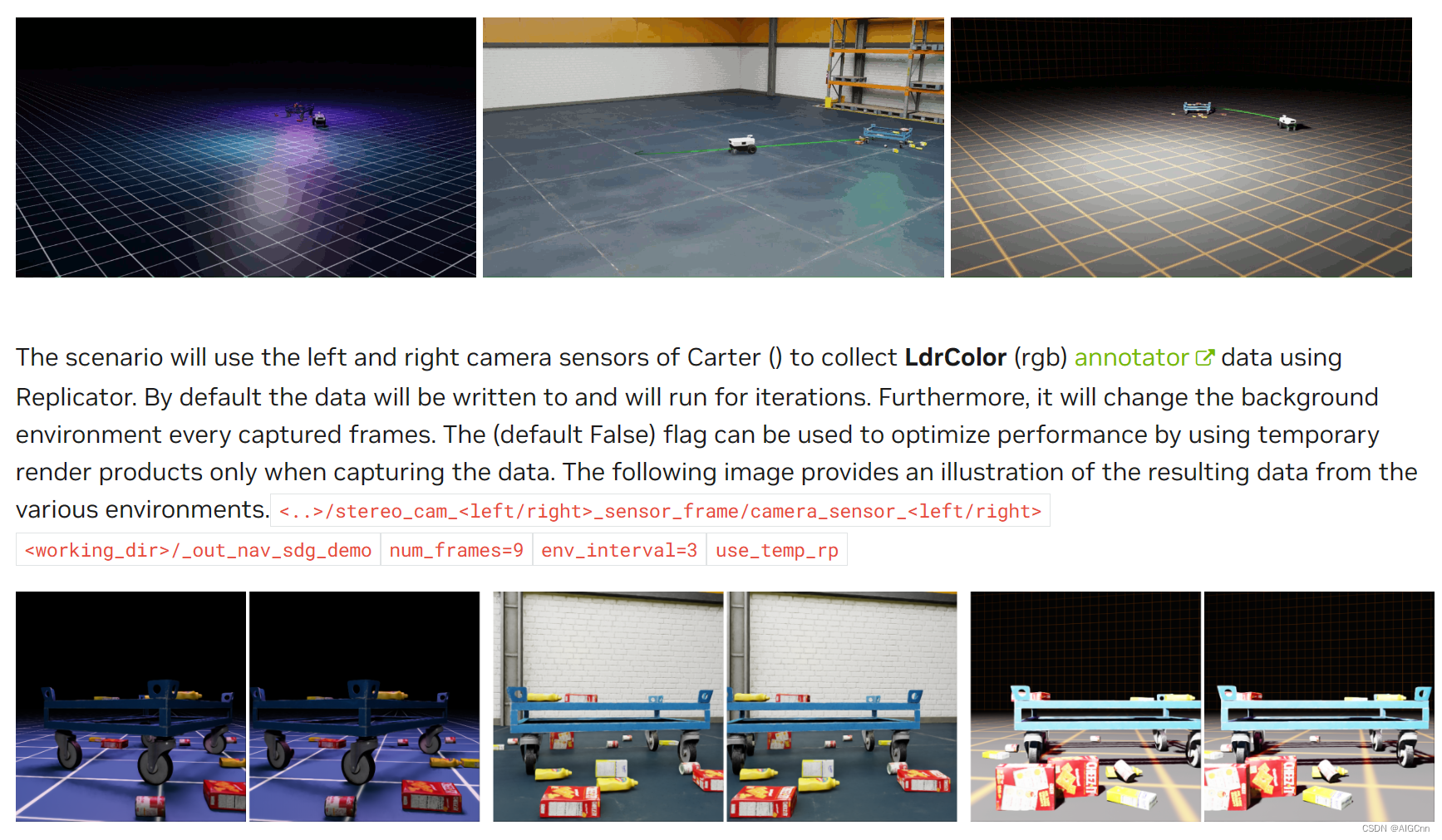
里面有AMR自主导航的例子,jetbot强化学习的例子等等;
二、 Simulated -> Demo Scenes (physics demo scenes)
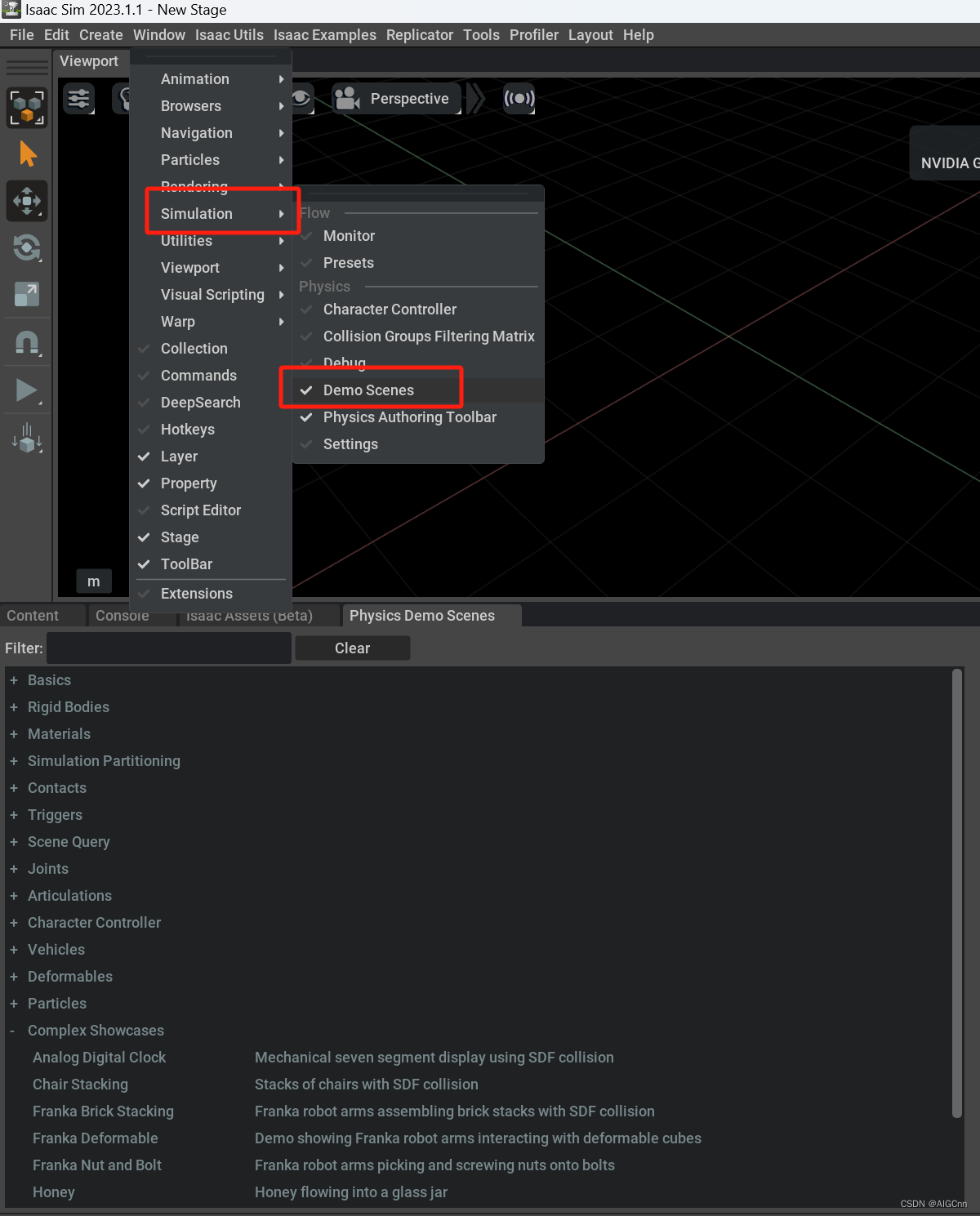
这个里面有很多物理场景演示,如各种形态车辆,关节机器人,还有一些综合复杂的例子,如乐高汽车,可以用键盘手柄控制,带引擎声音和速度策略,在沙漠场景里运行
三、Isaac Examples
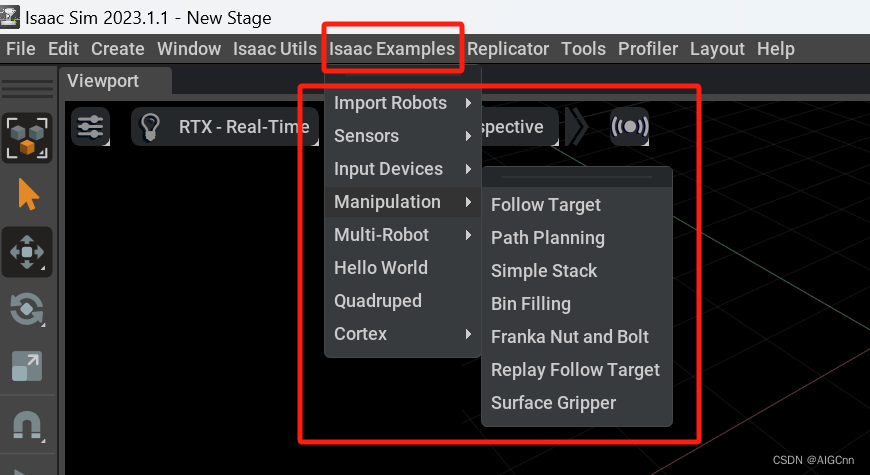
这里有很多机械臂路径规划的例子,以及如何导入机器人等;
一、standalone_examples
里面有AMR自主导航的例子,jetbot强化学习的例子等等;
二、 Simulated -> Demo Scenes (physics demo scenes)
这个里面有很多物理场景演示,如各种形态车辆,关节机器人,还有一些综合复杂的例子,如乐高汽车,可以用键盘手柄控制,带引擎声音和速度策略,在沙漠场景里运行
三、Isaac Examples
这里有很多机械臂路径规划的例子,以及如何导入机器人等;
 6544
6544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























