ROS及机器人课程资料整理(苏黎世联邦理工学院, ETH Zürich)
详细版ROS编程课程习题解答和说明:
http://blog.csdn.net/zhangrelay/article/details/79463689
课程翻译版本资料和文档下载地址:
http://blog.csdn.net/zhangrelay/article/details/79230844

~机器人系统设计及控制技术课程补充必修材料~
课件内容节选:
视频地址:http://v.youku.com/v_show/id_XMTYyMDM2MjE1Mg==.html
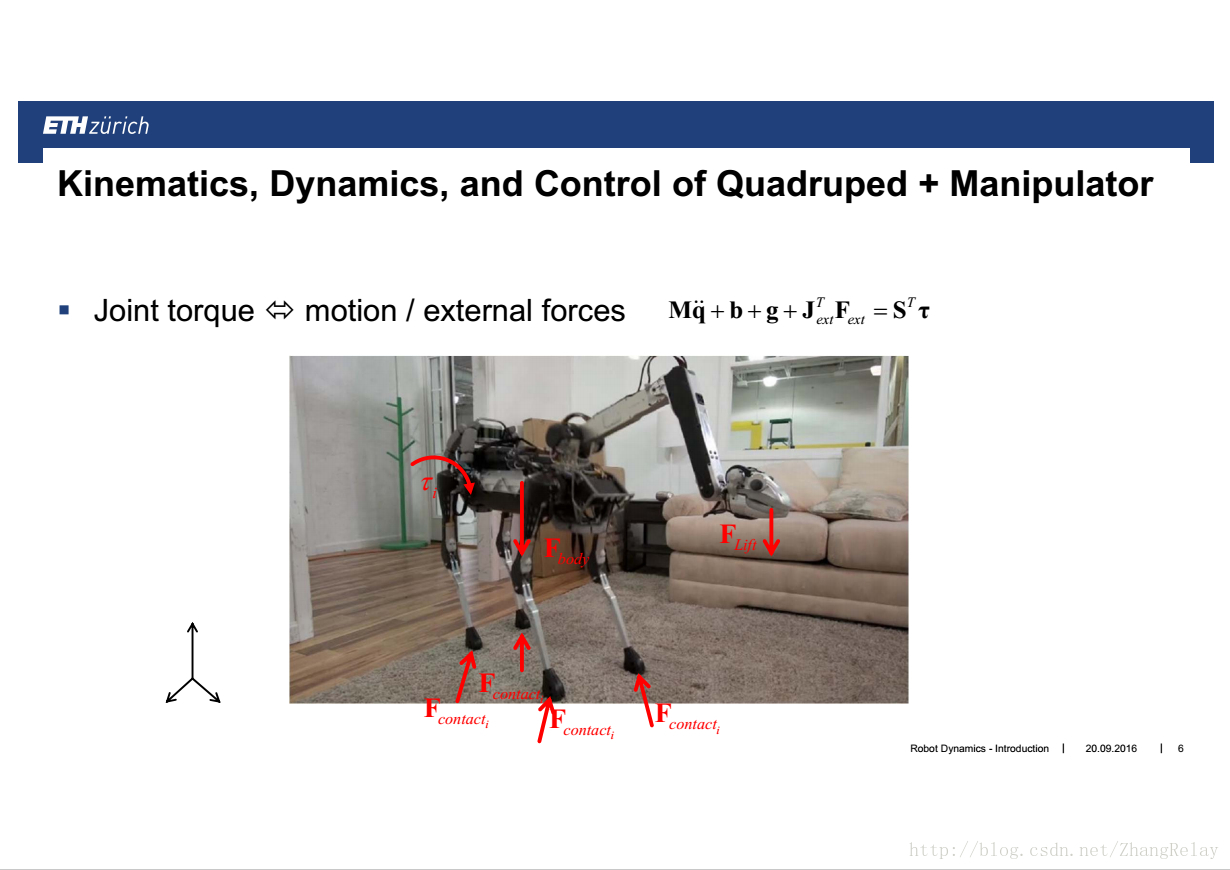
机器人运动学和动力学原理是学习和研究机器人必备基础,
ROS系统编程可以将相关算法在仿真和真实机器人上进行实验和验证。
如果链接无法打开,请在下列地址观看视频和下载资料:
1 视频 ROS机器人编程
2 资料 ROS机器人编程 机器人动力学
--------
参考网址:http://www.rsl.ethz.ch/education-students/lectures.html
--------
以下内容为机器翻译结果,仅供参考,更多信息请查阅源网址。
--------
机器人编程 - ROS
主要内容
摘要: 本课程介绍机器人操作系统(ROS),包括机器人常用的许多可用工具。借助不同的例子,该课程应为学生与机器人合作提供良好的起点。他们学习如何创建软件,包括仿真,界面传感器和执行器,以及集成控制算法。
目的:
- ROS架构:主,节点,主题,消息,服务,参数和操作
- 控制台命令:浏览和分析ROS系统和catkin工作区
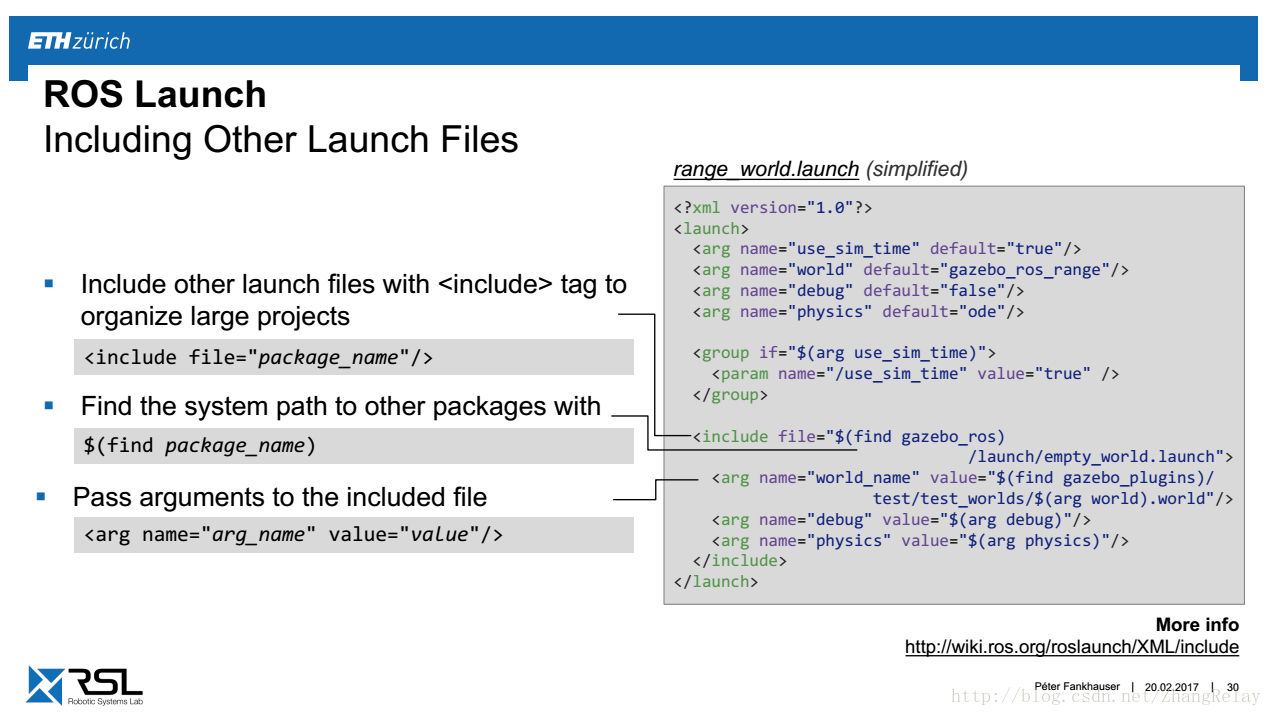
- 创建ROS包:结构,启动文件和最佳做法
- ROS C ++客户端库(roscpp):创建自己的ROS C ++程序
- 模拟ROS:凉亭模拟器,机器人模型(URDF)和模拟环境(SDF)
- 使用可视化(RViz)和用户界面工具(rqt)
- 内部ROS:TF转换系统,时间,行李
内容: 本课程由与自主机器人相关的指导性教学和练习,难度越来越大。您将学习如何使用ROS从头开始设置这样的系统,如何连接各个传感器和执行器,最后如何实现第一个闭环控制系统。
课程日期
位置:HG G1
时间:08.15-12.00
日期:20.2.2017,23.2.2017,24.2.2017,27.2.2017,2.3.2017
课前准备
因为课程将在使用ROS和Ubuntu的第一天开始,我们希望您在课程之前准备一个工作环境的笔记本电脑。在课程中,我们将与Ubuntu 14.04和ROS Indigo Igloo合作。我们强烈建议您使用以下软件使用虚拟机和已包含预安装环境的提供的映像:
- Ubuntu 14.04
- ROS Indigo Igloo
- Eclipse霓虹灯
- Catkin命令行工具
- 终结者
- 吉特
安装虚拟机
要运行提供的映像,您需要使用VMware Workstation 12 Pro(Windows,Linux)或VMware Fusion 8(Mac OS X)。该软件可以在ETH苏黎世的IT商店订购:https : //idesnx.ethz.ch/
请按照指定的说明从VMware下载并安装该软件。
下载图片
从polybox下载完整的文件夹“Ubuntu ROS-Course”:https: //polybox.ethz.ch/index.php/s/kPQFsNrpDinWQJL
我们建议您在计算机上至少拥有20GB的可用内存以运行虚拟机。
启动虚拟机
- 打开VMware Workstation
- 在下载的文件夹Ubuntu ROS-Course中打开文件Ubuntu ROS-Course.vmx
- 使用“启动此虚拟机”启动虚拟机
- 在Ubuntu下登录使用提供的帐户ROS课程:
课程材料
| | 主题 | 材料 |
|---|
| 20.2。 |
- ROS架构与哲学
- ROS主,节点和主题
- 控制台命令
- Catkin工作区和构建系统
- 启动文件
- 凉亭模拟器
|
|
| 23.2。 |
- ROS封装结构
- 与Eclipse集成和编程
- ROS C ++客户端库(roscpp)
- ROS订阅者和出版商
- ROS参数服务器
- RViz可视化
|
|
| 24.2。 |
- TF转换系统
- rqt用户界面
- 机器人模型(URDF)
- 模拟描述(SDF)
|
|
| 27.2。 |
- ROS服务
- ROS动作(actionlib)
- ROS时间
- ROS包
- 调试策略
|
|
| 2.3。 |
|
|
设置开发人员的电脑(课后)
如果您稍后将在Linux下开展涉及ROS编程的项目,我们建议您进行本地安装(不推荐用于本课程)。您可以使用这些说明安装与虚拟机上相同的安装 (PDF,77 KB)。
--------
机器人动力学
主要内容
摘要: 我们将概述如何运动和动态地模拟机器人手臂,腿式机器人,旋翼系统或固定翼等典型机器人系统。
目标: 本课程的主要目标是让学生深入了解如何建立最常见的机器人系统。学生在多体系统的运动学,动力学和旋转方面获得了坚实的背景。在现有技术应用的基础上,他/她将学习所有必要的工具,在机器人系统的设计或控制领域工作。
内容: 课程包括三个部分:首先,我们将刷新和深化学生在多体系统的运动学,动力学和旋转方面的知识。在这种情况下,学习材料将基于ETH可用的力学和动力学课程,特别关注其应用于机器人系统。目的是促进对各种类型机器人之间的相似和差异的概念性理解。在第二部分中,我们将把学习的材料应用于古典机器人手臂和腿部系统,并讨论运动学约束和相互作用力。第三部分重点介绍固定翼飞机的建模,以及相关的设计和控制理念。在这方面,我们还在机器人通常需要的程度上触及空气动力学和飞行力学。最后一部分最终涵盖了不同的直升机类型,重点是四轮转向器和我们今天在许多无人机应用中看到的同轴配置。关于所有主题的案例研究提供了与实际应用和机器人技术领域的联系。
脚本错误
这是与最初上传相比更新的脚本(在线版本)中更正的错误列表:
- 图2.1:phi角的错误箭头(球面坐标)
- 示例2.5.1,eq 2.70:x(而不是z)方向的角速度
- E矩阵不一致是固定的
- 固定pNE质量矩阵中的指数错误
- 公式2.66:缺少1/2
- 公式2.77和FF:错误的单位旋转
- 方程式2.211 sqrts的错误符号
- 雅可比方程式中的方程式2.214输入错误
- 公式2.186复制过去错误
- 公式2.218错误标志
- 公式2.207缺失指数(N定义错误指数)
讲座幻灯片勘误
这是与最初上传相比更新的幻灯片(在线版本)中更正的错误列表:
- 1运动学,S3:phi角的错误箭头(球面坐标)
- 2运动学,S21:左右矩阵的数值评估错误
- 修正的E矩阵在1,2和3运动学
--------
补充阅读:
从Patrick Wiesen通过ROS话语
在6个成功的ROS暑期学校之后,我们今年在亚琛应用科学大学(德国)提供另一个。活动计划于二零一七年八月十四日至二十五日期间。有兴趣学习ROS的人士现邀请现在注册!这个活动的国际学生资助有限,由DAAD提供。
在两周内,我们更详细地讨论了移动机器人的以下主题:ROS基础,通信,硬件接口,远程操作,变换,凉亭模拟,地标检测,本地化,映射,导航,控制,一些工业展览等所以。。。当然,所有这些话题都可以在实践中使用我们的移动机器人进行理论学习。

如果这还不够,我们会在8月26日至27日之后提供额外的ROS无人机周末。这将包括组装无人机,首次飞行设置,飞行模式,ROS接口,地标检测和与自主飞行接触。在我们的申请表格中随意选择这个选项。申请表,更多信息,照片和视频可以在我们的主页上找到:
ROS暑期学校亚琛
全部由MASCOR组织。ROS暑期学校旨在教会参与者如何开始使用ROS; 它是为那些对自主系统感兴趣的人创建的,但不太了解如何开始。因此,组织者建议学生掌握Linux(Ubuntu)的基本知识和一些编程语言,如Python或C ++。通过移动自主系统和认知机器人(MASCOR)实现为期两周的计划。
--
为了帮助您规划ROSCon 2017,这里有一些重要的日期(http://roscon.ros.org/2017/#important-dates):
- 征集建议书:2017年4月24日
- 提案截止日期:2017年6月25日
- 提案验收通知:2017年7月3日
- 提前报名截止日期:2017年8月1日
- 延迟注册开始:2017年8月31日
- ROSCon 2017:2017年9月21日至22日
旅游信息在会议网站上汇集在一起:http : //roscon.ros.org/2017/#location
我们正在征求赞助商的意见:http : //roscon.ros.org/2017/#sponsors
希望在ROSCon 2017上见到你!
--------

























 4196
4196

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









