





 本教程介绍了如何使用TIAGo机器人进行自主导航。包括创建gmapping地图、使用激光雷达进行定位、路径规划和障碍物避让等内容。
本教程介绍了如何使用TIAGo机器人进行自主导航。包括创建gmapping地图、使用激光雷达进行定位、路径规划和障碍物避让等内容。
第二包的开源ROS教程蒂亚戈的模拟凉亭使机器人在室内空间自主导航。了解如何创建gmapping地图,在空间定位本身并做路径规划与实时避开障碍物蒂亚戈教程。PAL机器人团队提出可用教程蒂亚戈机器人导航的蒂亚戈在其公开的模拟表演,使之其他任务中为大家访问的兴趣。
使用gmapping创建地图
TIAGO可以创建环境地图的周围用基座上的激光测距仪。该地图是需要使用之后AMCL基于定位与地图提供蒂亚戈的地图中的姿势可靠的估计相符激光扫描。所有步骤都是为了在教程的详细地图的区域指挥蒂亚戈与键盘。在完成地图之后,它可以被保存并且可以用于执行自主定位和路径规划。这是TIAGo如何创建地图的示例:
ROS教程2:TIAGo gmapping在模拟中。
本地化和路径规划
让蒂亚戈自己定位并规划路径的兴趣两点之间的ROS导航教程的第二部分蒂亚戈。本教程介绍如何使TIAGo自主导航提供地图。协作机器人能够检测和避免使用基激光和RGB-D相机障碍其云台。
ROS教程2:TIAGo在模拟中的本地化。
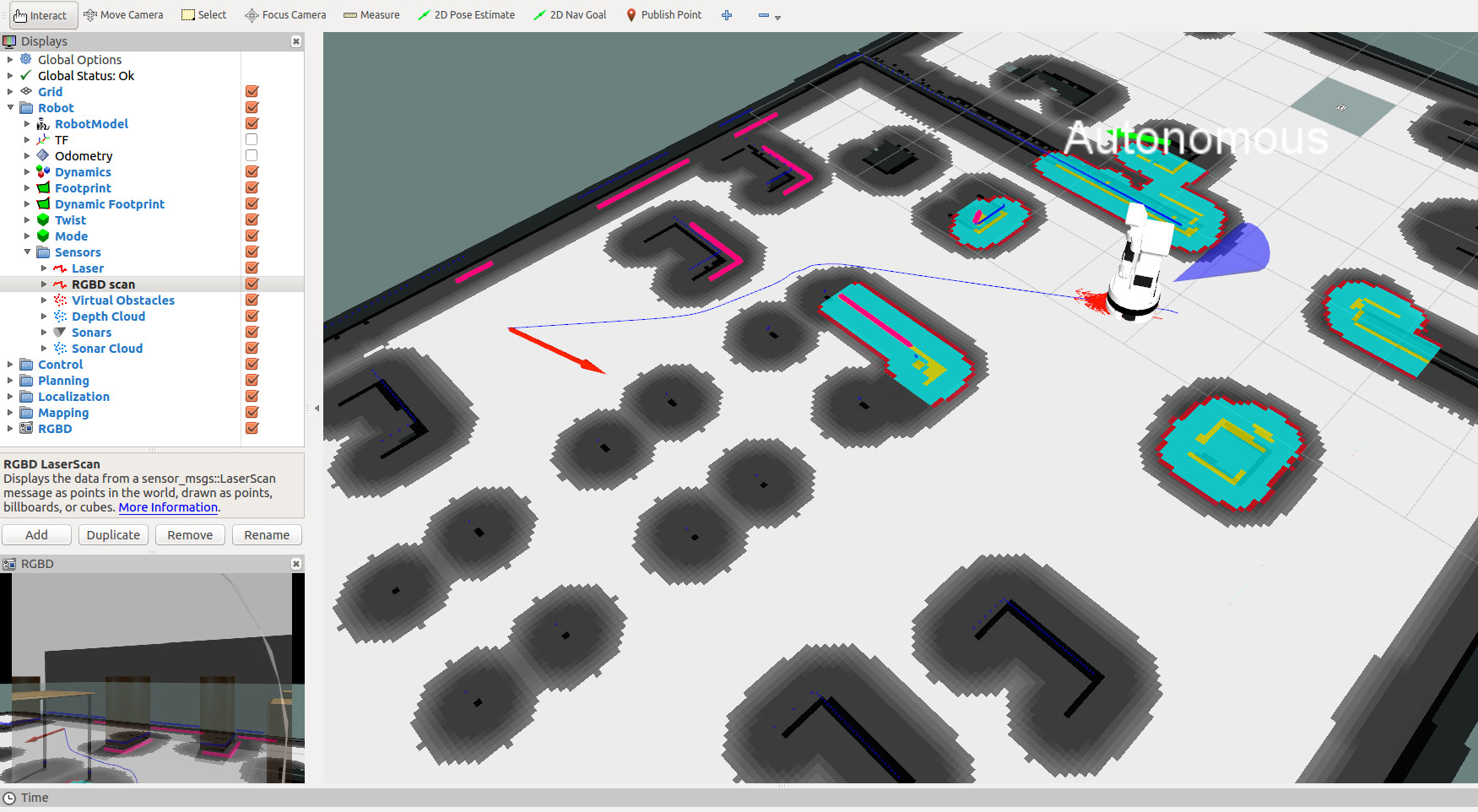
首先,激光扫描图的建立应该使用以前的映射教程创建。其次,在前面的教程中创建的地图应按照被打开这里的步骤,这将显示它在rviz 结果。不同类型的信息将覆盖在地图的顶部,其中:
- 粒子云:代表小红色箭头云AMCL过滤颗粒,该机器人周围蔓延。颗粒的浓度表示对其位置估计的增长的置信度。
- 全球costmap :这是用来受到全球规划师,以便计算路径,从地图到另一个的一个点导航没有得到太靠近映射期间注册的静态障碍物绕过障碍物的区域。更多细节,可以发现在这里。
- 本地costmap :类似于全球costmap,但它更小,并与机器人移动,用它来顾及在原始地图中不存在的新功能。它由本地计划程序使用,以避免障碍,静态和动态,同时尝试跟踪由全局计划程序计算的全局路径。更多细节,可以发现在这里。
- 激光扫描:在深蓝色线表示与该移动基体的激光测量点。此扫描用于在全局和本地成本映射中添加/删除障碍。
- RGBD扫描:在品红线表示由磁头的RGBD相机重建到地板上的点群的投影。此人工扫描也用于添加/删除全局和本地成本图的障碍。该扫描对于获得环境的3D信息是有用的,检测高于或低于激光扫描器计划的障碍物。
ROS教程2:自主TIAGo机器人导航路径。
所有这些信息按教程中的描述使用,以使TIAGo能够在给定空间中正确定位。此外,这使得同时在与rviz蒂亚戈自主导航,发送机器人,它需要达到一所需的点。行动应该通过最短的路径完成,并避免障碍。
我们想看看你的发展!
发现其它教程控制,MoveIt!打开CV和PCL 在蒂亚戈的ROS维基,这将很快在我们的博客中详细为好。分享您与我们真棒结果:通过送他们到marketing@pal-robotics.com。

















 3945
3945

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









