







运动规划(Motion planning)与轨迹规划(Trajectory planning)
这里对运动规划与轨迹规划之间关系的定义参考的是Lavalle的《规划算法》1
运动规划与轨迹规划之间的关系
- 轨迹规划是运动规划的下层(传统规划)
- 运动规划的结果通常忽略动力学与运动学约束得到机器人或机械臂完成任务过程所需要的位置与姿态序列
- 轨迹规划则需要更加细致考虑动力学与运动学约束,使得机器人或机械臂能够安装运动规划的位姿序列移动以完成任务

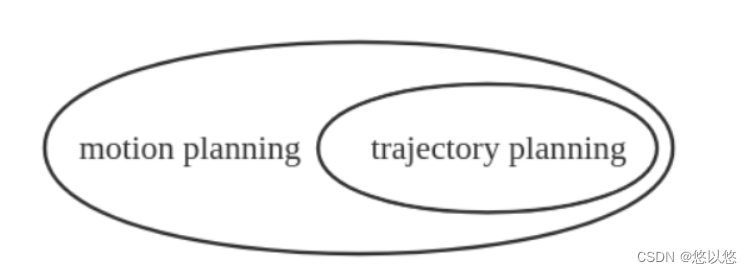
- 运动规划包含轨迹规划(近代规划)
- 不少运动规划方法在近代开始考虑不确定性、微分约束、建模误差以及最优性等方面。在这种情况下,运动规划与轨迹规划所做的事情就变得一样了
- 这种情况下,轨迹规划逐渐成为了运动规划的一部分,它们之间从上下游关系逐渐变为包含关系,轨迹成为了运动规划的一部分
- 运动规划抽身为更高的概念(现代规划)
- 由于近代规划轨迹规划逐渐成为了运动规划的一部分,因此运动规划逐渐抽身为更高的概念,来替代原来传统规划中运动规划+轨迹规划的概念
- 当运动规划变为更高的概念之后,出现了一个新的问题,那就是在讨论运动规划时,如何区分规划内容是指属于传统轨迹规划的那一部分还是指属于属于传统运动规划中的另一部分
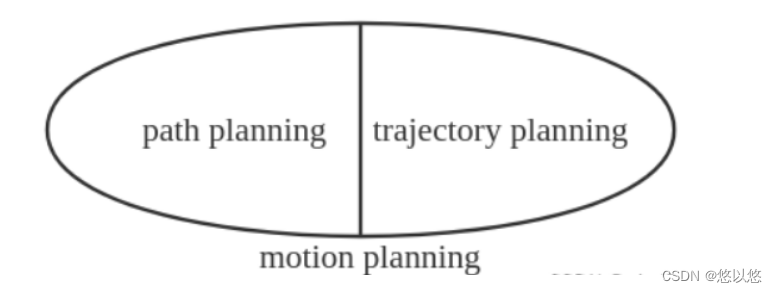
- 为了解决运动规划描述域时概念时大时小的问题,研究者们逐渐将属于传统运动规划的部分称为路径规划(Path planning)
规划的分类
基于以上的介绍,我们这里将规划分为三个概念,并对它们各自的职责进行说明
- 路径规划(path planning)
在给定位置A何位置B,在两个位置之间找到一条符合约束条件的路径,这个路径可以是碰撞、路径最短、能耗最小等 - 轨迹规划(trajectroy planning)
以路径规划的结果作为参考路径,给出使机器人从位置A到达位置B,且满足机器人运动学与动力学约束的时空轨迹 - 运动规划(motion planning)
由上层路径规划和下层轨迹规划组成,可以理解为除凸优化部分之外的所有规划问题
决策与规划的关系
- 广义的决策:
在心理学与传统人工智能领域,广义的决策是包含规划的 - 狭义的决策
在自动驾驶领域中的决策是狭义的,决策作为规划的前提,为规划提供依据与目标,而规划则是对决策的具体落实与展开 - 另一种参考说法
规划问题中能够约束成一个凸问题的部分属于决策,不能约束为凸问题的则为规划
运动规划与轨迹规划之间的关系:Lavalle S M. Planning Algorithms[M]. Cambridge University Press, 2006. ↩︎


















 9248
9248

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









