







一、概述
相比起用于ADAS感知系统的摄像头,用于智能座舱内部的摄像头,其功能特性和性能要求相对简单。例如,OMS乘客监控摄像头,一般达到5MP即可有良好的效果。同时,OMS也可应用于车内会议系统,还应用于车内儿童检测。DMS驾驶员监测系统,SVC 360环视摄像头,DVR行车记录仪,均为自动驾驶域ADC与智能座舱域CDC共用的摄像头。下文将简要介绍这些摄像头的使用方式。
对于车载摄像头来说,它的特点在于摄像头的安装位置,和ISP处理芯片之间的距离。在2MP以下的摄像头,一般会直接输出YUV格式的图像数据,无需额外的ISP进行图像处理。而2MP以上,则摄像头会输出raw原始数据,需要有独立的ISP进行摄像头图像格式处理。由于摄像头使用数目很多,如果每个摄像头都安排一个ISP,那么成本将非常巨大。因此需要将ISP安排在CDC座舱控制器内部,而通过高速传输线缆将摄像头的raw数据传送到集中式的ISP来进行处理。此时就需要使用高速视频传输总线。
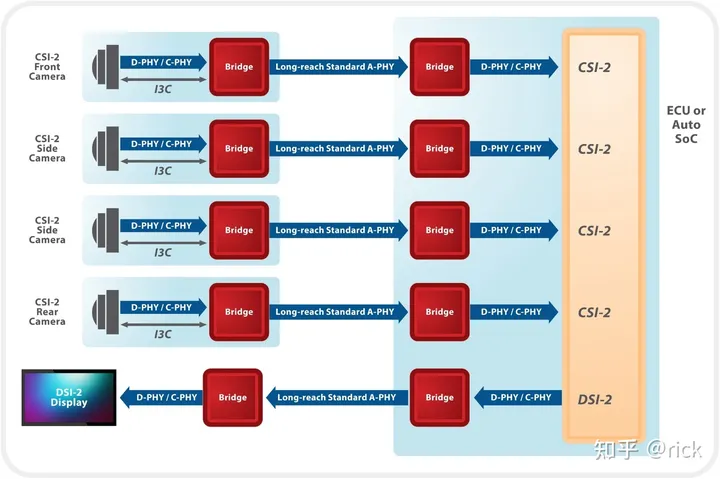
如同高速音视频传输接口章节所描述的一样,此时一般使用GMSL或者FPDlink,实现远端Camera的raw数据传输到CDC中来。未来还可能采用的技术有Mipi-A phy 和ASA。此时SerDes串行解串器芯片一般成对设置,在摄像头端集成有serializer chip;在CDC端则设计有desierializer chip;它们之间的距离可以长达10米,最长不超过15米。
作为Camera传输的桥接芯片和传输数据线,可以参考如下图片了解:
二、 OMS
OMS(Occupant Monitor System) 乘客及后座检测系统的简称。在法规上,已经有不少地区和国家在立法要求进行车内儿童检测。欧洲NCAP计划从2023年1月起增加对车内儿童存在检测的评分,各项规定非常细致。美国正在立法要求所有新车预装儿童存在检测功能,预计在2025年全面实施。据说国内相关规范也在评估制订中。
OMS摄像头可以在一定程度上满足车内儿童存在检测的要求。为了提高检测的准确性,甚至还要求增加生命体征检测雷达(UWB或者毫米波雷达)。从目前的实践来看,一般在前排后视镜位置布置一颗5MP,甚至8MP的OMS主摄像头;在第二排第三排座位上方增加2MP的后排OMS。通过人脸识别,动作捕获,活体检测等AI算法的应用,OMS可以提升智能座舱车内的感知。
OMS还可以为如下应用功能提供支持:车内视频会议系统;安全支付系统;人工智能助手融合感知系统等。
为了保证在座舱环境内任何光照强度下都能正常使用,OMS一般要求支持RGB-IR,可见光和红外光双波段工作模式,同时需要布置红外补光灯。在夜间可以采用IR红外光进行检测;在白天采用RGB可见光进行工作。
2.1 TOF
TOF是Time of flight的简写,直译为飞行时间的意思。所谓飞行时间法3D成像,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度信息。TOF相机与普通机器视觉成像过程也有类似之处,都是由光源、光学部件、传感器、控制电路以及处理电路等几部单元组成。与同属于非嵌入式三维探测、适用领域非常类似的双目测量系统相比,TOF相机具有根本不同的3D成像机理。双目立体测量通过左右立体像对匹配后,再经过三角测量法来进行立体探测,而TOF相机是通过入、反射光探测来获取的目标距离。
由于TOF采用
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2216
2216

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









