










目标:
本教程将向您展示如何建模行走机器人、将状态发布为tf2消息并在 Rviz 中查看模拟。首先,我们创建描述机器人组件的 URDF 模型。接下来,我们编写一个节点来模拟运动并发布 JointState 和变换。然后我们使用robot_state_publisher将整个机器人状态发布到/tf2。

步骤流程:
- 创建包
创建目录:
mkdir -p second_ros2_ws/src
然后创建包:
cd second_ros2_ws/src
ros2 pkg create --build-type ament_python --license Apache-2.0 urdf_tutorial_r2d2 --dependencies rclpy
cd urdf_tutorial_r2d2
您现在应该会看到一个urdf_tutorial_r2d2文件夹。接下来,您将对其进行一些更改
2 创建 URDF 文件
mkdir -p urdf

写入urdf. 用vscode 打开目录,在 新建r2d2.urdf ,代码如下:
<robot name="r2d2">
<link name="axis">
<visual>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<geometry>
<cylinder radius="0.01" length=".5" />
</geometry>
<material name="gray">
<color rgba=".2 .2 .2 1" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<geometry>
<cylinder radius="0.01" length=".5" />
</geometry>
<contact_coefficients mu="0" kp="1000.0" kd="1.0"/>
</collision>
</link>
<link name="leg1">
<inertial>
<mass value="1"/>
<inertia ixx="1e-3" ixy="0" ixz="0" iyy="1e-3" iyz="0" izz="1e-3" />
<origin/>
</inertial>
<visual>
<origin xyz="0 0 -.3" />
<geometry>
<box size=".20 .10 .8" />
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<origin xyz="0 0 -.3" />
<geometry>
<box size=".20 .10 .8" />
</geometry>
<contact_coefficients mu="0" kp="1000.0" kd="1.0"/>
</collision>
</link>
<joint name="leg1connect" type="fixed">
<origin xyz="0 .30 0" />
<parent link="axis"/>
<child link="leg1"/>
</joint>
<link name="leg2">
<inertial>
<mass value="1"/>
<inertia ixx="1e-3" ixy="0" ixz="0" iyy="1e-3" iyz="0" izz="1e-3" />
<origin/>
</inertial>
<visual>
<origin xyz="0 0 -.3" />
<geometry>
<box size=".20 .10 .8" />
</geometry>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
<collision>
<origin xyz="0 0 -.3" />
<geometry>
<box size=".20 .10 .8" />
</geometry>
<contact_coefficients mu="0" kp="1000.0" kd="1.0"/>
</collision>
</link>
<joint name="leg2connect" type="fixed">
<origin xyz="0 -.30 0" />
<parent link="axis"/>
<child link="leg2"/>
</joint>
<link name="body">
<inertial>
<mass value="1"/>
<inertia ixx="1e-3" ixy="0" ixz="0" iyy="1e-3" iyz="0" izz="1e-3" />
<origin/>
</inertial>
<visual>
<origin xyz="0 0 -0.2" />
<geometry>
<cylinder radius=".20" length=".6"/>
</geometry>
<material name="white"/>
</visual>
<collision>
<origin xyz="0 0 0.2" />
<geometry>
<cylinder radius=".20" length=".6"/>
</geometry>
<contact_coefficients mu="0" kp="1000.0" kd="1.0"/>
</collision>
</link>
<joint name="tilt" type="revolute">
<parent link="axis"/>
<child link="body"/>
<origin xyz="0 0 0" rpy="0 0 0" />
<axis xyz="0 1 0" />
<limit upper="0" lower="-.5" effort="10" velocity="10" />
</joint>
<link name="head">
<inertial>
<mass value="1"/>
<inertia ixx="1e-3" ixy="0" ixz="0" iyy="1e-3" iyz="0" izz="1e-3" />
<origin/>
</inertial>
<visual>
<geometry>
<sphere radius=".4" />
</geometry>
<material name="white" />
</visual>
<collision>
<origin/>
<geometry>
<sphere radius=".4" />
</geometry>
<contact_coefficients mu="0" kp="1000.0" kd="1.0"/>
</collision>
</link>
<joint name="swivel" type="continuous">
<origin xyz="0 0 0.1" />
<axis xyz="0 0 1" />
<parent link="body"/>
<child link="head"/>
</joint>
<link name="rod">
<inertial>
<mass value="1"/>
<inertia ixx="1e-3" ixy="0" ixz="0" iyy="1e-3" iyz="0" izz="1e-3" />
<origin/>
</inertial>
<visual>
<origin xyz="0 0 -.1" />
<geometry>
<cylinder radius=".02" length=".2" />
</geometry>
<material name="gray" />
</visual>
<collision>
<origin/>
<geometry>
<cylinder radius=".02" length=".2" />
</geometry>
<contact_coefficients mu="0" kp="1000.0" kd="1.0"/>
</collision>
</link>
<joint name="periscope" type="prismatic">
<origin xyz=".12 0 .15" />
<axis xyz="0 0 1" />
<limit upper="0" lower="-.5" effort="10" velocity="10" />
<parent link="head"/>
<child link="rod"/>
</joint>
<link name="box">
<inertial>
<mass value="1"/>
<inertia ixx="1e-3" ixy="0" ixz="0" iyy="1e-3" iyz="0" izz="1e-3" />
<origin/>
</inertial>
<visual>
<geometry>
<box size=".05 .05 .05" />
</geometry>
<material name="blue" >
<color rgba="0 0 1 1" />
</material>
</visual>
<collision>
<origin/>
<geometry>
<box size=".05 .05 .05" />
</geometry>
<contact_coefficients mu="0" kp="1000.0" kd="1.0"/>
</collision>
</link>
<joint name="boxconnect" type="fixed">
<origin xyz="0 0 0" />
<parent link="rod"/>
<child link="box"/>
</joint>
</robot>
上述urdf 说明:
r2d2 机器人模型
│
├── Link: axis
│ ├── Visual: Cylinder (radius: 0.01, length: 0.5, color: gray)
│ └── Collision: Cylinder (radius: 0.01, length: 0.5)
│
├── Link: leg1
│ ├── Inertial: mass=1, inertia=(1e-3, 1e-3, 1e-3)
│ ├── Visual: Box (size: 0.20, 0.10, 0.8, color: white)
│ └── Collision: Box (size: 0.20, 0.10, 0.8)
│
├── Joint: leg1connect (type: fixed)
│ ├── Parent: axis
│ └── Child: leg1
│
├── Link: leg2
│ ├── Inertial: mass=1, inertia=(1e-3, 1e-3, 1e-3)
│ ├── Visual: Box (size: 0.20, 0.10, 0.8, color: white)
│ └── Collision: Box (size: 0.20, 0.10, 0.8)
│
├── Joint: leg2connect (type: fixed)
│ ├── Parent: axis
│ └── Child: leg2
│
├── Link: body
│ ├── Inertial: mass=1, inertia=(1e-3, 1e-3, 1e-3)
│ ├── Visual: Cylinder (radius: 0.20, length: 0.6, color: white)
│ └── Collision: Cylinder (radius: 0.20, length: 0.6)
│
├── Joint: tilt (type: revolute)
│ ├── Parent: axis
│ └── Child: body
│
├── Link: head
│ ├── Inertial: mass=1, inertia=(1e-3, 1e-3, 1e-3)
│ ├── Visual: Sphere (radius: 0.4, color: white)
│ └── Collision: Sphere (radius: 0.4)
│
├── Joint: swivel (type: continuous)
│ ├── Parent: body
│ └── Child: head
│
├── Link: rod
│ ├── Inertial: mass=1, inertia=(1e-3, 1e-3, 1e-3)
│ ├── Visual: Cylinder (radius: 0.02, length: 0.2, color: gray)
│ └── Collision: Cylinder (radius: 0.02, length: 0.2)
│
├── Joint: periscope (type: prismatic)
│ ├── Parent: head
│ └── Child: rod
│
├── Link: box
│ ├── Inertial: mass=1, inertia=(1e-3, 1e-3, 1e-3)
│ ├── Visual: Box (size: 0.05, 0.05, 0.05, color: blue)
│ └── Collision: Box (size: 0.05, 0.05, 0.05)
│
└── Joint: boxconnect (type: fixed)
├── Parent: rod
└── Child: box
详细描述
- Link: axis
Visual: 描述一个灰色的圆柱体,半径为0.01,长度为0.5。
Collision: 与Visual部分相同的圆柱体,用于碰撞检测。
-
Link: leg1
-
Inertial: 设置了质量为1的惯性属性。
Visual: 描述一个白色的长方体,尺寸为0.20x0.10x0.8。
Collision: 与Visual部分相同的长方体,用于碰撞检测。 -
Joint: leg1connect
Type: 固定关节。
Parent: axis。
Child: leg1。
Link: leg2
Inertial: 设置了质量为1的惯性属性。
Visual: 描述一个白色的长方体,尺寸为0.20x0.10x0.8。
Collision: 与Visual部分相同的长方体,用于碰撞检测。
Joint: leg2connect
Type: 固定关节。
Parent: axis。
Child: leg2。
Link: body
Inertial: 设置了质量为1的惯性属性。
Visual: 描述一个白色的圆柱体,半径为0.20,长度为0.6。
Collision: 与Visual部分相同的圆柱体,用于碰撞检测。
Joint: tilt
Type: 转动关节。
Parent: axis。
Child: body。
Link: head
Inertial: 设置了质量为1的惯性属性。
Visual: 描述一个白色的球体,半径为0.4。
Collision: 与Visual部分相同的球体,用于碰撞检测。
Joint: swivel
Type: 连续旋转关节。
Parent: body。
Child: head。
Link: rod
Inertial: 设置了质量为1的惯性属性。
Visual: 描述一个灰色的圆柱体,半径为0.02,长度为0.2。
Collision: 与Visual部分相同的圆柱体,用于碰撞检测。
-
Joint: periscope
-
Type: 伸缩关节。
Parent: head。
Child: rod。
Link: box -
Inertial: 设置了质量为1的惯性属性。
Visual: 描述一个蓝色的长方体,尺寸为0.05x0.05x0.05。
Collision: 与Visual部分相同的长方体,用于碰撞检测。
Joint: boxconnect
Type: 固定关节。
Parent: rod。
Child: box。
配置rviz
在urdf 目录中继续 新增rviz 配置文件 r2d2.rviz , 文件内容如下:
Panels:
- Class: rviz_common/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /Status1
- /TF1
- /RobotModel1
- /RobotModel1/Description Topic1
Splitter Ratio: 0.5
Tree Height: 617
- Class: rviz_common/Selection
Name: Selection
- Class: rviz_common/Tool Properties
Expanded:
- /2D Goal Pose1
- /Publish Point1
Name: Tool Properties
Splitter Ratio: 0.5886790156364441
- Class: rviz_common/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 1
Class: rviz_default_plugins/Grid
Color: 160; 160; 164
Enabled: true
Line Style:
Line Width: 0.029999999329447746
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 10
Reference Frame: <Fixed Frame>
Value: true
- Class: rviz_default_plugins/TF
Enabled: true
Frame Timeout: 15
Frames:
All Enabled: true
axis:
Value: true
body:
Value: true
box:
Value: true
head:
Value: true
leg1:
Value: true
leg2:
Value: true
odom:
Value: true
rod:
Value: true
Marker Scale: 1
Name: TF
Show Arrows: true
Show Axes: true
Show Names: false
Tree:
odom:
axis:
body:
head:
rod:
box:
{}
leg1:
{}
leg2:
{}
Update Interval: 0
Value: true
- Alpha: 1
Class: rviz_default_plugins/RobotModel
Collision Enabled: false
Description File: ""
Description Source: Topic
Description Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /robot_description
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
axis:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
body:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
box:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
head:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
leg1:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
leg2:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
rod:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
Enabled: true
Global Options:
Background Color: 48; 48; 48
Fixed Frame: odom
Frame Rate: 30
Name: root
Tools:
- Class: rviz_default_plugins/Interact
Hide Inactive Objects: true
- Class: rviz_default_plugins/MoveCamera
- Class: rviz_default_plugins/Select
- Class: rviz_default_plugins/FocusCamera
- Class: rviz_default_plugins/Measure
Line color: 128; 128; 0
- Class: rviz_default_plugins/SetInitialPose
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /initialpose
- Class: rviz_default_plugins/SetGoal
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /goal_pose
- Class: rviz_default_plugins/PublishPoint
Single click: true
Topic:
Depth: 5
Durability Policy: Volatile
History Policy: Keep Last
Reliability Policy: Reliable
Value: /clicked_point
Transformation:
Current:
Class: rviz_default_plugins/TF
Value: true
Views:
Current:
Class: rviz_default_plugins/Orbit
Distance: 10
Enable Stereo Rendering:
Stereo Eye Separation: 0.05999999865889549
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Focal Point:
X: 0
Y: 0
Z: 0
Focal Shape Fixed Size: true
Focal Shape Size: 0.05000000074505806
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.009999999776482582
Pitch: 0.459797203540802
Target Frame: <Fixed Frame>
Value: Orbit (rviz)
Yaw: 4.618575572967529
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 846
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd000000040000000000000156000002f4fc0200000008fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000005c00fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000185000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000003d000002f4000000c900fffffffb0000002000730065006c0065006300740069006f006e00200062007500660066006500720200000138000000aa0000023a00000294fb00000014005700690064006500530074006500720065006f02000000e6000000d2000003ee0000030bfb0000000c004b0069006e0065006300740200000186000001060000030c00000261000000010000010f000002f4fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073010000003d000002f4000000a400fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004420000003efc0100000002fb0000000800540069006d00650100000000000004420000000000000000fb0000000800540069006d00650100000000000004500000000000000000000002cb000002f400000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1340
X: 72
Y: 60
RViz 配置文件说明
- Panels: 定义了RViz中的不同面板,包括显示面板、选择面板、工具属性面板和视图面板。
- Visualization Manager: 配置了RViz的显示管理器,包括网格、TF、机器人模型等显示元素。
- Tools: 列出了RViz中可用的工具,如相机移动、选择、测量、设置初始姿态和设置目标等。
- Transformation: 配置了当前的变换管理器(TF)。
- Views: 定义了当前视图设置,如轨道视图。
- Window Geometry: 设置了RViz窗口的几何属性,如高度、宽度和面板折叠状态。
详细说明
- Panels
- Displays Panel: 显示当前的所有可视化对象,如网格、TF、机器人模型等。
包括全局选项、状态、TF、机器人模型等树形结构展开设置。 - Selection Panel: 用于选择和高亮显示RViz中的对象。
- Tool Properties Panel: 显示当前选中工具的属性。
- Views Panel: 显示和管理当前的视图设置。
- Visualization Manager
Grid: 显示网格,帮助定位和参考。 - TF: 显示TF树,用于查看各坐标系之间的关系。
- RobotModel: 显示机器人模型,用于查看和调试机器人状态。
Tools
- Interact: 用于与RViz中的对象交互。
- MoveCamera: 移动相机以调整视角。
- Select: 选择对象。
- FocusCamera: 聚焦相机到选中对象。
- Measure: 测量工具。
3 发布状态
现在我们需要一种方法来指定机器人处于什么状态。为此,我们必须指定所有三个关节和整体里程表。
在second_ros2_ws/src/urdf_tutorial_r2d2/urdf_tutorial_r2d2/ 目录下新增文件 state_publisher.py
如下图所示:
文件代码如下:
from math import sin, cos, pi
import rclpy
from rclpy.node import Node
from rclpy.qos import QoSProfile
from geometry_msgs.msg import Quaternion
from sensor_msgs.msg import JointState
from tf2_ros import TransformBroadcaster, TransformStamped
class StatePublisher(Node):
def __init__(self):
rclpy.init()
super().__init__('state_publisher')
qos_profile = QoSProfile(depth=10)
self.joint_pub = self.create_publisher(JointState, 'joint_states', qos_profile)
self.broadcaster = TransformBroadcaster(self, qos=qos_profile)
self.nodeName = self.get_name()
self.get_logger().info("{0} started".format(self.nodeName))
degree = pi / 180.0
loop_rate = self.create_rate(30)
# robot state
tilt = 0.
tinc = degree
swivel = 0.
angle = 0.
height = 0.
hinc = 0.005
# message declarations
odom_trans = TransformStamped()
odom_trans.header.frame_id = 'odom'
odom_trans.child_frame_id = 'axis'
joint_state = JointState()
try:
while rclpy.ok():
rclpy.spin_once(self)
# update joint_state
now = self.get_clock().now()
joint_state.header.stamp = now.to_msg()
joint_state.name = ['swivel', 'tilt', 'periscope']
joint_state.position = [swivel, tilt, height]
# update transform
# (moving in a circle with radius=2)
odom_trans.header.stamp = now.to_msg()
odom_trans.transform.translation.x = cos(angle)*2
odom_trans.transform.translation.y = sin(angle)*2
odom_trans.transform.translation.z = 0.7
odom_trans.transform.rotation = \
euler_to_quaternion(0, 0, angle + pi/2) # roll,pitch,yaw
# send the joint state and transform
self.joint_pub.publish(joint_state)
self.broadcaster.sendTransform(odom_trans)
# Create new robot state
tilt += tinc
if tilt < -0.5 or tilt > 0.0:
tinc *= -1
height += hinc
if height > 0.2 or height < 0.0:
hinc *= -1
swivel += degree
angle += degree/4
# This will adjust as needed per iteration
loop_rate.sleep()
except KeyboardInterrupt:
pass
def euler_to_quaternion(roll, pitch, yaw):
qx = sin(roll/2) * cos(pitch/2) * cos(yaw/2) - cos(roll/2) * sin(pitch/2) * sin(yaw/2)
qy = cos(roll/2) * sin(pitch/2) * cos(yaw/2) + sin(roll/2) * cos(pitch/2) * sin(yaw/2)
qz = cos(roll/2) * cos(pitch/2) * sin(yaw/2) - sin(roll/2) * sin(pitch/2) * cos(yaw/2)
qw = cos(roll/2) * cos(pitch/2) * cos(yaw/2) + sin(roll/2) * sin(pitch/2) * sin(yaw/2)
return Quaternion(x=qx, y=qy, z=qz, w=qw)
def main():
node = StatePublisher()
if __name__ == '__main__':
main()
代码说明:
- 导入必要的库:
from math import sin, cos, pi
import rclpy
from rclpy.node import Node
from rclpy.qos import QoSProfile
from geometry_msgs.msg import Quaternion
from sensor_msgs.msg import JointState
from tf2_ros import TransformBroadcaster, TransformStamped
- 定义StatePublisher类:
class StatePublisher(Node):
def __init__(self):
rclpy.init()
super().__init__('state_publisher')
qos_profile = QoSProfile(depth=10)
self.joint_pub = self.create_publisher(JointState, 'joint_states', qos_profile)
self.broadcaster = TransformBroadcaster(self, qos=qos_profile)
self.nodeName = self.get_name()
self.get_logger().info("{0} started".format(self.nodeName))
- 初始化参数和变量:
degree = pi / 180.0
loop_rate = self.create_rate(30)
tilt = 0.
tinc = degree
swivel = 0.
angle = 0.
height = 0.
hinc = 0.005
- 声明消息类型:
odom_trans = TransformStamped()
odom_trans.header.frame_id = 'odom'
odom_trans.child_frame_id = 'axis'
joint_state = JointState()
- 主循环:
try:
while rclpy.ok():
rclpy.spin_once(self)
now = self.get_clock().now()
joint_state.header.stamp = now.to_msg()
joint_state.name = ['swivel', 'tilt', 'periscope']
joint_state.position = [swivel, tilt, height]
odom_trans.header.stamp = now.to_msg()
odom_trans.transform.translation.x = cos(angle)*2
odom_trans.transform.translation.y = sin(angle)*2
odom_trans.transform.translation.z = 0.7
odom_trans.transform.rotation = euler_to_quaternion(0, 0, angle + pi/2)
self.joint_pub.publish(joint_state)
self.broadcaster.sendTransform(odom_trans)
tilt += tinc
if tilt < -0.5 or tilt > 0.0:
tinc *= -1
height += hinc
if height > 0.2 or height < 0.0:
hinc *= -1
swivel += degree
angle += degree/4
loop_rate.sleep()
except KeyboardInterrupt:
pass
- 欧拉角转四元数函数:
def euler_to_quaternion(roll, pitch, yaw):
qx = sin(roll/2) * cos(pitch/2) * cos(yaw/2) - cos(roll/2) * sin(pitch/2) * sin(yaw/2)
qy = cos(roll/2) * sin(pitch/2) * cos(yaw/2) + sin(roll/2) * cos(pitch/2) * sin(yaw/2)
qz = cos(roll/2) * cos(pitch/2) * sin(yaw/2) - sin(roll/2) * sin(pitch/2) * cos(yaw/2)
qw = cos(roll/2) * cos(pitch/2) * cos(yaw/2) + sin(roll/2) * sin(pitch/2) * sin(yaw/2)
return Quaternion(x=qx, y=qy, z=qz, w=qw)
- 主函数
def main():
node = StatePublisher()
if __name__ == '__main__':
main()
4 创建启动文件
创建一个新second_ros2_ws/src/urdf_tutorial_r2d2/launch文件夹。
mkdir -p launch

打开编辑器并粘贴以下代码,将其保存为second_ros2_ws/src/urdf_tutorial_r2d2/launch/demo.launch.py
代码如下:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
urdf_file_name = 'r2d2.urdf.xml'
urdf = os.path.join(
get_package_share_directory('urdf_tutorial_r2d2'),
urdf_file_name)
with open(urdf, 'r') as infp:
robot_desc = infp.read()
return LaunchDescription([
DeclareLaunchArgument(
'use_sim_time',
default_value='false',
description='Use simulation (Gazebo) clock if true'),
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
parameters=[{'use_sim_time': use_sim_time, 'robot_description': robot_desc}],
arguments=[urdf]),
Node(
package='urdf_tutorial_r2d2',
executable='state_publisher',
name='state_publisher',
output='screen'),
])
5 编辑setup.py文件
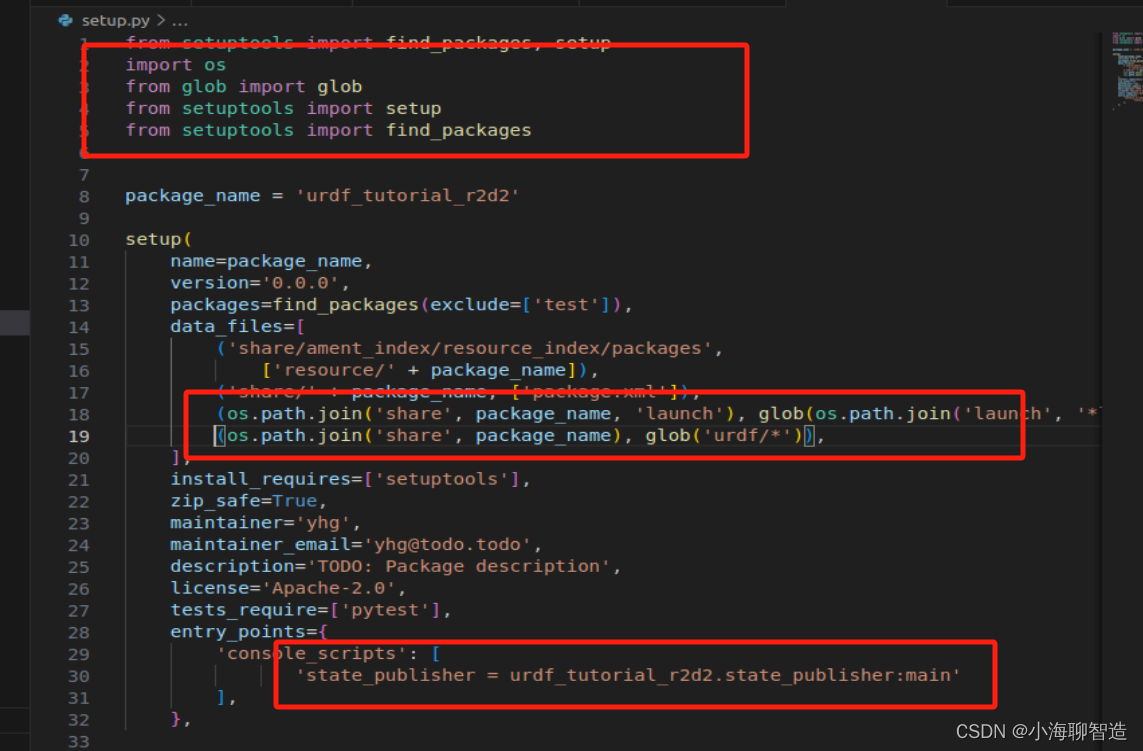
您必须告诉colcon构建工具如何安装 Python 包。second_ros2_ws/src/urdf_tutorial_r2d2/setup.py按如下方式编辑文件:
包括这些导入语句
import os
from glob import glob
from setuptools import setup
from setuptools import find_packages
添加以下两行data_files
data_files=[
...
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*launch.[pxy][yma]*'))),
(os.path.join('share', package_name), glob('urdf/*')),
],
添加的代码位置如下:
保存setup.py更改后的文件
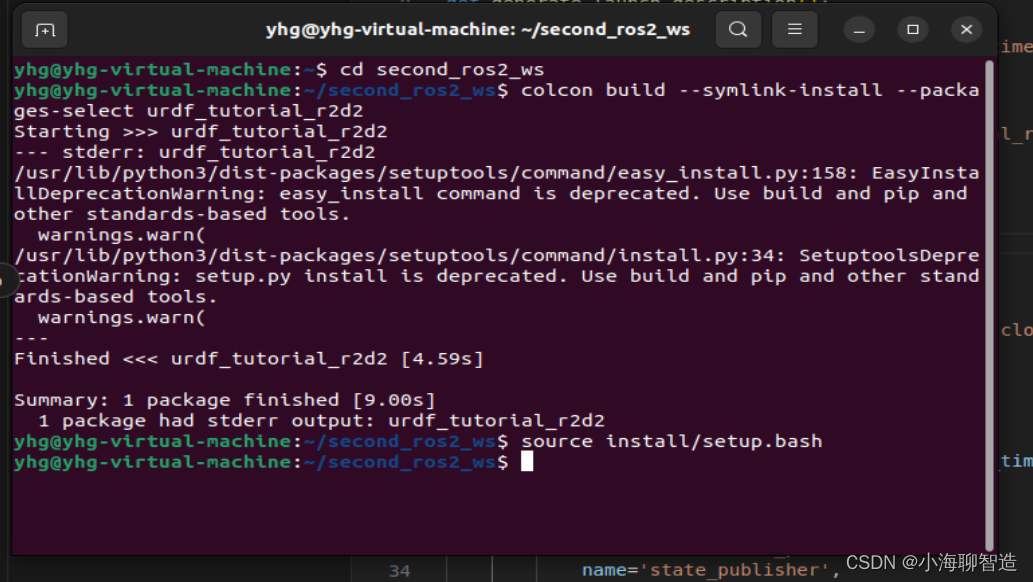
6 安装/编译 软件包
cd second_ros2_ws
colcon build --symlink-install --packages-select urdf_tutorial_r2d2
获取安装文件:
source install/setup.bash
执行结果如下:
7 查看结果
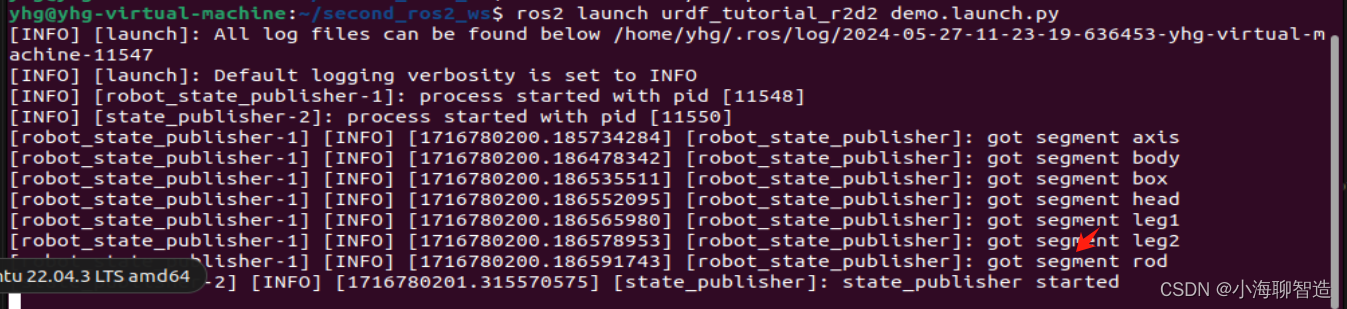
启动包
ros2 launch urdf_tutorial_r2d2 demo.launch.py
运行后报错:

查看是因为launch.py 文件中urdf 文件名定义的后缀有问题
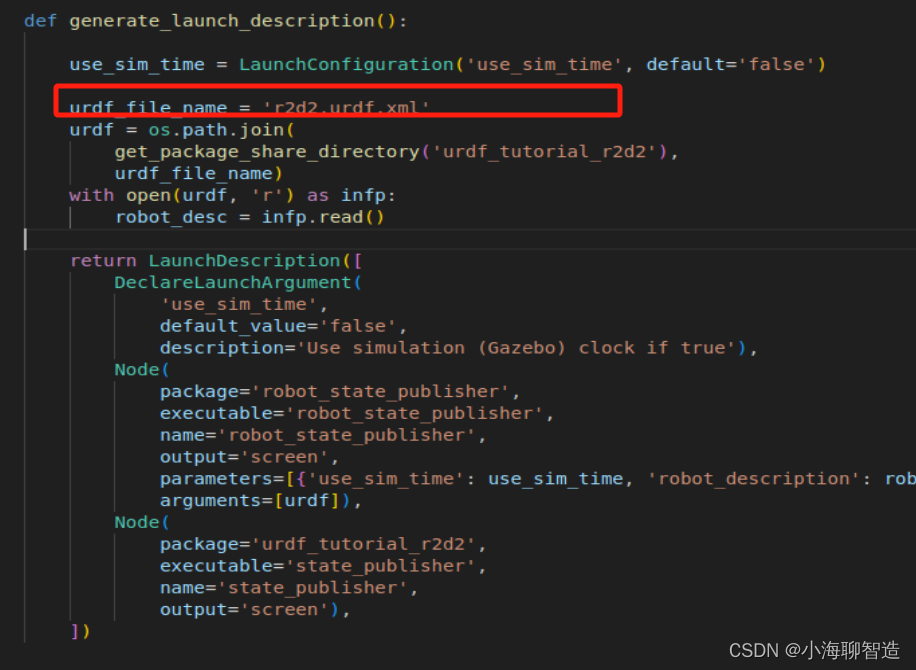
重新修改文件名再重新编译

重新再启动包
运行结果如下:
打开一个新终端,使用以下命令运行 Rviz
新增命令窗口:
rviz2 -d second_ros2_ws/install/urdf_tutorial_r2d2/share/urdf_tutorial_r2d2/r2d2.rviz
运行效果:

















 1673
1673











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











