






首先感谢 四处炼丹 大佬的教程分享:
其中包括两种可视化方法:
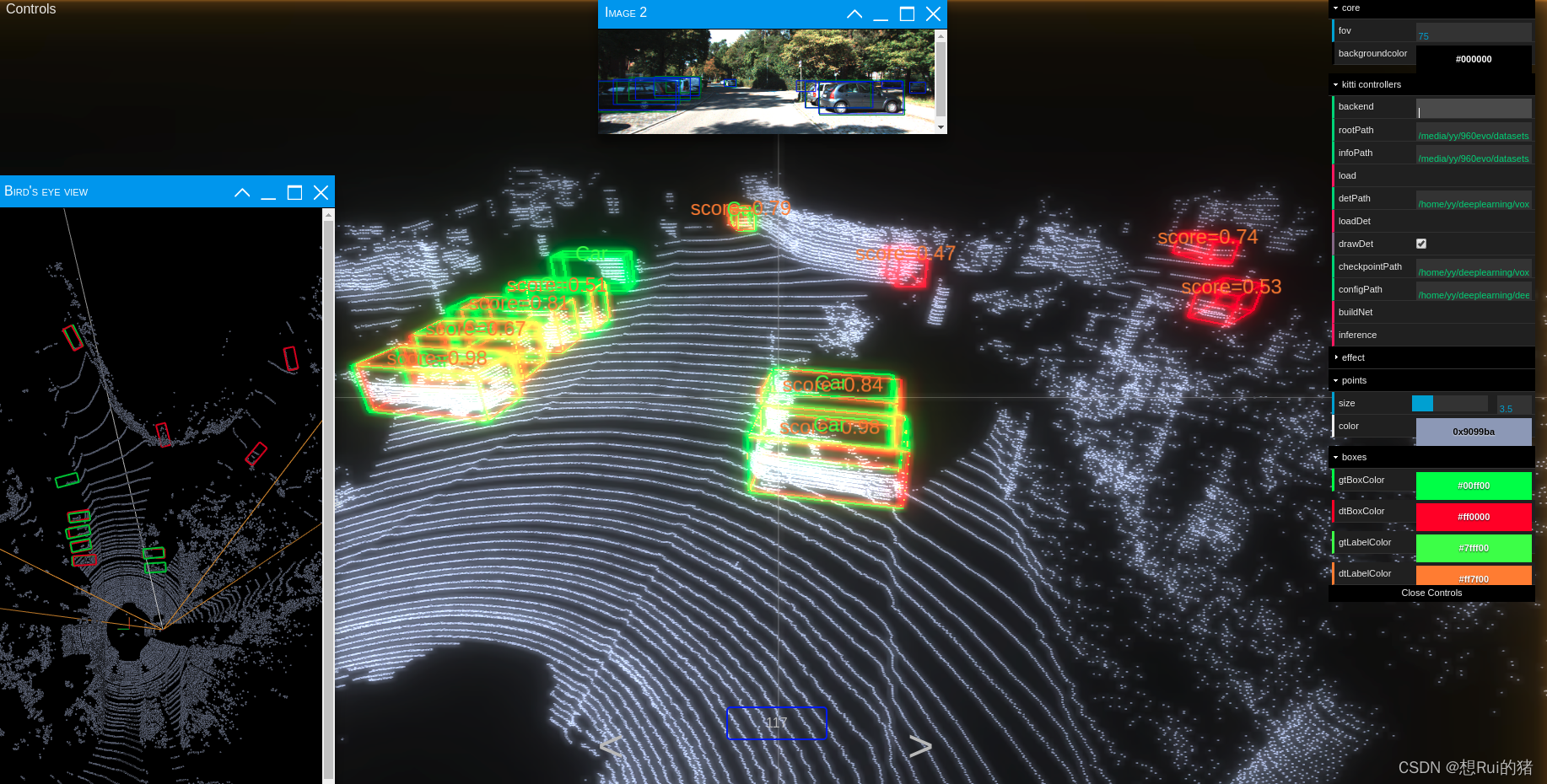
一、Kittiview(网站打开)的方法,效果图如下(转用):
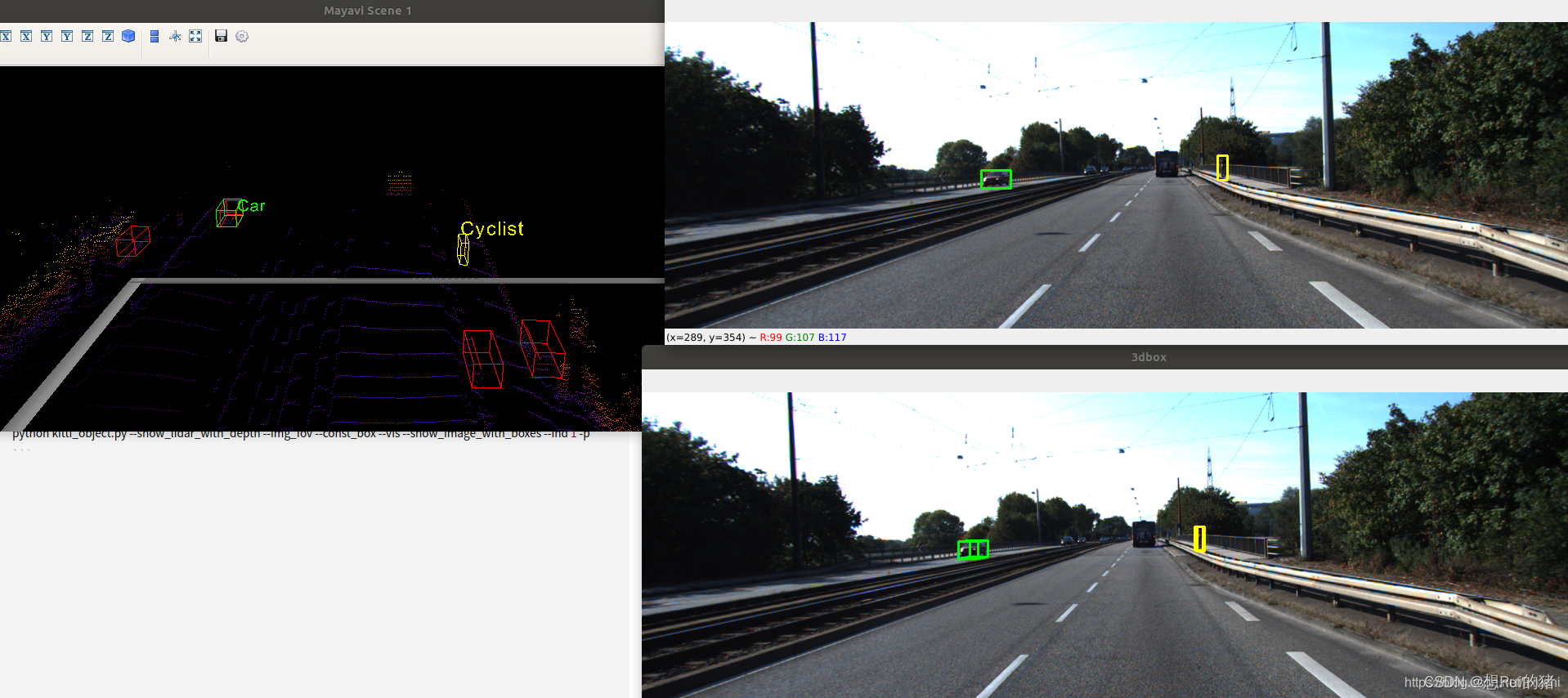
二、kitti_object_vis的方法,效果图如下(转用):
其中包含很多功能:比如俯视图、点云投影到图像上、只显示GT(标注框)、只显示DT(检测框)、DT+GT等等功能。
三、下面我将介绍另外三种可视化方法:
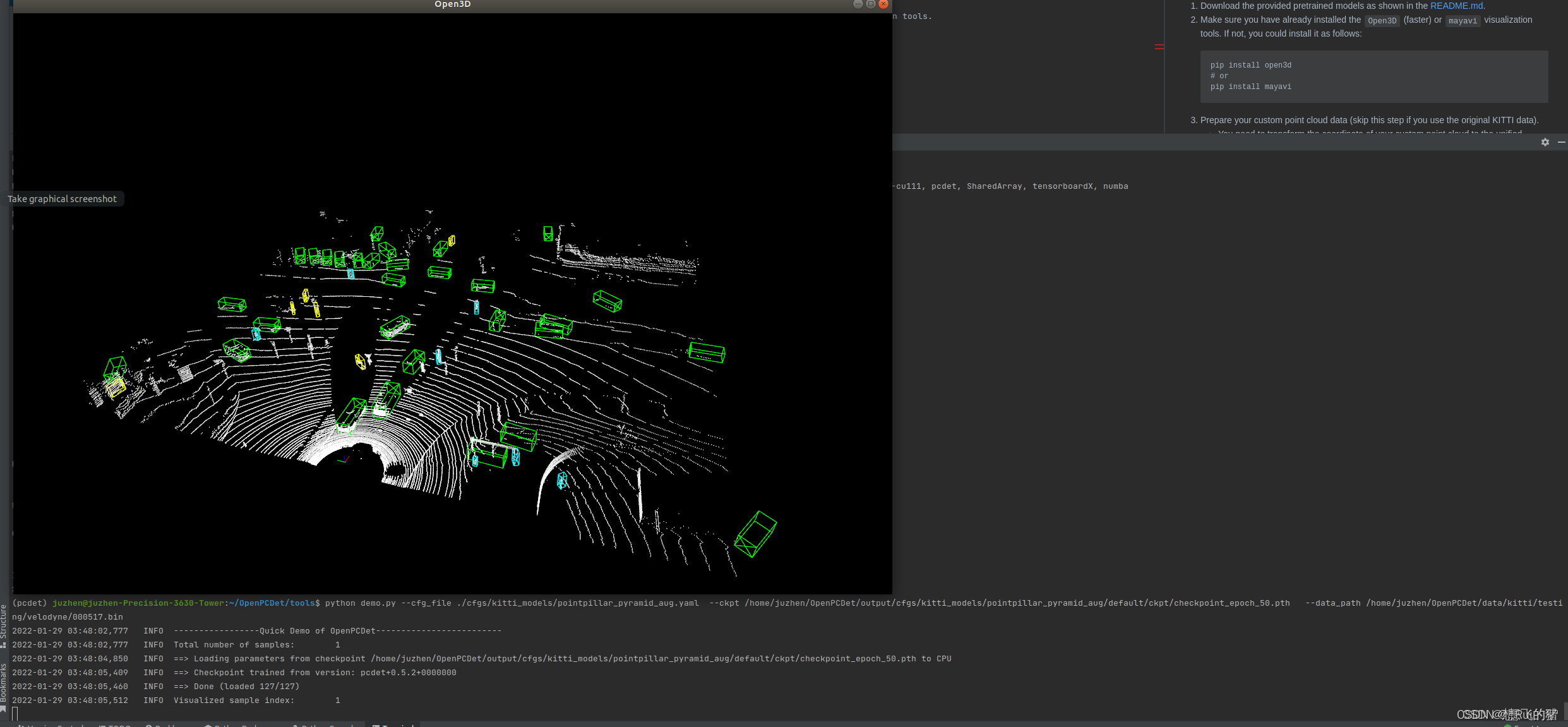
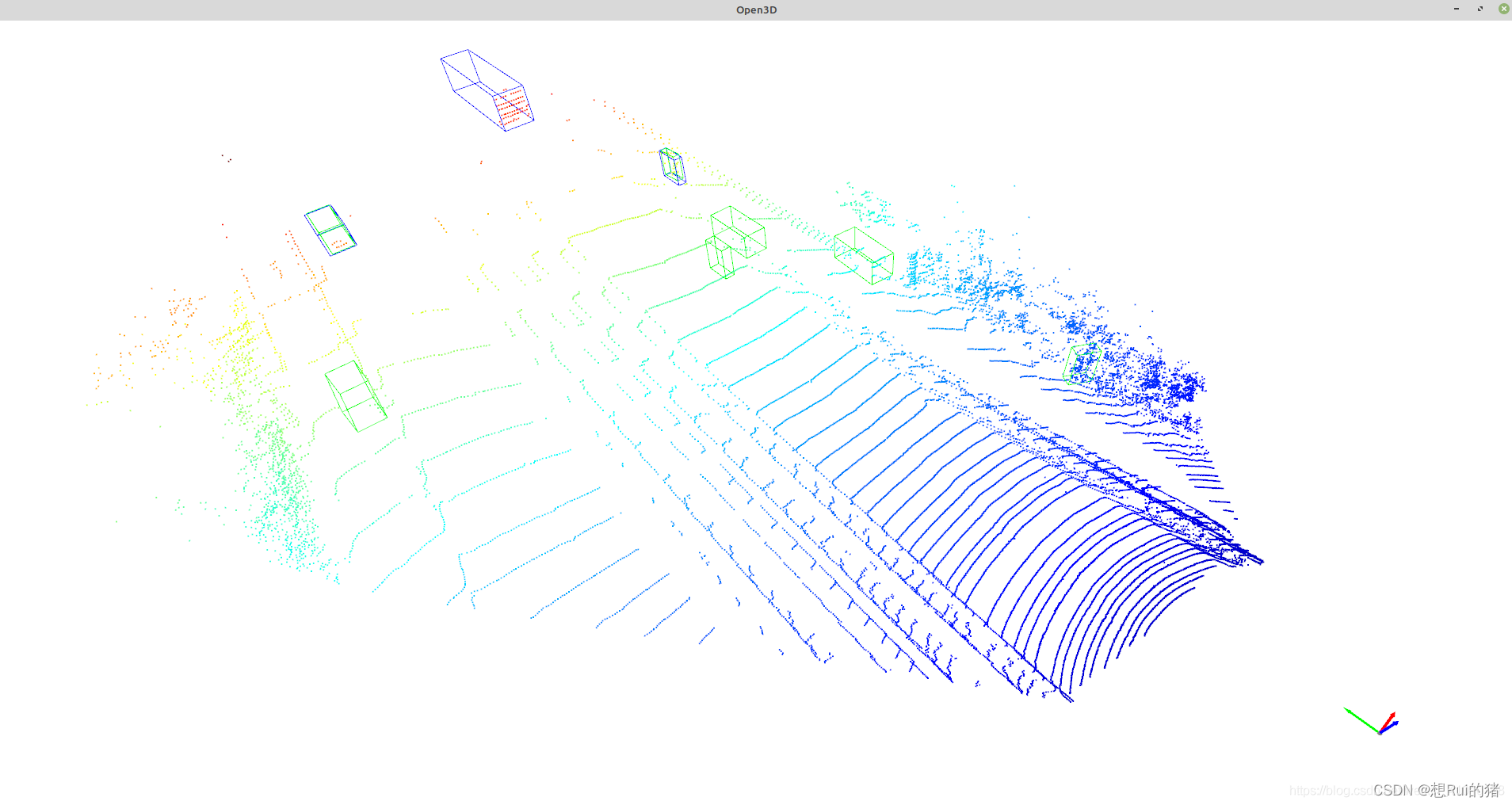
1.OpenPCDet可视化方法
参考我的另一篇文章,效果如下(上图用的open3d可视化工具、下图用的mayavi可视化工具):

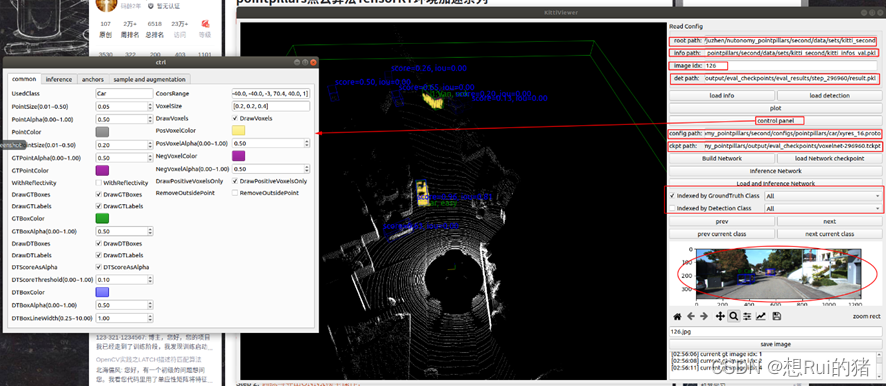
2. Kittiviewer(窗口打开)方法
Second作者的github网址,链接1
Pointpillars的另外一个官网(可转换pfe.onnx和rpn.onnx模型),链接2
配置上面任意一个的环境,训练后即可用窗口的Kittiviewer可视化其检测结果,其中链接2在训练、评估、转换后:
安装依赖库
pip install pyOpenGL -i https://pypi.douban.com/simple
pip install pyqtgraph
pip install pyqt5
然后输入
python ./kittiviewer/viewer.py
效果和操作如下图:
3. open3d可视化 mm3d官方github网址
pip install open3d
该可视化方法指导网址:https://mmdetection3d.readthedocs.io/en/latest/useful_tools.html#visualization
效果如下(转用):

















 225
225

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









