







前言:
本文基于之前进行一次整理的调研工作(不过现在基本上每个框架我也都用过),想着写的还挺详细的整理一下分享
不过肯定还要很多疏漏和不足之处,还多多望批评指正!
Orbit vs Gym
issac lab的framework 实际上是orbit的,但是isaac sim update到了4.0所以原来siaac sim 2023.1.1上面的orbit迁到isaac sim4.0变成了isaac lab

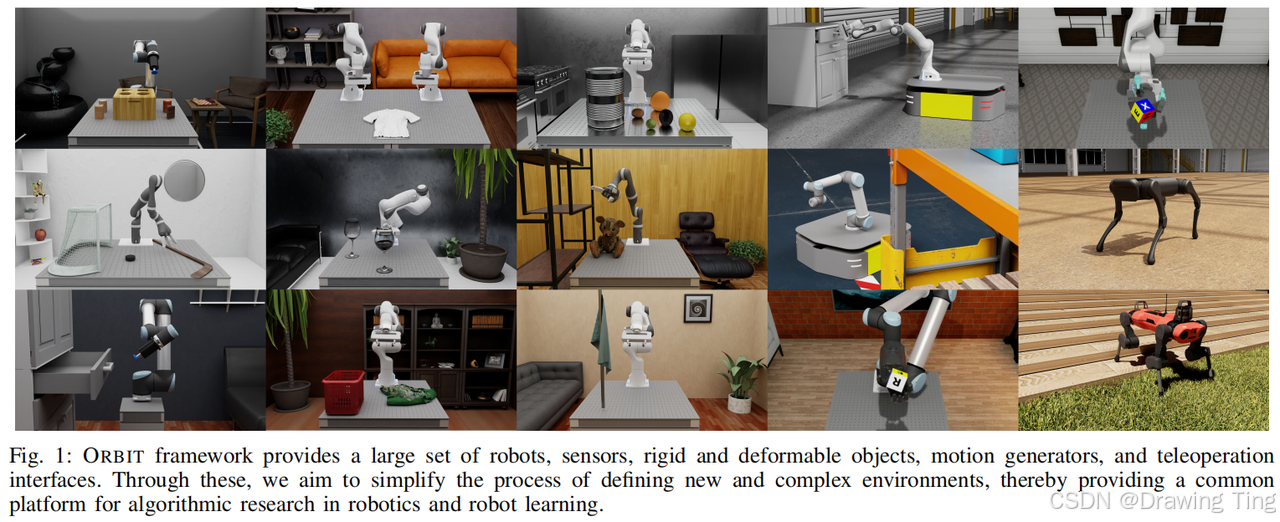
Orbit采用模块化设计,可通过逼真的场景和快速准确的刚体和变形体模拟,轻松高效地创建机器人环境。通过 ORBIT,我们提供了一套难度各异的基准任务–从单步开柜和折布到多步任务(如房间重组)。为了支持不同的观察和行动空间,我们将固定手臂和移动机械手与不同的物理传感器和运动发生器结合在一起。借助基于 GPU 的并行化技术,ORBIT 可在几分钟内从手工或专家解决方案中训练强化学习策略和收集大型演示数据集。总之,我们提供了一个开源框架,其中包含 16 种机器人平台、4 种传感器模式、10 种运动发生器、20 多个基准任务以及 4 个学习库的封装程序。通过这个框架,我们旨在支持各种研究领域,包括表征学习、强化学习、模仿学习以及任务和运动规划。
统一模块化
orbit的统一模块化设计使得创建具有逼真场景和高保真度的机器人环境变得简单高效(不过得在熟悉各种接口的基础上才会简单
ORBIT的模块化特性使其易于扩展
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 4855
4855

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











