






截图:
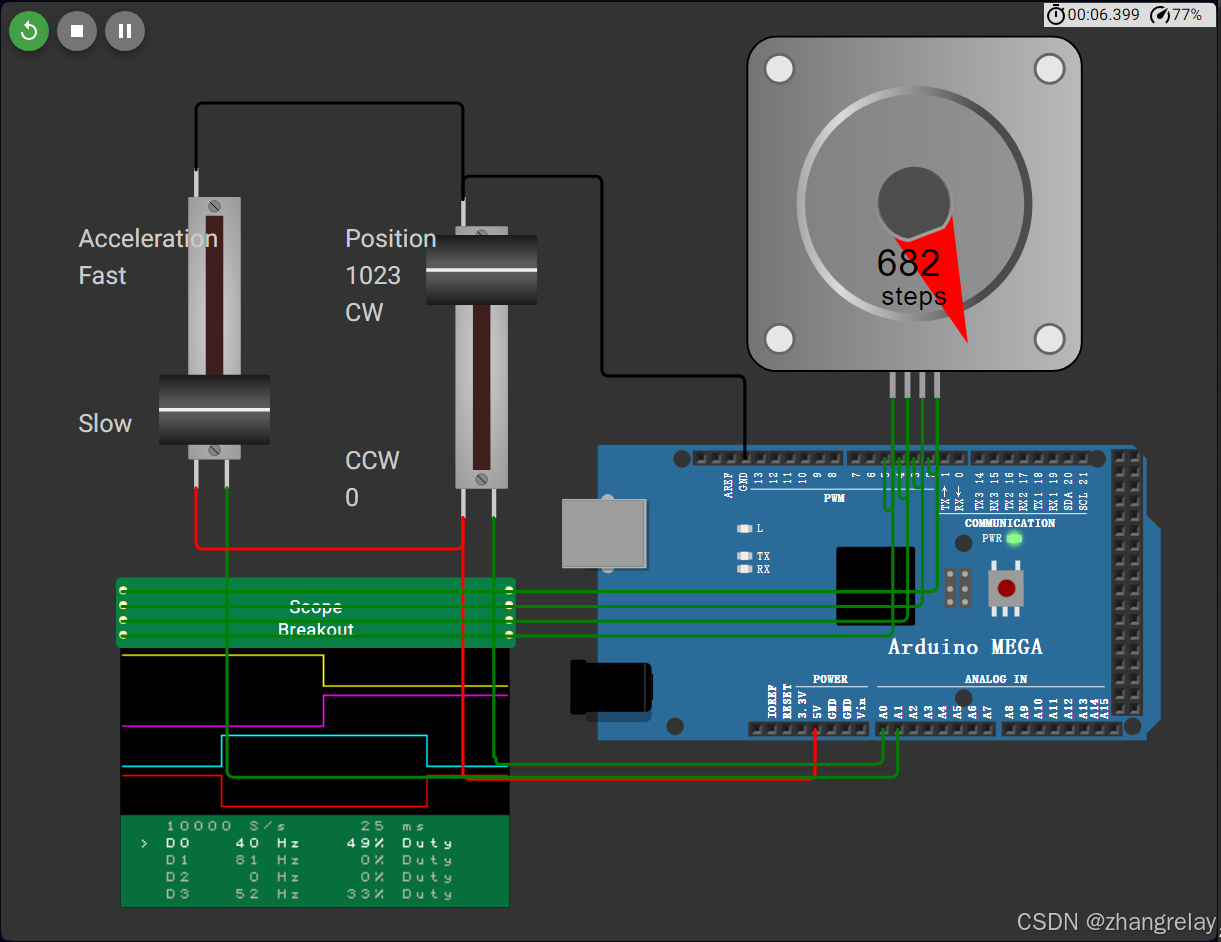
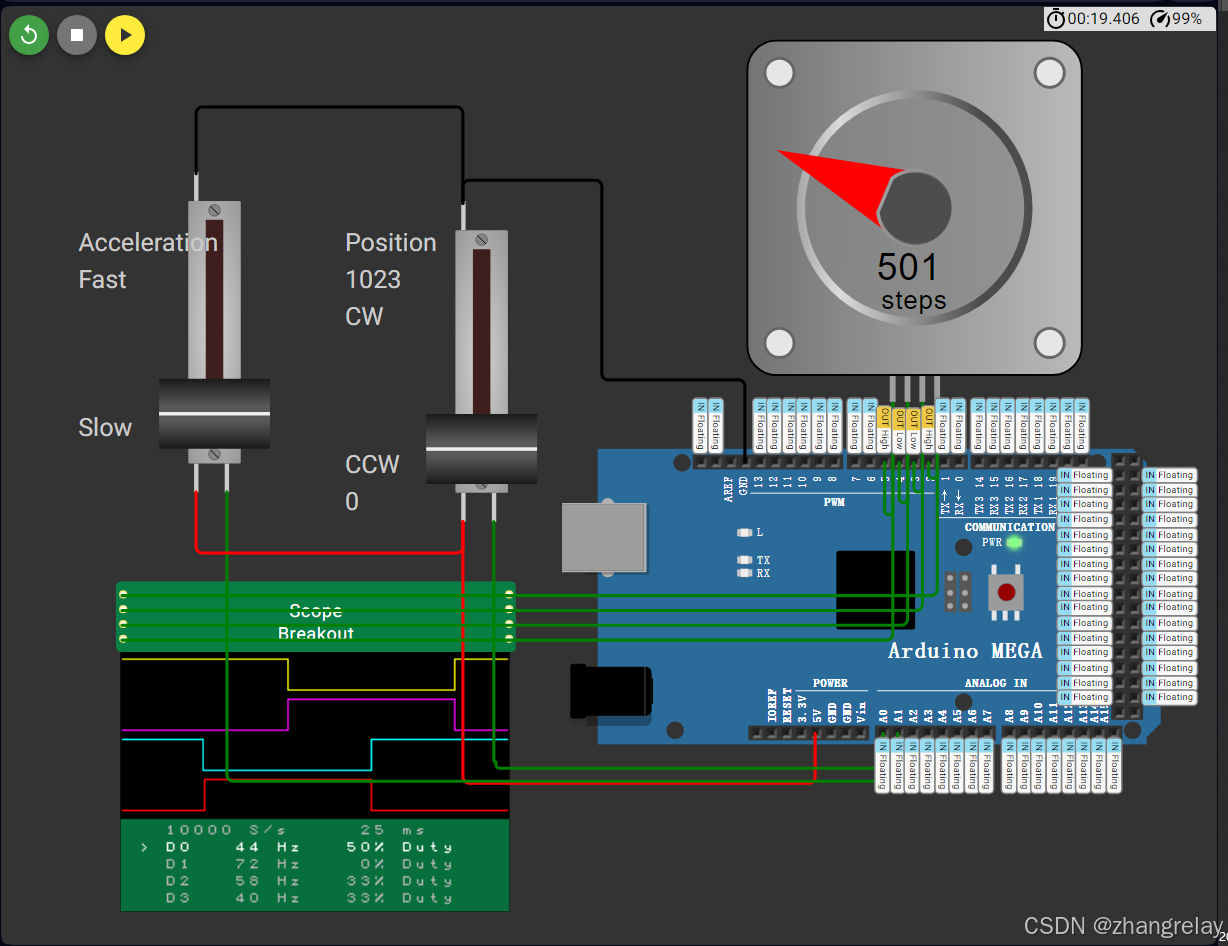
链接:
https://wokwi.com/projects/415868253118281729代码:
#include <AccelStepper.h>
// Define a stepper and the pins it will use
AccelStepper stepper; // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5
// This defines the analog input pin for reading the control voltage
// Tested with a 10k linear pot between 5v and GND
const byte PositionPot = A0;
const byte AccelerationPot = A1;
void setup()
{
stepper.setMaxSpeed(1000);
stepper.setAcceleration(35);
}
void loop()
{
// Read new position
int analog_in = analogRead(PositionPot);
stepper.setAcceleration(analogRead(AccelerationPot));
stepper.moveTo(analog_in);
stepper.run();
}逐行注释与详细分析
cpp
#include <AccelStepper.h>
注释: 包含 AccelStepper 库,该库用于控制步进电机,提供加速和减速功能。
分析: 这是一个常用的步进电机控制库,简化了步进电机的控制过程。
cpp
// Define a stepper and the pins it will use
AccelStepper stepper; // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5
注释: 定义一个 AccelStepper 对象 stepper,默认使用 4 线全步模式,连接到引脚 2, 3, 4, 5。
分析: 默认情况下,AccelStepper 使用 4 线全步模式。如果硬件连接不同,需要调整构造函数参数。
cpp
// This defines the analog input pin for reading the control voltage
// Tested with a 10k linear pot between 5v and GND
const byte PositionPot = A0;
const byte AccelerationPot = A1;
注释: 定义两个模拟输入引脚 PositionPot 和 AccelerationPot,分别连接到电位器,用于读取位置和加速度控制电压。
分析: 使用电位器作为输入设备,可以灵活调整步进电机的目标位置和加速度。
cpp
void setup()
{
stepper.setMaxSpeed(1000);
stepper.setAcceleration(35);
}
注释: 在 setup() 函数中设置步进电机的最大速度和加速度。
分析: setMaxSpeed(1000) 设置步进电机的最大速度为 1000 步/秒。setAcceleration(35) 设置步进电机的加速度为 35 步/秒²。这些参数可以根据实际需求调整。
cpp
void loop()
{
// Read new position
int analog_in = analogRead(PositionPot);
stepper.setAcceleration(analogRead(AccelerationPot));
stepper.moveTo(analog_in);
stepper.run();
}
注释: 在 loop() 函数中持续读取电位器的值,设置步进电机的加速度和目标位置,并运行步进电机。
分析:
analogRead(PositionPot) 读取电位器的值,范围为 0 到 1023,作为步进电机的目标位置。
stepper.setAcceleration(analogRead(AccelerationPot)) 根据另一个电位器的值设置步进电机的加速度。
stepper.moveTo(analog_in) 设置步进电机的目标位置。
stepper.run() 运行步进电机,使其移动到目标位置。
改进方案
引脚配置灵活性:
当前代码默认使用 4 线全步模式,并硬编码了引脚。可以通过构造函数参数或配置文件来设置引脚和步进模式,提高代码的灵活性。
输入范围映射:
电位器的读取值范围为 0 到 1023,但步进电机的实际位置可能需要映射到不同的范围。可以使用 map() 函数将电位器的值映射到步进电机的实际位置范围。
加速度范围限制:
电位器的值直接用于设置加速度,可能导致加速度过大或过小。可以添加范围限制,确保加速度在合理范围内。
代码结构优化:
将读取电位器值和设置步进电机参数的代码封装成函数,提高代码的可读性和可维护性。
错误处理:
添加错误处理机制,如检查电位器是否连接正常,处理读取失败的情况。
调试信息:
添加串口输出调试信息,如当前位置、目标位置、加速度等,方便调试和监控。
改进后的代码示例
cpp
#include <AccelStepper.h>
// Define stepper motor interface type and pins
#define STEPPER_INTERFACE_TYPE AccelStepper::FULL4WIRE
#define STEPPER_PIN1 2
#define STEPPER_PIN2 3
#define STEPPER_PIN3 4
#define STEPPER_PIN4 5
AccelStepper stepper(STEPPER_INTERFACE_TYPE, STEPPER_PIN1, STEPPER_PIN2, STEPPER_PIN3, STEPPER_PIN4);
const byte PositionPot = A0;
const byte AccelerationPot = A1;
void setup()
{
Serial.begin(9600); // Initialize serial communication for debugging
stepper.setMaxSpeed(1000);
stepper.setAcceleration(35);
}
void loop()
{
int analog_in = analogRead(PositionPot);
int mapped_position = map(analog_in, 0, 1023, 0, 1000); // Map position to 0-1000 steps
int acceleration = analogRead(AccelerationPot);
int clamped_acceleration = constrain(acceleration, 10, 100); // Clamp acceleration to 10-100 steps/s²
stepper.setAcceleration(clamped_acceleration);
stepper.moveTo(mapped_position);
stepper.run();
// Debug output
Serial.print("Current Position: ");
Serial.print(stepper.currentPosition());
Serial.print(" Target Position: ");
Serial.print(mapped_position);
Serial.print(" Acceleration: ");
Serial.println(clamped_acceleration);
}
改进点总结
引脚配置灵活性: 通过定义引脚和接口类型,提高了代码的灵活性。
输入范围映射: 使用 map() 函数将电位器的值映射到步进电机的实际位置范围。
加速度范围限制: 使用 constrain() 函数限制加速度的范围。
代码结构优化: 将读取电位器值和设置步进电机参数的代码封装在 loop() 函数中,并添加了调试信息输出。
调试信息: 通过串口输出当前位置、目标位置和加速度,方便调试和监控。wokwi arduino mega 2560 - 步进电机的原理与应用研究报告
摘要
本报告详细探讨了步进电机的原理及其在wokwi平台上的Arduino Mega 2560开发板中的应用。通过具体代码实现,分析了步进电机的控制方法,包括位置控制和加速度控制,并给出了代码的优化方案。报告还介绍了步进电机的基本原理、分类、特点以及其在工业自动化、智能家居等领域的应用。
1. 引言
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机,具有高精度、高可靠性、良好的启停和反转响应等特点。随着嵌入式系统的发展,步进电机在工业自动化、机器人技术、智能家居等领域得到了广泛应用。本报告以wokwi平台上的Arduino Mega 2560开发板为例,研究步进电机的控制原理及应用。
2. 步进电机原理
2.1 工作原理
步进电机的工作原理基于电磁感应现象。其转子周围均匀分布有电磁铁,通过控制电磁铁的通断电顺序,使转子按照预定的步距角转动。每输入一个脉冲信号,转子就转动一个固定的角度或前进一步,因此步进电机的输出角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
2.2 分类与特点
步进电机根据极性和转子磁性可以分为单极性步进电机和双极性步进电机,以及永磁式步进电机、反应式步进电机和混合式步进电机等。不同类型的步进电机具有不同的特点和应用场景。例如,双极性步进电机输出扭矩高,但控制电路相对复杂;混合式步进电机则结合了永磁式和反应式步进电机的优点,具有高精度、高响应和低振动等特点。
3. Arduino Mega 2560与步进电机控制
3.1 Arduino Mega 2560简介
Arduino Mega 2560是一款基于ATmega2560微控制器的开源电子原型平台,具有54路数字输入/输出引脚、16路模拟输入引脚、4路UART接口等丰富的硬件资源。其强大的处理能力和丰富的接口使其成为控制步进电机的理想选择。
3.2 步进电机控制代码分析
本报告以wokwi平台上的Arduino Mega 2560开发板为例,通过具体代码实现了步进电机的位置控制和加速度控制。代码使用了AccelStepper库,该库提供了丰富的步进电机控制功能,如设置最大速度、加速度、目标位置等。
代码结构
- 库包含:包含AccelStepper库。
- 对象定义:定义一个AccelStepper对象,并指定步进电机的接口类型和引脚。
- 引脚定义:定义用于读取电位器值的模拟输入引脚。
- 设置函数:在
setup()函数中初始化步进电机的最大速度和加速度。 - 循环函数:在
loop()函数中持续读取电位器的值,设置步进电机的加速度和目标位置,并运行步进电机。
改进方案
- 引脚配置灵活性:通过定义引脚和接口类型,提高代码的灵活性。
- 输入范围映射:使用
map()函数将电位器的值映射到步进电机的实际位置范围。 - 加速度范围限制:使用
constrain()函数限制加速度的范围。 - 代码结构优化:将读取电位器值和设置步进电机参数的代码封装成函数,提高代码的可读性和可维护性。
- 调试信息:通过串口输出当前位置、目标位置和加速度,方便调试和监控。
4. 步进电机应用
步进电机因其高精度、高可靠性和良好的启停反转响应等特点,在工业自动化、机器人技术、智能家居等领域得到了广泛应用。例如,在工业自动化中,步进电机常用于精确控制机械臂的运动;在机器人技术中,步进电机用于驱动机器人的关节运动;在智能家居中,步进电机可用于控制窗帘、门窗等设备的开合。
5. 结论
本报告详细探讨了步进电机的原理及其在wokwi平台上的Arduino Mega 2560开发板中的应用。通过具体代码实现和分析,展示了步进电机的控制方法,并给出了代码的优化方案。步进电机因其独特的性能优势,在多个领域得到了广泛应用。随着嵌入式系统和物联网技术的发展,步进电机的应用前景将更加广阔。
6. 参考文献
报告撰写人:[您的姓名]
报告撰写日期:2025年3月27日
课程目标
本课程旨在通过wokwi平台,利用Arduino Mega 2560开发板,详细讲解步进电机的原理与应用。通过具体案例,学生将掌握步进电机的基本工作原理、控制方法以及在实际项目中的应用技巧。
知识点讲解
1. 步进电机原理
- 定义与分类:
- 步进电机是一种将电脉冲信号转换为角位移或线位移的电动机。
- 根据励磁方式,步进电机可分为磁阻式、永磁式和混磁式;根据相数,可分为单相、两相、三相和多相。
- 工作原理:
- 步进电机的驱动器接收外部的控制脉冲和方向信号。
- 驱动器内部的逻辑电路按照一定的时序控制电机的绕组进行通电。
- 通电后的绕组产生磁场,与转子上的永磁体或软磁材料相互作用,使转子旋转。
- 当两相绕组都通电时,电机保持静止并锁定位置。
2. Arduino Mega 2560基础
- 硬件介绍:
- Arduino Mega 2560是基于ATmega2560微控制器的开源电子原型平台。
- 具有54个数字输入/输出引脚、16个模拟输入引脚、4个串行端口和一个USB连接。
- 编程环境:
- 使用Arduino IDE进行编程。
- 介绍库管理,特别是AccelStepper库的使用。
3. 步进电机控制
- 控制方法:
- 使用AccelStepper库控制步进电机。
- 设置最大速度、加速度、目标位置等参数。
- 通过读取电位器的值来调整步进电机的位置和加速度。
- 代码实现:
- 初始化步进电机对象。
- 在
setup()函数中设置最大速度和加速度。 - 在
loop()函数中读取电位器值,设置步进电机的加速度和目标位置,并运行步进电机。
4. 案例实践
- 项目案例:
- 使用wokwi平台模拟步进电机控制系统。
- 通过电位器控制步进电机的位置和加速度。
- 观察步进电机的运动情况,并通过串口监视器输出调试信息。
- 代码优化:
- 使用
map()函数将电位器的值映射到步进电机的实际位置范围。 - 使用
constrain()函数限制加速度的范围。 - 封装函数,提高代码的可读性和可维护性。
- 使用
5. 步进电机应用
- 应用领域:
- 工业自动化:如机械臂、传送带等。
- 机器人技术:如机器人关节运动。
- 智能家居:如窗帘、门窗等设备的开合。
- 应用案例:
- 介绍几个具体的步进电机应用案例,分析其工作原理和控制方法。
教材案例模式
本课程采用教材案例模式进行教学,通过具体的项目案例引导学生学习和实践。每个知识点都配套有详细的讲解和示例代码,帮助学生理解和掌握。同时,课程还提供实验指导和调试技巧,帮助学生解决在实际操作中遇到的问题。
课程大纲
- 步进电机原理
- 定义与分类
- 工作原理
- 性能参数
- Arduino Mega 2560基础
- 硬件介绍
- 编程环境
- 库管理
- 步进电机控制
- 控制方法
- AccelStepper库介绍
- 代码实现与调试
- 案例实践
- 项目案例介绍
- 代码优化与封装
- 实验指导与调试技巧
- 步进电机应用
- 应用领域介绍
- 应用案例分析
- 未来发展趋势
结语
通过本课程的学习,学生将全面掌握步进电机的原理与应用,掌握Arduino Mega 2560开发板的使用和编程技巧,并能够通过具体案例实践,将所学知识应用于实际项目中。同时,学生还将学习到代码优化、调试技巧等实用知识,为未来的嵌入式系统开发打下坚实的基础。
逐行注释与详细分析
cpp复制代码
#include <AccelStepper.h> |
- 注释: 包含
AccelStepper库,该库用于控制步进电机,提供加速和减速功能。 - 分析: 这是一个常用的步进电机控制库,简化了步进电机的控制过程。
cpp复制代码
// Define a stepper and the pins it will use | |
AccelStepper stepper; // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5 |
- 注释: 定义一个
AccelStepper对象stepper,默认使用 4 线全步模式,连接到引脚 2, 3, 4, 5。 - 分析: 默认情况下,
AccelStepper使用 4 线全步模式。如果硬件连接不同,需要调整构造函数参数。
cpp复制代码
// This defines the analog input pin for reading the control voltage | |
// Tested with a 10k linear pot between 5v and GND | |
const byte PositionPot = A0; | |
const byte AccelerationPot = A1; |
- 注释: 定义两个模拟输入引脚
PositionPot和AccelerationPot,分别连接到电位器,用于读取位置和加速度控制电压。 - 分析: 使用电位器作为输入设备,可以灵活调整步进电机的目标位置和加速度。
cpp复制代码
void setup() | |
{ | |
stepper.setMaxSpeed(1000); | |
stepper.setAcceleration(35); | |
} |
- 注释: 在
setup()函数中设置步进电机的最大速度和加速度。 - 分析:
setMaxSpeed(1000)设置步进电机的最大速度为 1000 步/秒。setAcceleration(35)设置步进电机的加速度为 35 步/秒²。这些参数可以根据实际需求调整。
cpp复制代码
void loop() | |
{ | |
// Read new position | |
int analog_in = analogRead(PositionPot); | |
stepper.setAcceleration(analogRead(AccelerationPot)); | |
stepper.moveTo(analog_in); | |
stepper.run(); | |
} |
- 注释: 在
loop()函数中持续读取电位器的值,设置步进电机的加速度和目标位置,并运行步进电机。 - 分析:
analogRead(PositionPot)读取电位器的值,范围为 0 到 1023,作为步进电机的目标位置。stepper.setAcceleration(analogRead(AccelerationPot))根据另一个电位器的值设置步进电机的加速度。stepper.moveTo(analog_in)设置步进电机的目标位置。stepper.run()运行步进电机,使其移动到目标位置。
改进方案
- 引脚配置灵活性:
- 当前代码默认使用 4 线全步模式,并硬编码了引脚。可以通过构造函数参数或配置文件来设置引脚和步进模式,提高代码的灵活性。
- 输入范围映射:
- 电位器的读取值范围为 0 到 1023,但步进电机的实际位置可能需要映射到不同的范围。可以使用
map()函数将电位器的值映射到步进电机的实际位置范围。
- 电位器的读取值范围为 0 到 1023,但步进电机的实际位置可能需要映射到不同的范围。可以使用
- 加速度范围限制:
- 电位器的值直接用于设置加速度,可能导致加速度过大或过小。可以添加范围限制,确保加速度在合理范围内。
- 代码结构优化:
- 将读取电位器值和设置步进电机参数的代码封装成函数,提高代码的可读性和可维护性。
- 错误处理:
- 添加错误处理机制,如检查电位器是否连接正常,处理读取失败的情况。
- 调试信息:
- 添加串口输出调试信息,如当前位置、目标位置、加速度等,方便调试和监控。
改进后的代码示例
cpp复制代码
#include <AccelStepper.h> | |
// Define stepper motor interface type and pins | |
#define STEPPER_INTERFACE_TYPE AccelStepper::FULL4WIRE | |
#define STEPPER_PIN1 2 | |
#define STEPPER_PIN2 3 | |
#define STEPPER_PIN3 4 | |
#define STEPPER_PIN4 5 | |
AccelStepper stepper(STEPPER_INTERFACE_TYPE, STEPPER_PIN1, STEPPER_PIN2, STEPPER_PIN3, STEPPER_PIN4); | |
const byte PositionPot = A0; | |
const byte AccelerationPot = A1; | |
void setup() | |
{ | |
Serial.begin(9600); // Initialize serial communication for debugging | |
stepper.setMaxSpeed(1000); | |
stepper.setAcceleration(35); | |
} | |
void loop() | |
{ | |
int analog_in = analogRead(PositionPot); | |
int mapped_position = map(analog_in, 0, 1023, 0, 1000); // Map position to 0-1000 steps | |
int acceleration = analogRead(AccelerationPot); | |
int clamped_acceleration = constrain(acceleration, 10, 100); // Clamp acceleration to 10-100 steps/s² | |
stepper.setAcceleration(clamped_acceleration); | |
stepper.moveTo(mapped_position); | |
stepper.run(); | |
// Debug output | |
Serial.print("Current Position: "); | |
Serial.print(stepper.currentPosition()); | |
Serial.print(" Target Position: "); | |
Serial.print(mapped_position); | |
Serial.print(" Acceleration: "); | |
Serial.println(clamped_acceleration); | |
} |
改进点总结
- 引脚配置灵活性: 通过定义引脚和接口类型,提高了代码的灵活性。
- 输入范围映射: 使用
map()函数将电位器的值映射到步进电机的实际位置范围。 - 加速度范围限制: 使用
constrain()函数限制加速度的范围。 - 代码结构优化: 将读取电位器值和设置步进电机参数的代码封装在
loop()函数中,并添加了调试信息输出。 - 调试信息: 通过串口输出当前位置、目标位置和加速度,方便调试和监控。


















 1055
1055

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











