







首先要明白开环系统和闭环系统,前四讲围绕机器人定量和定性分析展开,但都是原系统,没有加入软硬件设计。对原系统分析为了更好理解系统并进行控制,进一步扩展到本节,极点配置就是典型的反馈控制结构设计。
如果系统性能不能满足要求,就需要依据需求设计控制器,本节主要分为如下五个部分:
先简单解释一下什么是极点配置,然后举一些硬件和软件配置的案例,接着说明极点配置与系统稳定的关系,稳定性和动态平衡,最后介绍一个案例。
配图为自动平衡的自行车,静态需要支点,动态靠自身控制装置保持平衡,酷……
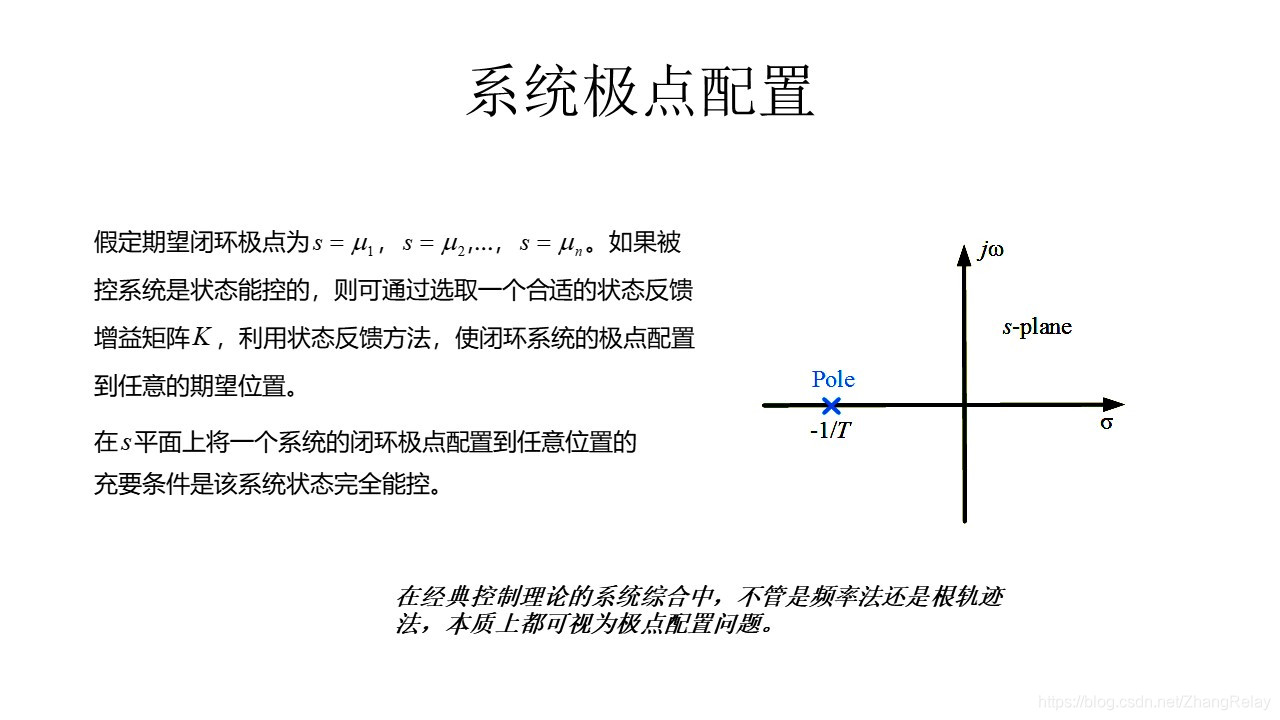
如果原系统有右半平面的极点,需要配置到左半平面,全部都需要配置。
以自平衡机器人为例:
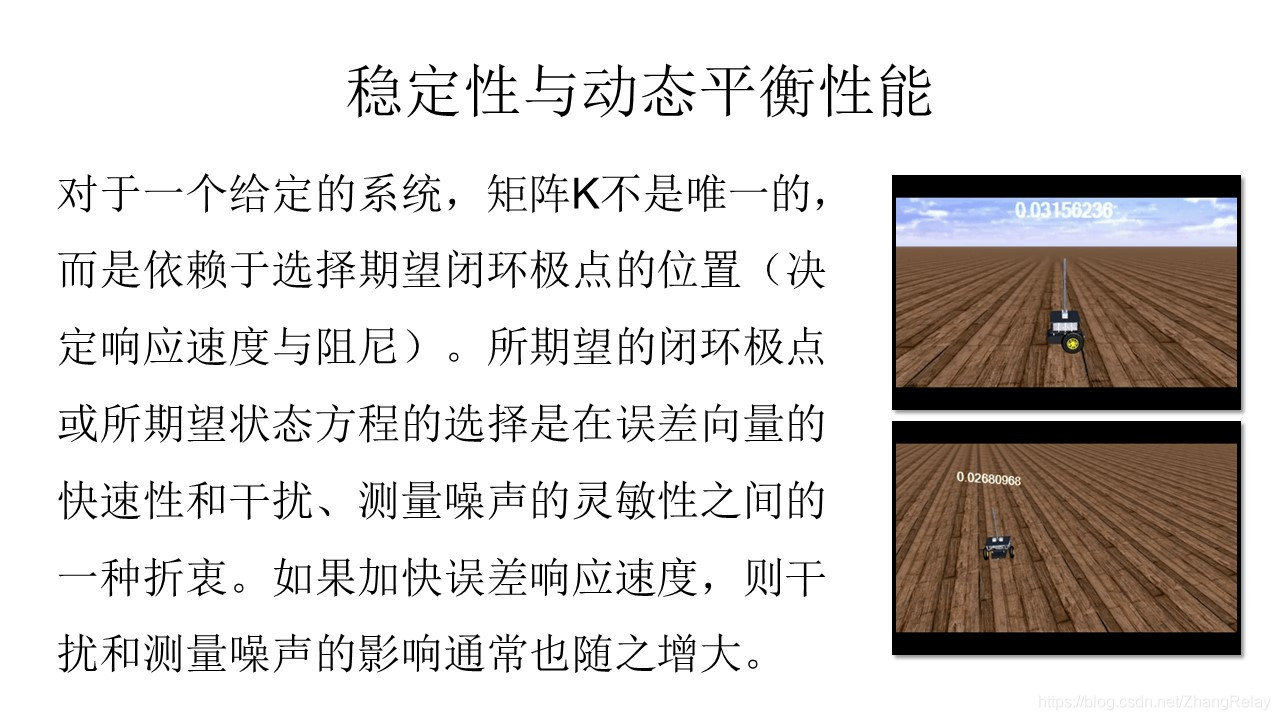
从[0, 2.4617, -2.4617, 0]到[-8.7771 + 0.0000i, -1.5899 + 0.1907i, -1.5899 - 0.1907i, -1.3746 + 0.0000i]。
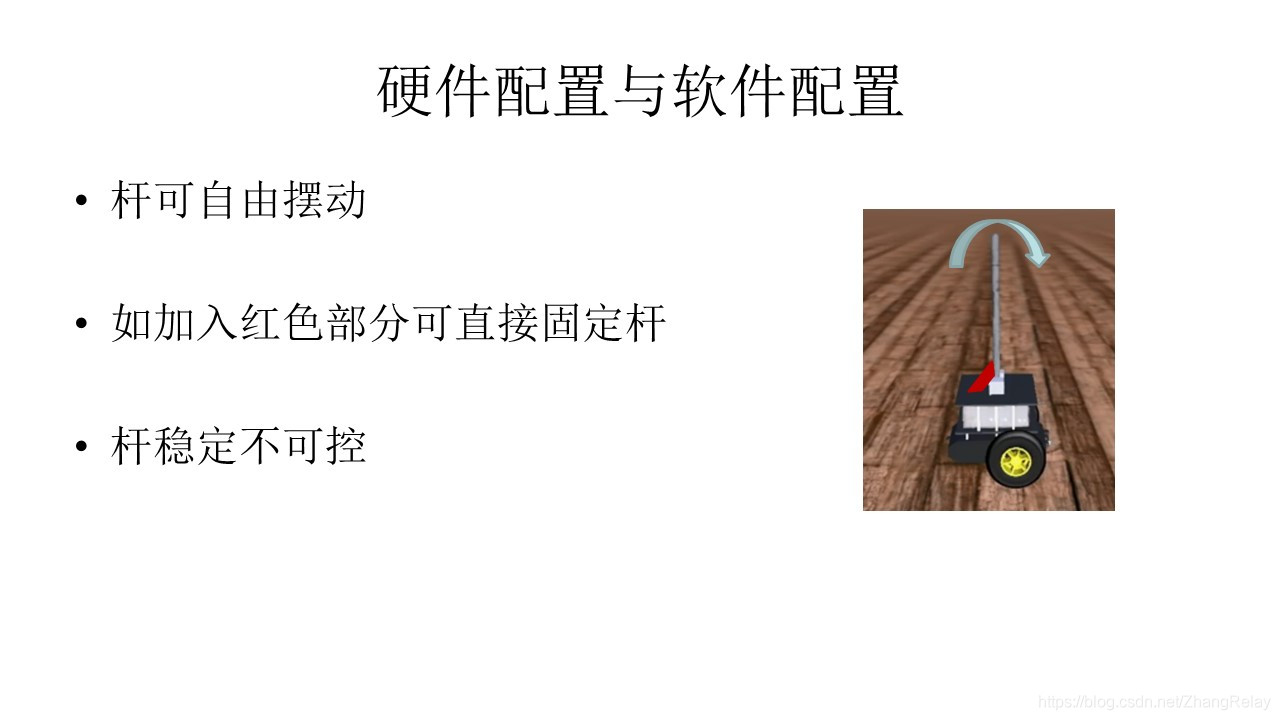
机械方式
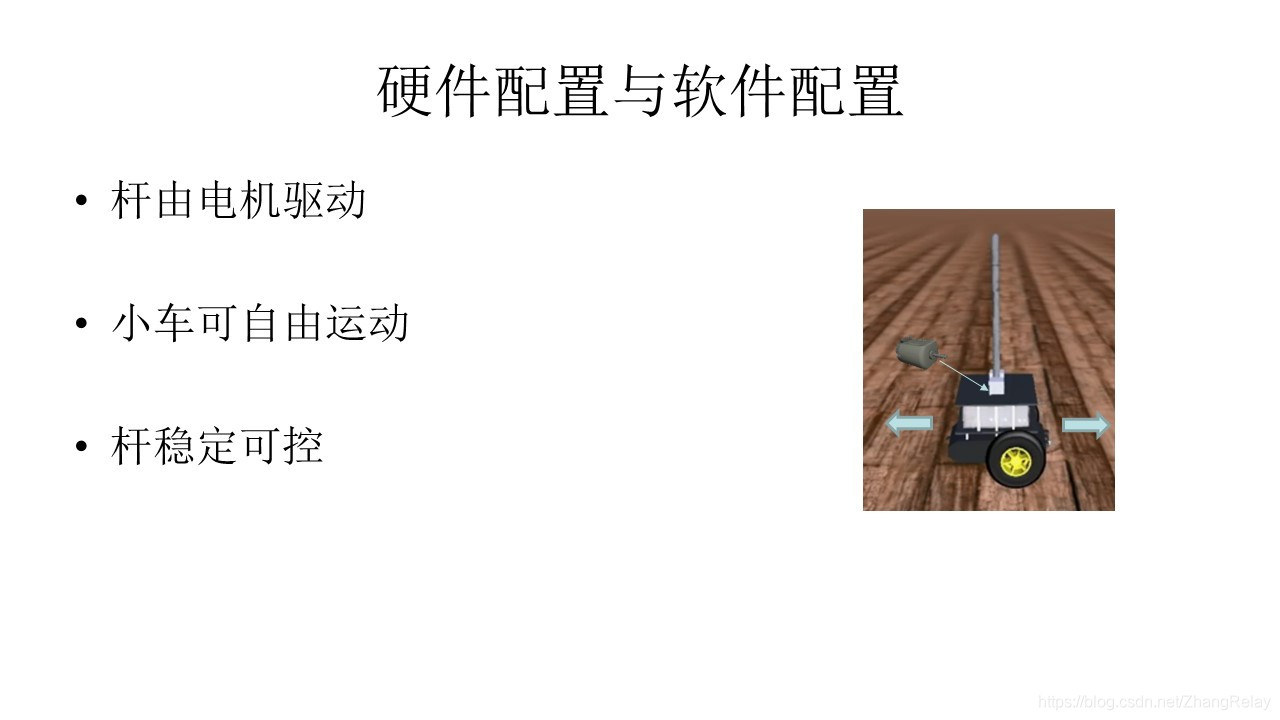
电机方式
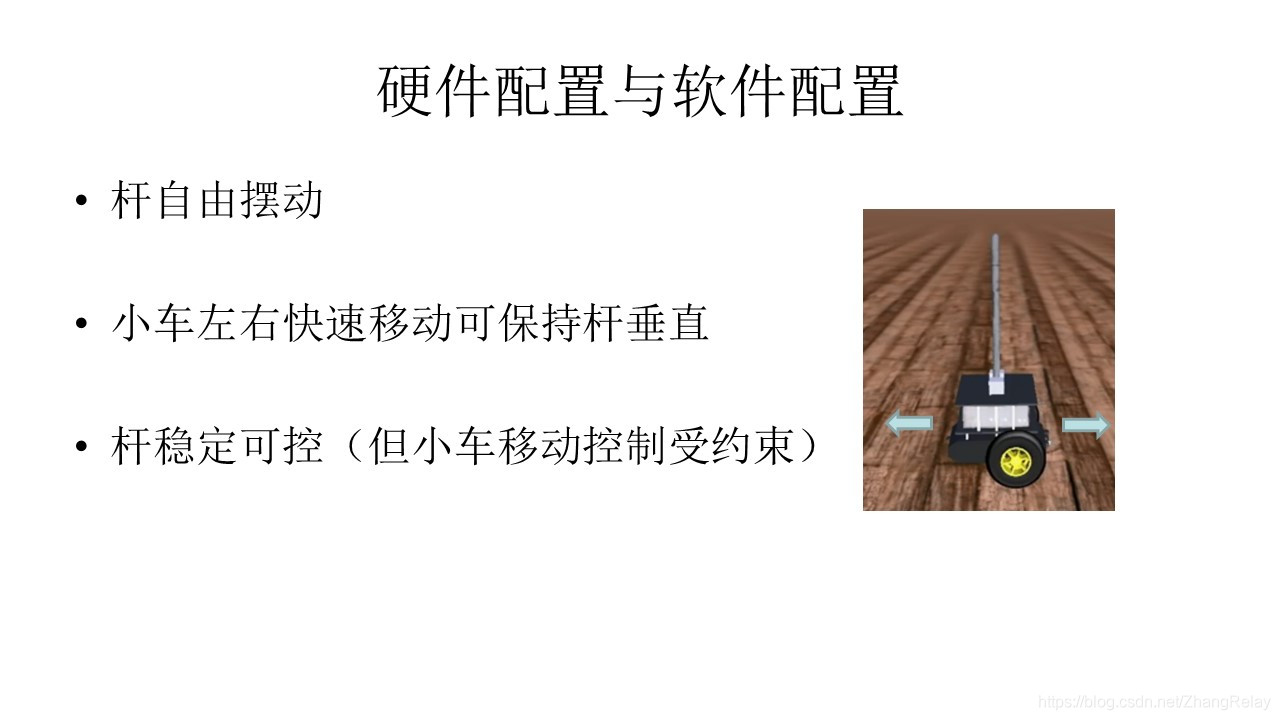
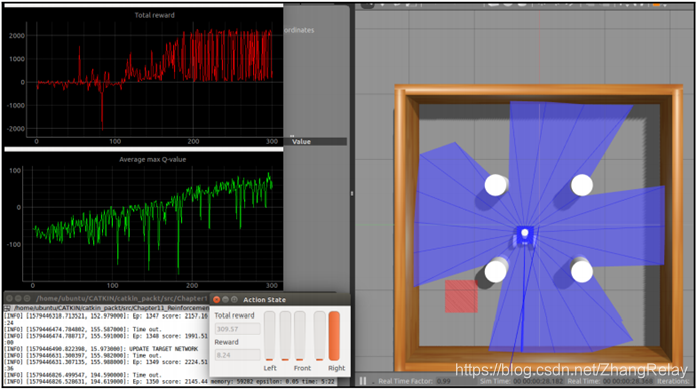
控制算法模式(本讲重点采用)
具体参考:https://blog.csdn.net/ZhangRelay/article/details/108700367
在github上有源码可以下载阅读,多多学习多多编程,才能真正掌握现代控制工程等实践。
当然也可以加入OpenAI方式进行训练学习,倒立摆或者环境自由探索等。
这不属于现代控制理论范围的知识点了,有空再细细介绍吧。或可参考:


















 1345
1345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











