









cartographer学习(4)——论文阅读
代码跑通了,在学习阅读代码之前先来看看其论文是怎么写的。
论文:Real-Time Loop Closure in 2D LIDAR SLAM
1 摘要
5cm精度实时建图与回环检测
为了实现实时回环,使用分支定界算法来计算scan-to-submap作为约束
2 介绍
本文的贡献在于提供了一种新的方法:减少根据激光雷达数据计算回环约束的计算量
3 相关工作
Scan-to-scan matching:雷达数据与雷达数据进行匹配,会很快积累误差
解决方法:粒子滤波和基于图形的SLAM (graph-based)。
粒子滤波要求每个粒子中都能表示完整系统状态,对于基于网格的SLAM,随着地图变大,这很快变成资源密集型。较小维度的特征表示则不需要每个粒子的网格图。当需要最新的栅格地图时,建议计算子地图,这些子地图仅在必要时更新。
Graph-based是一种工作于基于位姿和特征的集合的方法。图中的边表示从观察结果中生成的约束,节点表示的是位姿和特征。可以使用各种优化方法来最小化由所有约束引入的误差。
4 系统概述
接下的第4、5、6部分是重点
谷歌的制图员以装有传感器的背包的形式来生成分辨率为r = 5厘米的2D网格地图。
不使用粒子滤波,使用pose optimization来处理误差累计。
当一个submap结束后,不再有新的扫描被插入其中,它再参与回环检测的扫描。
所有完成的submaps和scans都会自动被考虑到回环检测中。
5 局部2维SLAM
局部方法中,每个连续的扫描与submap M匹配,使用非线性优化将扫描与子地图对齐;这个过程进一步被称为扫描匹配。随着时间的推移,扫描匹配会累积误差,将通过第五节中介绍的全局方法消除这些误差
5.1 Scans
构建submap是重复对齐扫描和子地图坐标帧(也称为帧)的迭代过程。

5.2 submaps
几个连续的scans被用来建立一个子地图。这些子地图采取概率网格M的形式
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-mAhYyCus-1632725332143)(C:\Users\Administrator\AppData\Roaming\Typora\typora-user-images\image-20210926224041296.png)]](https://img-blog.csdnimg.cn/01ebe4d0e24c4199871f2674f6581a2b.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBAaGFuZGlseV8x,size_10,color_FFFFFF,t_70,g_se,x_16)
分辨率r
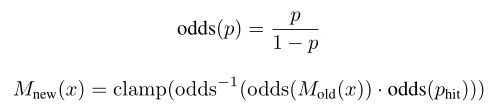
values 被认为是网格点被占用的概率。
将占用和未占用的概率更新为
5.3 Ceres扫描匹配
在将扫描插入子地图之前,使用基于ceres的扫描匹配来对scan相对与当前的local submap进行优化。把它看作一个非线性最小二乘问题:
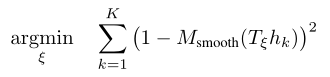
M函数使用双三次插值。
因为这是一个局部优化问题,所以需要用imu提供一个好的角度初始值。在没有惯性测量单元的情况下,可以使用更高频率的扫描匹配或像素精确的扫描匹配方法,尽管计算量更大。
6 回环检测
scans只和最近的submaps进行匹配,所以会产生累积误差。
大多是采用的是创建很多的submaps来解决。
本文中用的方法是优化所有的scans和submaps,这是根据一篇讲解2D建图中的高效稀疏矩阵图优化的文章(Efficient sparse pose adjustment for 2D mapping)来的。
6.1 优化
回环检测的优化问题也和匹配一样是一个非线性最小二乘问题,可以容易的添加残差。每隔几秒,就会使用Ceres计算一次。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ulcnjqHP-1632725332147)(C:\Users\Administrator\AppData\Roaming\Typora\typora-user-images\image-20210927100608728.png)]](https://img-blog.csdnimg.cn/5704b10774b24c8cb1b9c9845eb66c7b.png)
其中Ξm为 submap poses,Ξs为scan poses,ξij相对位姿和∑ij相关协方差矩阵。对于一对匹配好的submap i和scan j,ξij标准scan在submap坐标框中的匹配位置。
残差E计算方式:

当扫描匹配向优化问题添加不正确的约束时,损失函数ρ(例如Huber损失)用于减少(SPA)中可能出现的异常值的影响。
6.2 分支界定扫描匹配

算法一:
通过仔细选择步长可以提高效率。选择角度步长Δθ,所以最大范围dmax处的扫描点移动不能超过一个像素的宽度r。利用余弦定律,我们推导出
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RAvUZFcF-1632725332149)(C:\Users\Administrator\AppData\Roaming\Typora\typora-user-images\image-20210927103643798.png)]](https://img-blog.csdnimg.cn/60d03574f2b74171bafea4808b72dfa9.png)

算法二:
这种算法最初是在 mixed integer linear programs 文章里提出的。其主要思想是将可能的子集表示为树中的节点,其中根节点表示所有可能的解决方案,在本例中为W。每个节点的子节点构成其父节点的分区,因此它们一起表示相同的可能性集。
它提供了与朴素方法相同的解决方案,只要内部节点c的分数是其元素分数的上界。在这种情况下,每当一个节点有界时,该子树中就不存在比目前已知的解更好的解。
为了得到一个具体的算法,我们必须决定节点选择、分支和上界计算的方法。
(1)节点选择
算法使用深度优先搜索(DFS)作为默认选择方法:该算法的效率很大程度上取决于 the tree being pruned。表现在两个方面,一是好的上限和二是好的解决方案。由于我们不希望将较差的匹配添加为循环结束约束,因此我们还引入了一个分数阈值,低于该阈值,不进行优化。
关于DFS期间访问子节点的顺序,我们计算每个子节点得分的上界,首先访问具有最大界的最有希望的子节点。该方法是算法3。
(2) 分支规则
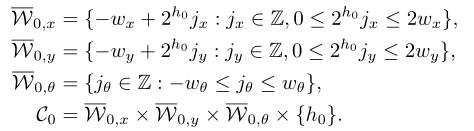
树中的每个节点由一个整型数组 描述,
描述, 

在算法3的公式中,包含所有可行解的根节点没有显式出现,而是在覆盖搜索窗口的固定高度h0处分支为一组初始节点c0:
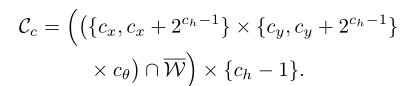
在ch>1的给定节点c上,分支到最多四个高度为ch − 1的子节点:
(3)计算上界
分支定界方法的剩余部分是计算内部节点上界的有效方法,采用:

为了能够高效地计算最大值,使用预计算网格,每一个可能的高度预先计算一个网格,使我们能够以扫描点的数量的线性计算分数。
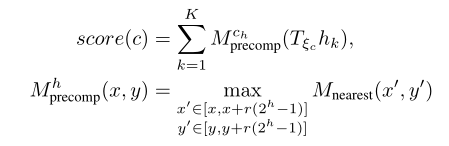
计算上界的另一种方法是计算低分辨率概率网格,将分辨率依次减半。
7 实验结果
这部分不是很重要,有需要去论文里自己看看就行。















 5768
5768











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









