







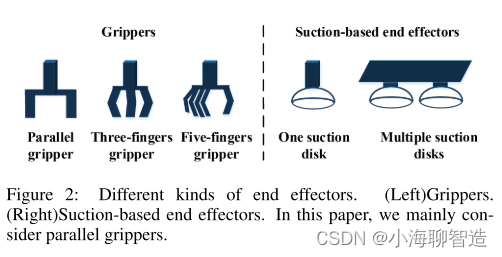
开发一个机械臂抓取物体的系统涉及多个步骤和不同领域的知识,包括机械设计、控制系统、传感器集成、软件开发等。以下是一个全面的开发流程概述:
1. 需求分析与系统设计
需求分析:
- 明确机械臂需要抓取的物体类型(大小、重量、材质等)。
- 确定工作环境(工业生产线、实验室、户外等)。
- 定义系统的性能指标(精度、速度、负载能力等)。
其中的环境考虑尤为重要
系统设计:
- 确定机械臂的自由度(DoF,Degrees of Freedom)。
- 选择合适的机械结构(关节类型、传动方式等)。
- 确定控制架构(中央控制、分布式控制)。

2. 机械设计与制造
机械设计:
使用CAD软件(如SolidWorks、AutoCAD)设计机械臂的各个部件。
进行运动学和动力学分析,确保机械臂能完成预期的运动。(一般厂商可以提供)
制造与装配:
制造或采购各个机械部件。
组装机械臂,进行初步的机械调试。
3. 控制系统开发
硬件选型:
选择合适的控制器(如PLC、嵌入式控制器、工控机等)。
选择合适的电机和驱动器(步进电机、伺服电机等)。
传感器集成:
- 选择并集成各种传感器(位置传感器、力传感器、视觉传感器等)。
- 确保传感器的数据能够准确地反馈给控制系统。
控制算法设计:
- 设计机械臂的运动控制算法(如PID控制、模型预测控制等)。
- 开发路径规划算法(如A*算法、Dijkstra算法等)。
4. 软件开发与集成
软件架构设计:
设计系统的软件架构,包括各模块的接口和通信方式。
运动控制软件开发:
开发机械臂的底层驱动程序,确保电机和传感器的正常工作。
开发运动控制算法,实现机械臂的精确控制。
人机界面(HMI)开发:
开发用户操作界面,使操作人员能够方便地控制和监视机械臂的工作状态。
这是一张人机界面(HMI)开发示例图,展示了用于机械臂控制系统的界面。界面包含以下元素:
- 机械臂的3D模型,显示其当前位置。
- 控制按钮,用于移动机械臂。
- 实时数据展示,显示传感器读数(如位置、速度和力)。
- 错误日志面板,用于记录和显示错误信息。
- 编程路径的图形表示。
5. 系统调试与优化
初步调试:
在实验室环境下对机械臂进行初步调试,确保基本功能正常。
调整机械和控制参数,优化系统性能。
现场调试:
将机械臂安装到实际工作环境中,进行现场调试。
根据现场情况进行进一步优化和调整。
6. 验收与维护
系统验收:
根据需求分析阶段定义的指标对系统进行验收测试。
确保系统满足所有功能和性能要求。
维护与升级:
制定系统的维护计划,定期进行检查和保养。
根据需求进行系统升级和功能扩展。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











