







该代码完整实现了从TDOA定位到轨迹滤波的全流程,通过加权最小二乘解决非线性问题,再通过粒子滤波抑制噪声。代码结构清晰,适合作为定位算法的入门学习案例。实际应用中需根据场景调整参数和模型
文章目录
程序讲解
代码概述
目标:本程序旨在利用到达时间差(TDOA)和两步加权最小二乘法进行三维定位,并结合粒子滤波(PF)对运动轨迹进行优化和滤波。
主要步骤:
- 初始化参数:设置基站数量、噪声参数,并生成基站位置和目标运动轨迹。
- TDOA建模与定位:通过加权最小二乘法迭代求解目标位置。
- 粒子滤波(PF):对定位结果进行滤波,以减少噪声影响。
- 结果可视化:绘制目标轨迹、误差曲线以及RMSE对比图。
初始化与数据生成
参数定义
num_stations = 20; % 基站数量
std_var1 = 1e-10; % TDOA测量噪声标准差
c = 3e8; % 光速
stations_position = 3*randn(num_stations,3); % 随机生成基站位置
- 基站位置:通过
randn生成符合正态分布的随机坐标,以模拟真实环境中的基站分布。 - 运动轨迹:使用
positions生成目标的三维运动路径,设定其在X轴正向、Y轴负向匀速运动,并保持Z轴不变。
TDOA建模
delta = ones(num_stations,1)*position - stations_position;
r_ideal = sqrt(sum(delta.^2,2)); % 理想距离
r = (r_ideal/c + noise) * c; % 添加噪声后的距离
R = r(2:end) - r(1); % TDOA转换为距离差
- 距离计算:计算目标到每个基站的距离,并添加高斯噪声以模拟测量误差。
- 距离差构造:以第一个基站为参考,计算其他基站与该参考基站之间的距离差。
两步加权最小二乘定位
粗迭代求解初值
position_est(i3,:) = mean(stations_position); % 初始值设为基站位置均值
for i1 = 1:5 % 迭代次数
% 构造矩阵Ga和h
Ga = 2 * (基站1位置 - 其他基站位置);
h = 包含R^2和基站位置范数的线性项;
% 加权最小二乘解
W = (B*Q*B')^(-1); % 权重矩阵
u_star = (Ga' * W * Ga) \ (Ga' * W * h);
- 目标:通过线性化模型获得位置的粗略估计。
- 权重矩阵W:根据测量噪声协方差矩阵Q构造,反映不同测量的可信度。
细迭代优化
% 构造矩阵A和h2
A = 包含非线性项的雅可比矩阵;
h2 = 更新后的观测模型;
delta_u_star = (A' * W * A) \ (A' * W * h2);
u_hat = u_star - delta_u_star; % 最终估计位置
- 非线性修正:通过二次迭代进一步细化估计,修正粗估计中的近似误差。
粒子滤波(PF)
初始化粒子群
N = 100; % 粒子数量
P = X(:,1) + randn(3,N); % 初始粒子位置
w = 计算初始权重; % 基于与观测值的距离
- 粒子分布:在初始位置附近随机生成N个粒子,模拟状态的不确定性。
预测与更新
% 预测步骤(状态方程)
P(:,i) = 前一步位置 + 运动模型 + 过程噪声;
% 观测更新
dist = norm(粒子位置 - 观测位置);
w = 根据高斯分布更新权重;
- 状态方程:假设目标以匀速运动,叠加过程噪声(Q为协方差)。
- 权重计算:粒子权重反映其与当前观测的匹配程度。
重采样
% 系统重采样(避免粒子退化)
w_noml = 归一化权重;
index = 按权重概率选择粒子;
Pnext = P(:,index); % 新粒子集合
- 重采样目的:保留高权重的粒子,避免粒子贫化现象。
结果可视化
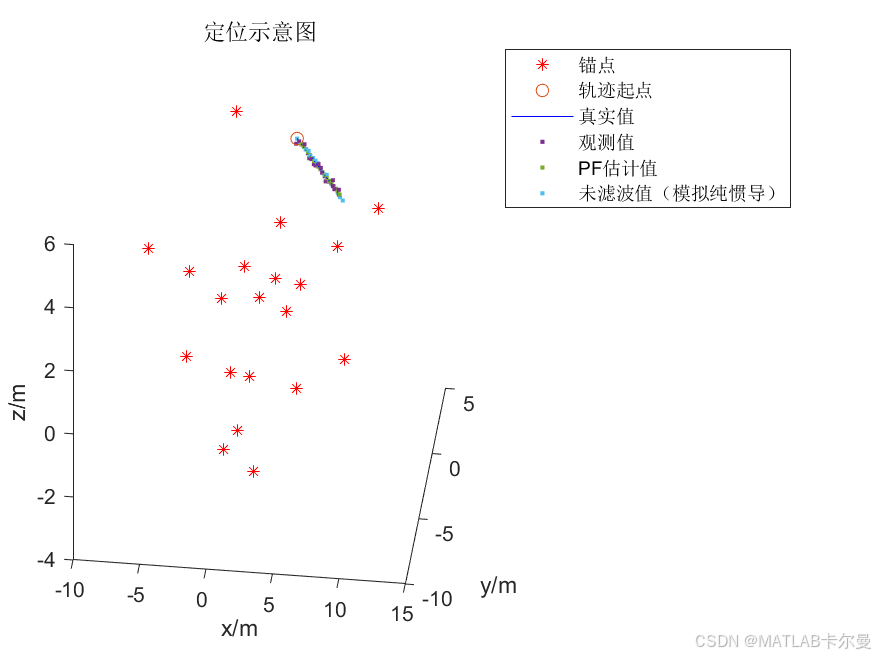
三维轨迹图
plot3(基站位置, 'r*', 'DisplayName', '锚点');
plot3(真实轨迹, '-b', 'DisplayName', '真实值');
plot3(滤波前观测, '.', 'DisplayName', '观测值');
plot3(PF结果, '.', 'DisplayName', 'PF估计值');
- 效果:对比真实轨迹、观测值与滤波结果,直观展示粒子滤波的平滑效果。
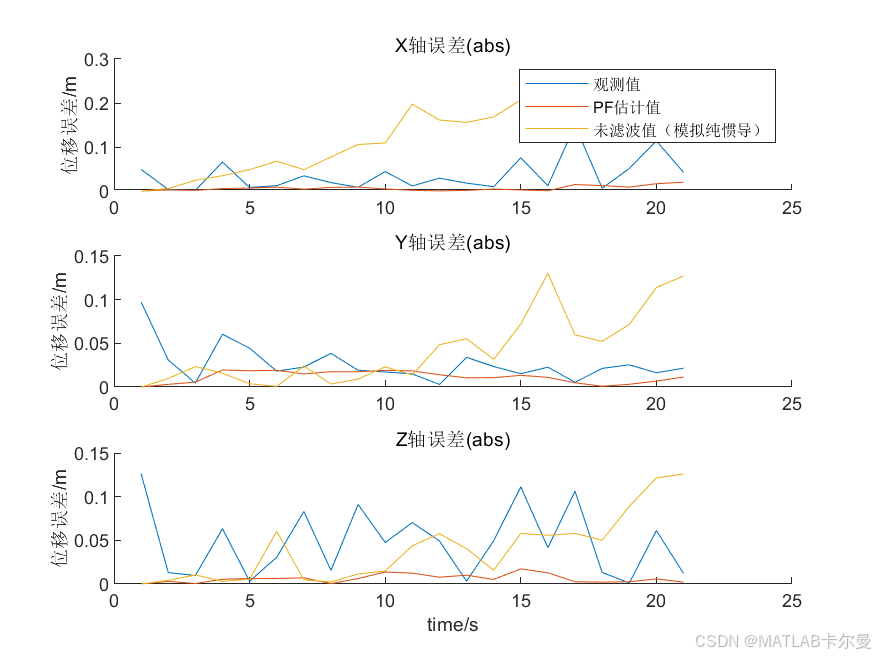
误差分析
% 计算各轴绝对误差
subplot(3,1,1); plot(X轴误差);
subplot(3,1,2); plot(Y轴误差);
subplot(3,1,3); plot(Z轴误差);
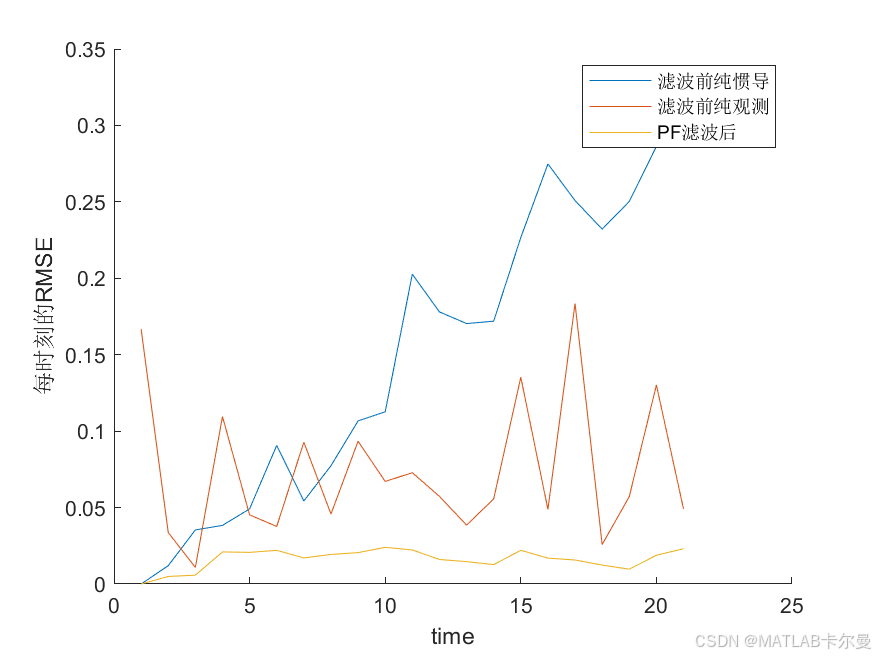
% RMSE对比
plot(RMSE_ins, RMSE_out, RMSE_PF);
- 分析:粒子滤波显著降低了位置估计的误差,尤其在噪声较大的情况下效果明显。
关键改进点与注意事项
-
TDOA模型局限性:
- 假设测量误差为高斯分布,但实际情况可能存在非高斯噪声。
- 迭代次数(当前设置为5次)会影响精度,需根据实际情况调整。
-
粒子滤波优化:
- 粒子数量N越多,定位精度通常越高,但计算量也随之增加。
- 过程噪声Q和观测噪声R应根据具体系统进行调整。
-
运动模型假设:
- 当前代码假设目标匀速运动(简化状态方程),对于复杂运动情况应考虑使用更复杂的模型(如卡尔曼滤波)。
运行结果
定位示意图:
误差曲线图:
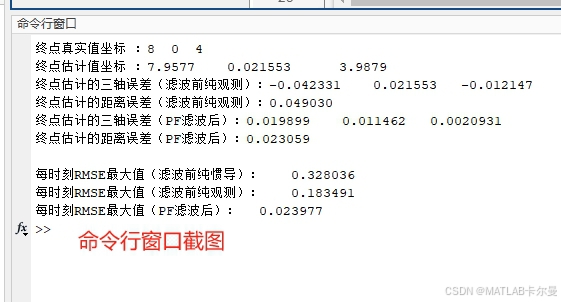
命令行输出结果:
MATLAB代码
% TDOA对轨迹的定位,使用两步加权最小二乘方法,定位三维目标、N个锚点,PF对轨迹进行滤波
% 2025-03-19/Ver1
%% 初始化
clc;clear;close all;
rng(0);
% 定义参数和待测点位置
num_stations = 20; % 基站数量(锚点数量)
std_var1 = 1e-10; %TDOA误差
% 固定基站位置
stations_position = 3*randn(num_stations,3);
c = 3e8;
% 生成轨迹数组
point1 = 2*ones(1,3);
positions = point1 + repmat(point1,21,1)+[0:0.2:4;0:-0.2:-4;zeros(1,21)]'; %生成目标的运动
for i3 = 1:size(positions,1)
position = positions(i3,:);
% TDOA 建模
delta = ones(num_stations,1)*position - stations_position; %未知点与各基站之间的相对位置(矢量)
r_ideal = (sum(delta.^2,2)).^(1/2); %计算移动台到各个基站的实际距离(标量)
delta_t = r_ideal/c+std_var1*randn(size(r_ideal));
r = delta_t*c;
Ri = r(2:end,:);
R1 = ones(num_stations-1,1)*r(1,:);
R = Ri-R1; %表示从[2,i]开始MS与基站i和基站1的距离差
%% 迭代初值估算
% 基站均值作为初值
position_est(i3,:) = mean(stations_position);
%% 最小二乘迭代
完整代码下载链接:https://download.csdn.net/download/callmeup/90541592
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 380
380

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











