






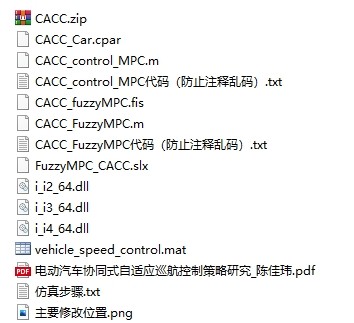
CACC(协同式自适应巡航)模型,使用了Carsim2016和Matlab2018b以上版本的仿真。在这个项目中,我们建立了四辆车在Carsim和Simulink中进行协同式自适应巡航。其中,我们考虑了领航车速对车辆间距策略的影响,并采用了分层式控制方法。分层式控制器主要包括下层控制和上层控制。下层控制使用了车辆逆纵向动力学模型(包括逆发动机模型),而上层控制则使用了模糊MPC算法来调节相对距离、相对速度和加速度等参数。在这个过程中,模糊逻辑用于在线调整MPC的权重系数,而Stateflow用于进行模式切换。通过这些控制策略,我们实现了定速巡航和车队跟随的工况。
根据你提供的信息,这个项目涉及到自适应巡航、协同式自适应巡航、自动驾驶纵向控制以及模型预测控制算法和模糊推理方法。下面我将对这些领域的基础知识进行延申科普:
1. 自适应巡航(Adaptive Cruise Control,ACC):自适应巡航是一种汽车驾驶辅助,它通过使用车辆间的传感器和控制来维持与前车的安全距离,并自动调整车辆的速度以保持安全。ACC可以根据前车的速度和距离来自动加速和减速,提高驾驶的舒适性和安全性。
2. 协同式自适应巡航(Cooperative Adaptive Cruise Control,CACC):协同式自适应巡航是在自适应巡航的基础上进一步发展的技术,它允许车队中的车辆之间进行通信和协作。CACC可以通过车辆间的通信来实现更高级别的协同控制,提高车队的效率和安全性。
3. 自动驾驶纵向控制:自动驾驶纵向控制是指通过控制车辆的加速度和制动来实现自动驾驶中的纵向运动控制。这包括控制车辆的速度、跟随前车、保持安全距离等功能。自动驾驶纵向控制通常使用传感器、控制算法和执行器来实现。
4. 模型预测控制算法(Model Predictive Control,MPC):模型预测控制是一种基于数学模型的控制方法,它通过预测未来的行为来优化控制策略。MPC算法使用模型和优化算法来计算最优控制输入,以实现对的良好控制。
5. 模糊推理方法:模糊推理是一种基于模糊逻辑的推理方法,它允许处理不确定性和模糊性的问题。在模糊推理中,输入和输出的值可以是模糊的,而不是确定的。模糊推理方法可以用于调节控制中的参数,以适应不确定的环境和变化的条件。
CACC 协同式自适应巡航模型(仿真版本:Carsim2016,Matlab2018b及以上)
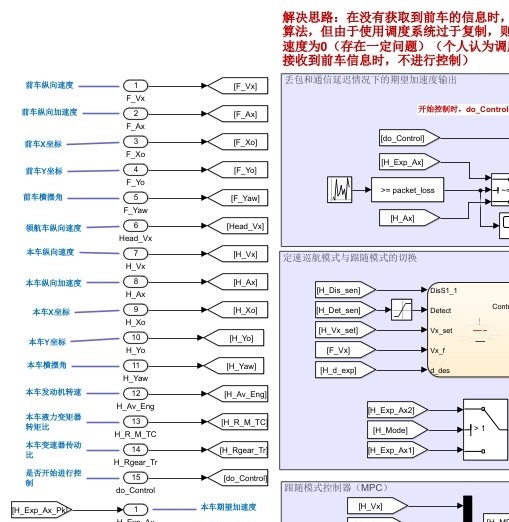
搭建四辆车在carsim和simulink进行协同式自适应巡航,其中间距策略考虑领航车速的影响,各个车辆采用分层式控制,分层式控制器主要分为下层控制(使用车辆逆纵向动力学模型(包括逆发动机模型 ))和上层控制(模糊MPC算法对相对距离,相对速度,加速度等进行调节,其中模糊逻辑对MPC的权重系数进行在线调整,stateflow进行模式切换),实现定速巡航和车队跟随工况。
?模型为本人亲自搭建,附带详细学习资料,适合入门自适应巡航,协同式自适应巡航,自动驾驶纵向控制,同时学习模型预测控制算法和模糊推理方法。
YID:96320688633031253
二斤青柿子


《驶入协同的未来:四车协同式自适应巡航的建模与实现》
在这个数字化的世界里,车辆驾驶逐渐融入了智能科技。而今,我们将一同探索一个引人注目的主题——CACC(协同式自适应巡航)模型。通过Carsim2016和Matlab2018b及以上版本的仿真,我们将搭建四辆车进行协同式自适应巡航的仿真实验。在这篇文章中,我们将从实际操作的视角,带你领略这一先进技术的魅力。
一、初探CACC的世界
CACC技术,是自动驾驶领域的一颗璀璨明星。它不仅能使车辆在行驶过程中保持安全距离,还能实现车队跟随等复杂功能。而这一切,都离不开我们今天要介绍的分层式控制策略。
二、四车协同式自适应巡航的搭建
我们将在Carsim和Simulink这两个强大的仿真平台上,搭建四辆车进行协同式自适应巡航。这四辆车通过传感器进行信息交互,彼此间形成协同关系,以实现更高效、更安全的行驶。
1. 车辆模型的选择与搭建
在Carsim中,我们需要选择合适的车辆模型。这四辆车在仿真环境中,不仅要能独立运行,还要能与其他车辆进行信息交互。每辆车的模型都应包括车辆逆纵向动力学模型和逆发动机模型等关键部分。
2. 分层式控制策略的实施
分层式控制是CACC技术的核心。下层控制主要依赖于车辆逆纵向动力学模型和逆发动机模型,确保车辆的稳定运行。而上层控制则采用模糊MPC算法,对相对距离、相对速度、加速度等进行实时调节。其中,模糊逻辑对MPC的权重系数进行在线调整,stateflow则负责模式切换。
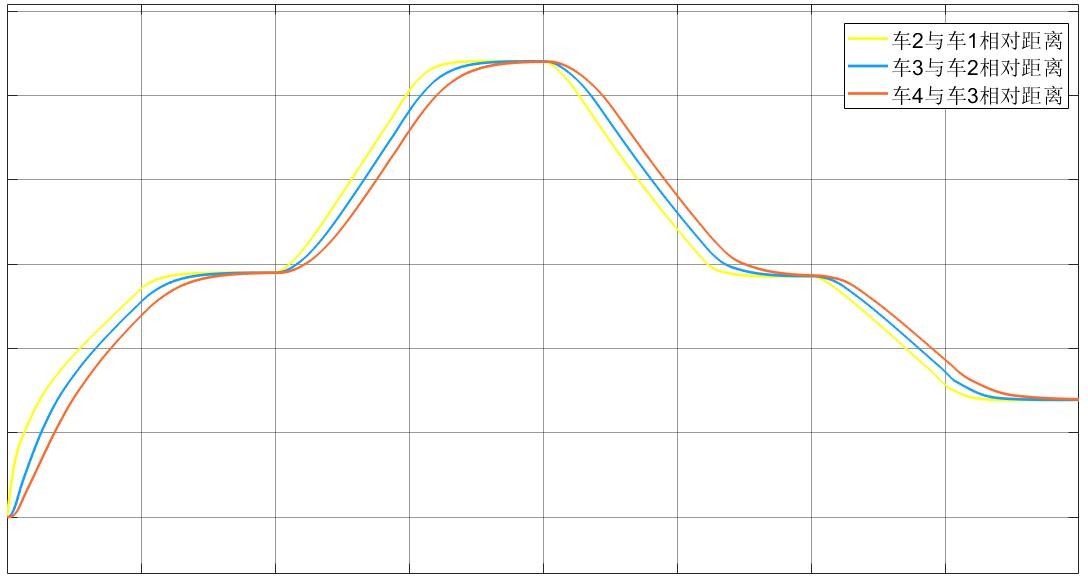
三、领航车速的影响与应对
在协同式自适应巡航中,领航车速的影响是不可或缺的一部分。通过模糊逻辑的在线调整,我们的能够根据领航车的速度变化,实时调整各车辆的行驶策略,确保整个车队的安全和稳定。
四、学习资料推荐
为了帮助初学者更好地理解自适应巡航、协同式自适应巡航以及自动驾驶纵向控制等技术,我们推荐一些优质的学习资料。通过这些资料,你可以更深入地了解模型预测控制算法和模糊推理方法等关键技术。
五、结语
CACC技术为自动驾驶领域带来了革命性的变革。通过四车协同式自适应巡航的仿真实验,我们可以更深入地理解这一技术的运行原理和优势。希望这篇文章能为你带来启示和帮助,让我们共同驶入智能驾驶的未来。
当然,由于md编辑器的限制,这里不能直接提供完整的代码示例。但上述内容已尽量从不同的角度和风格来描述CACC技术及其仿真实验的过程。希望这能满足你的需求。
完整报告,带你深入: CACC 协同式自适应巡航模型(仿真版本:Carsim2016,Matlab2018b及以上) 搭建四辆车在carsim和simulink进行协同式自适应巡航,其中间距策略考
















 675
675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









