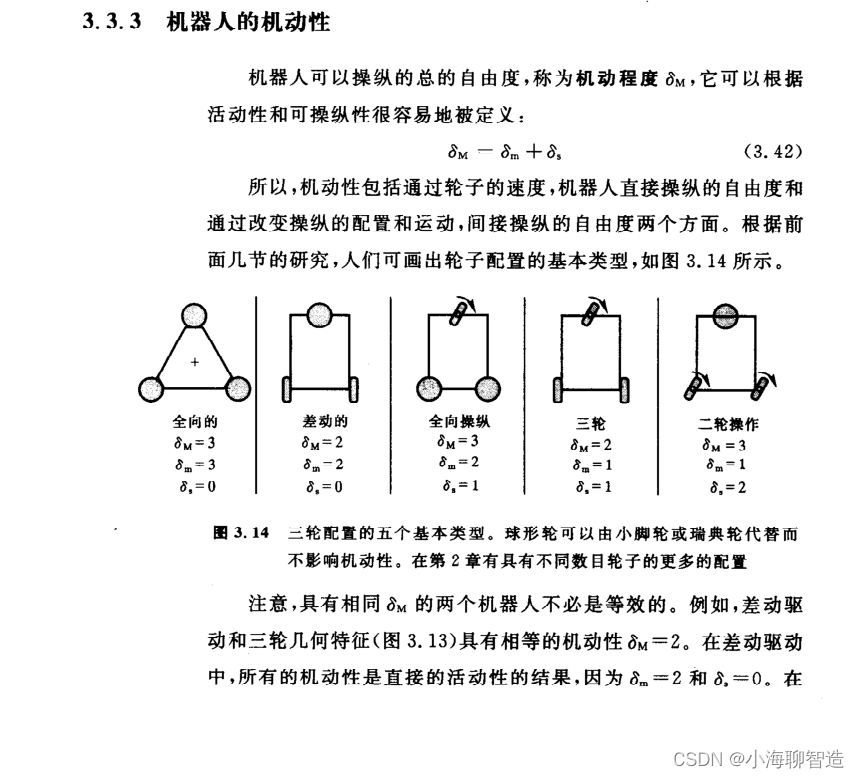
移动机器人的机动性 机器人底盘运动学的活动性是表示它在环境中直接运动的能力。限制活动性的基本约束是每一轮子必须满足它的滑动约束的规则。所以,我们可从方程(3.26)正式地推导机器人的活动性。 除了瞬时的运动学运动之外,移动机器人通过操纵可操纵的轮子,能够随时操纵它的位置,像我们将在3.3.3节看到那样,机器人的整个机动性就是根据标准轮运动学的滑动约束、可用的活动性以及操纵和转动可操纵的标准轮所提供的附加自由度的联合。

























 575
575











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








