







目录
前言
前面我们在《AVL-Cruise纯电动汽车仿真建模教程-能量回收策略的实现》一文中讲解了通过Cruise 软件的Function模块实现串联能量回收的方法。
Cruise 软件的Function模块支持C语言与RPN-Formula,可以实现一些简单策略的搭建。但Function模块的代码不能太长,对于较复杂的控制逻辑,通常需要拆分成多个Function模块。此外,就是输入输出都以数组的形式,对于存在较多输入输出的策略通常需要反复查看信号描述。简而言之,对于较为负杂的控制策略,Cruise的Function模块不是一种友好的解决方案。而由于Cruise与Simulink之间友好的交互性能,Cruise+Simulink联合仿真成为复杂仿真模型开发中被广泛应用的解决方案。本文以《AVL-Cruise纯电动汽车仿真建模教程-能量回收策略的实现》中的串联能量回收策略为例,讲解其在simulink软件中的实现方法。
1. 整车控制策略模型搭建及信号说明
1.1信号说明
本模型策略主要实现电制动优先的能量回收策略,控制策略模型如下图所示
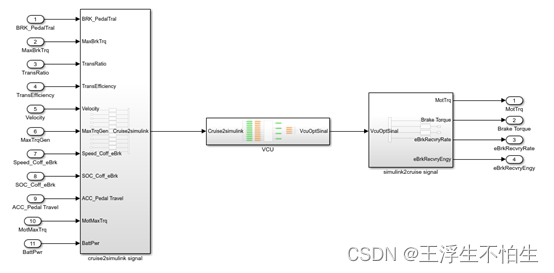
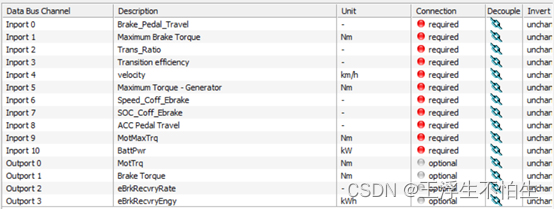
本仿真模型使用的策略模型基于MATLAB/Simulink平台搭建完成,通过C++编译器编译成dll文件给CRUISE引用,实现联合仿真。MATLAB dll中设置控制策略的输入输出接口信息具体如下表所示:
控制策略的输入接口信息:
| 信号来源 | 信号名称 | 信号描述 |
| CRUISE输出 | Brake_Pedal_Travel | 制动踏板开度 |
| CRUISE输出 | Maximum Brake Torque | 制动系统最大制动扭矩 |
| CRUISE输出 | Trans_Ratio | 减速器速比 |
| CRUISE输出 | Transition efficiency | 减速器效率 |
| CRUISE输出 | velocity | 车速 |
| CRUISE输出 | Maximum Torque - Generator | 电机制动外特性 |
| CRUISE输出 | Speed_Coff_Ebrake | 能量回收车速修正系数 |
| CRUISE输出 | SOC_Coff_Ebrake | 能量回收SOC修正系数 |
| CRUISE输出 | ACC Pedal Travel | 加速踏板开度 |
| CRUISE输出 | MotMaxTrq | 电机驱动外特性 |
| CRUISE输出 | BattPwr | 电池当前放电功率 |
控制策略的输出接口信息:控制策略的输出接口信息:
| 信号来源 | 信号名称 | 信号描述 |
| MATLAB dll输出 | MotTrq | 电机需求扭矩 |
| MATLAB dll输出 | Brake Torque | 制动系统扭矩 |
| MATLAB dll输出 | eBrkRecvryRate | 制动能量回收率 |
| MATLAB dll输出 | eBrkRecvryEngy | 制动回收能量 |
1.2模型策略搭建说明
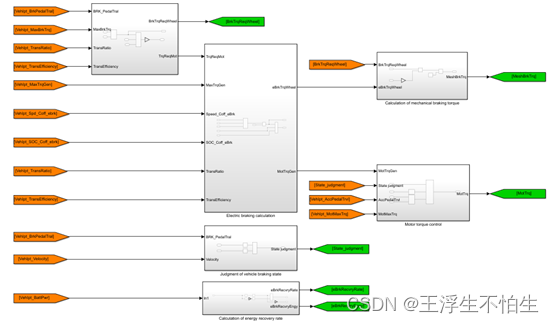
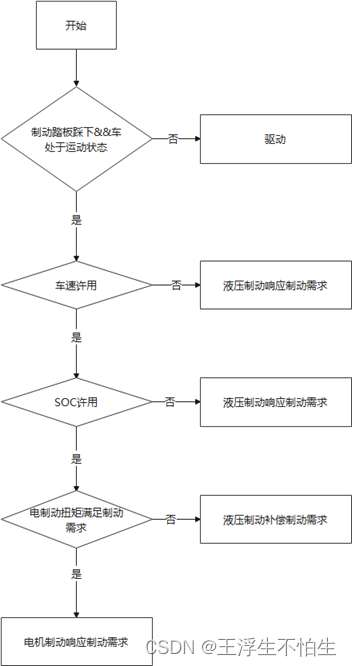
策略内容同前文《AVL-Cruise纯电动汽车仿真建模教程-能量回收策略的实现》:当车辆处于制动状态时,将轮端制动力计算至电机端,判断电机是否满足制动力需求,若满足则采用电制动,不满足则优先采用电制动剩余制动力需求由机械制动补足。同时通过监测SOC及车速控制能量回收许用状态,高SOC及低速状态下禁用能量回收。
当车辆未处于制动状态时,电机处于驱动模式,电机驱动需求扭矩等于加速踏板开度*电机外特性。
逻辑图如下图所示。
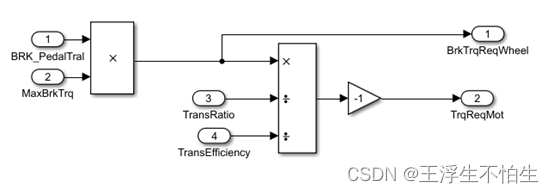
整车制动需求扭矩计算。
通过驾驶员制动踏板开度计算整车制动扭矩需求,并计算出当前状态下的电机端电制动扭矩需求。
整车制动扭矩需求=制动踏板开度*整车最大制动扭矩
电机端制动需求=整车制动扭矩需求/速比/传动效率
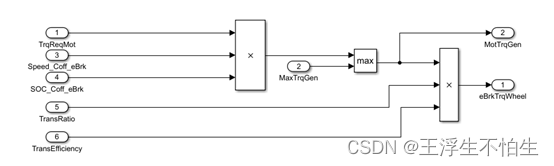
电制动扭矩计算
取当前制动状态下电机端的制动扭矩需求、电机最大制动扭矩两者最小值(注意该处电制动扭矩值为负值,故模型中采用max),其中电机端的制动扭矩需求:MotTrqGen=TrqReqMot*速度修正系数*SOC修正系数
轮端电制动扭矩= MotTrqGen*速比*机械传动效率
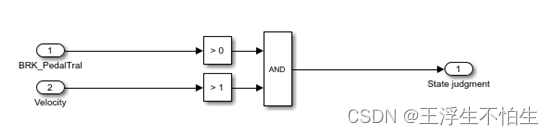
车辆制动状态判断
判断车辆是否处于制动状态,条件:车速>1且制动踏板开度>0
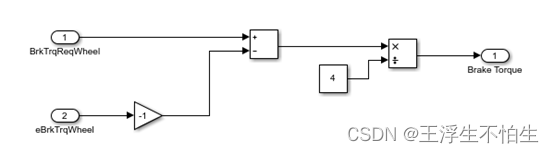
机械制动扭矩计算
机械制动扭矩=(轮端制动扭矩需求-轮端电制动扭矩)/4
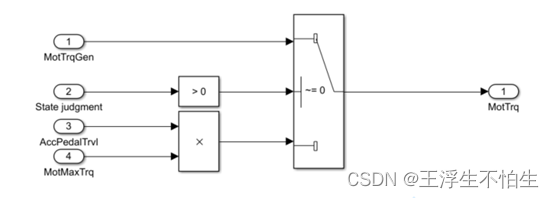
电机状态控制
当车辆处于制动状态时,输出上述策略计算内容,当处于驱动状态时,输出为电机驱动扭矩。
电机驱动扭矩=加速踏板开度*电机最大扭矩
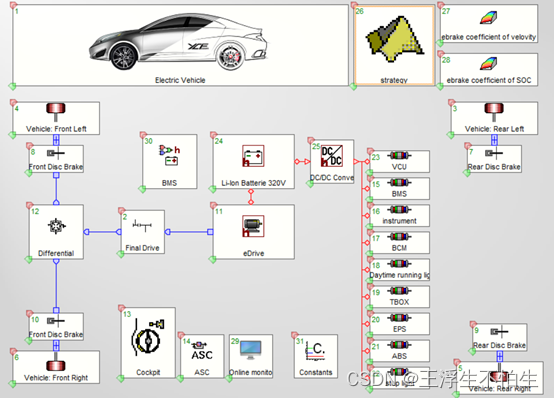
2.Cruise端车辆模型
Cruise端车辆模型建立如下,与采用Function搭建策略方式不同的是,模型采用DLL模块与simulink策略进行交互。
Matlab DLL模块中的输入输出接口配置需与Simulink配置一致,如下所示:
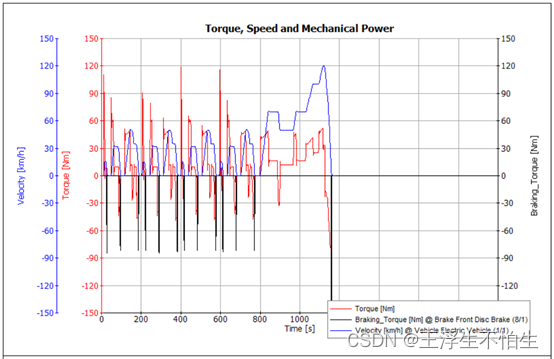
通过cycle run建立NEDC仿真任务,在一个循环工况下的电机扭矩和液压制动扭矩如下图所示:模型车速跟随良好,在车辆存在制动需求时,优先由电机提供制动扭矩,在低速时电制动逐渐退出,液压制动介入补偿。
结语
本文以串联制动能量回收策略为例,介绍了通过cruise+simulink联合仿真方式的实现方法。
需要注意的是,本文旨在探讨通过联合仿真的方式实现能量回收的建模思路,在建立模型的过程中忽略了若干限制条件,如电制动与液压制动的合理分配、BMS的充放电功率限制、电机功率限制等,对于工程项目而言本文所述模型并不具备所需精度,请勿直接使用。
本文由“王浮生不怕生”原创,拒绝任何形式的抄袭及转载!
关注同名公众号,获取模型。

















 1983
1983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









