






自动驾驶控制算法 -车辆运动学模型
在自动驾驶控制算法的分析设计中,离不开对车辆运动学模型的分析,我们熟知的自行车模型就是对四轮车辆模型的近似简化,该模型应用十分广泛。接下去,将分别介绍全局坐标系和道路坐标系(Frenet坐标系)下自行车模型的运动学方程。
附赠自动驾驶最全的学习资料和量产经验以及1000T的资源分享:链接
1. 全局坐标系下运动学模型

图1 全局坐标系下的车辆运动学模型
如图1所示,为全局坐标系下的车辆运动学模型,自行车模型通过简化将四轮的车辆变成前后两轮的形式,同时假设车轮没有横向滑移,且只有前轮可操纵。将该模型限制为在平面内运动,则前轮和后轮的非完整约束方程为:
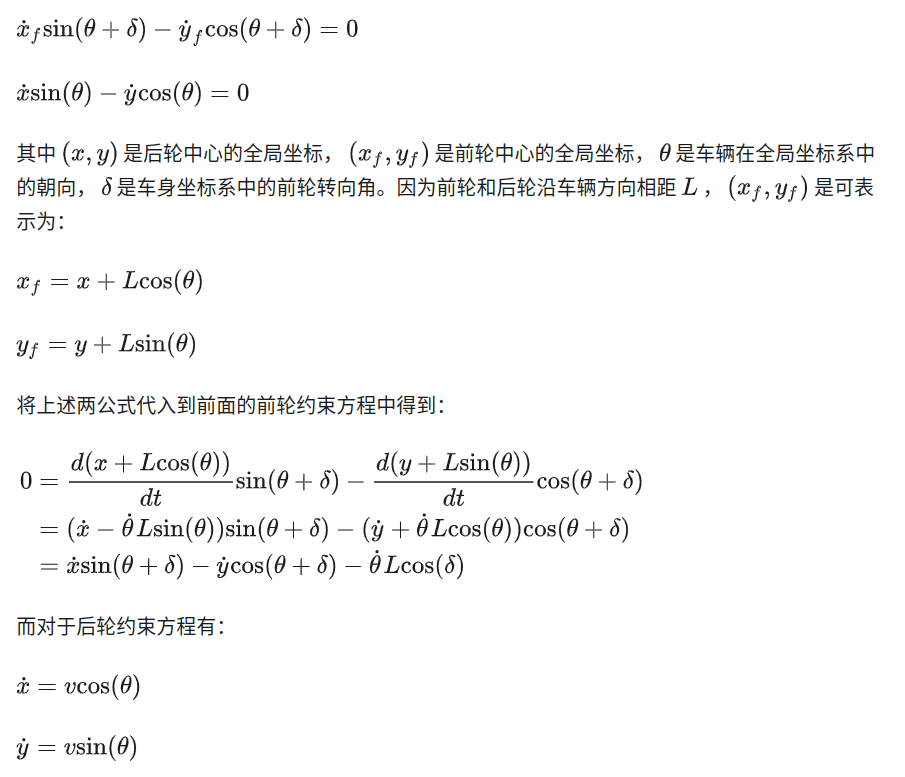
将上述两公式代入到前面的前轮约束方程中得到:
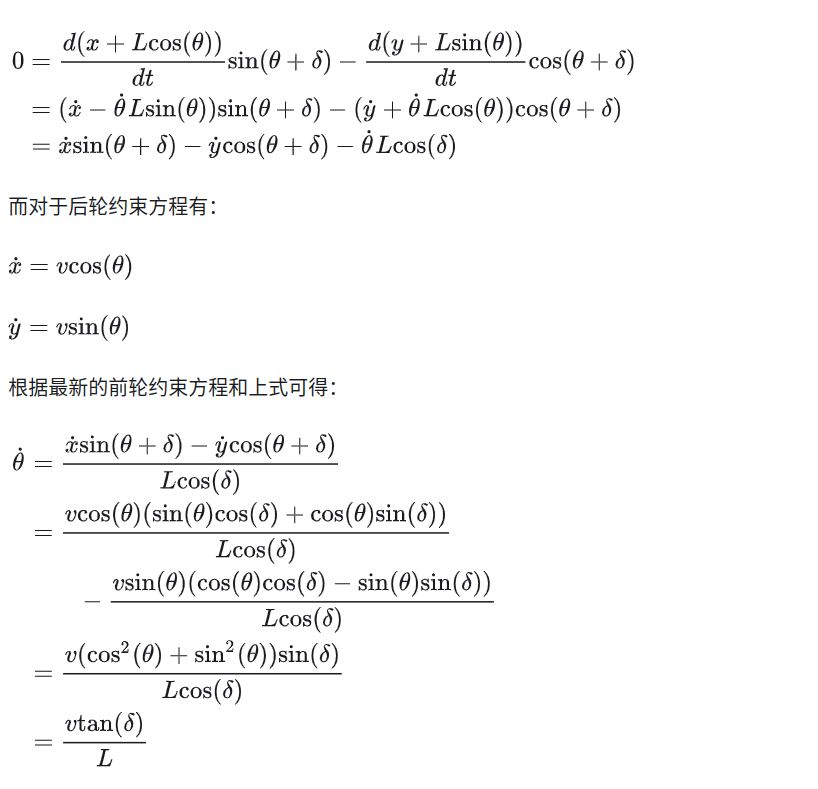
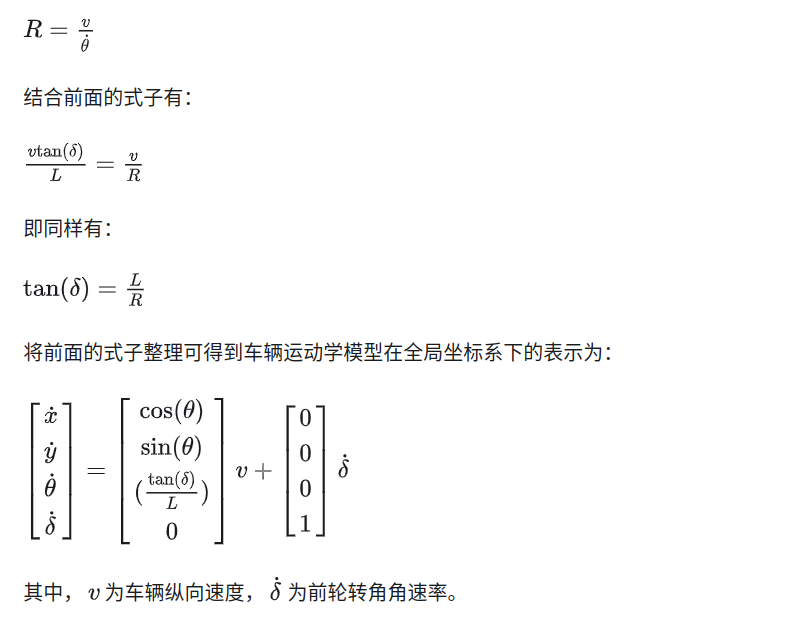
后轮中心运动的瞬时圆周半径 R可表示为:
2. 道路坐标系下运动学模型
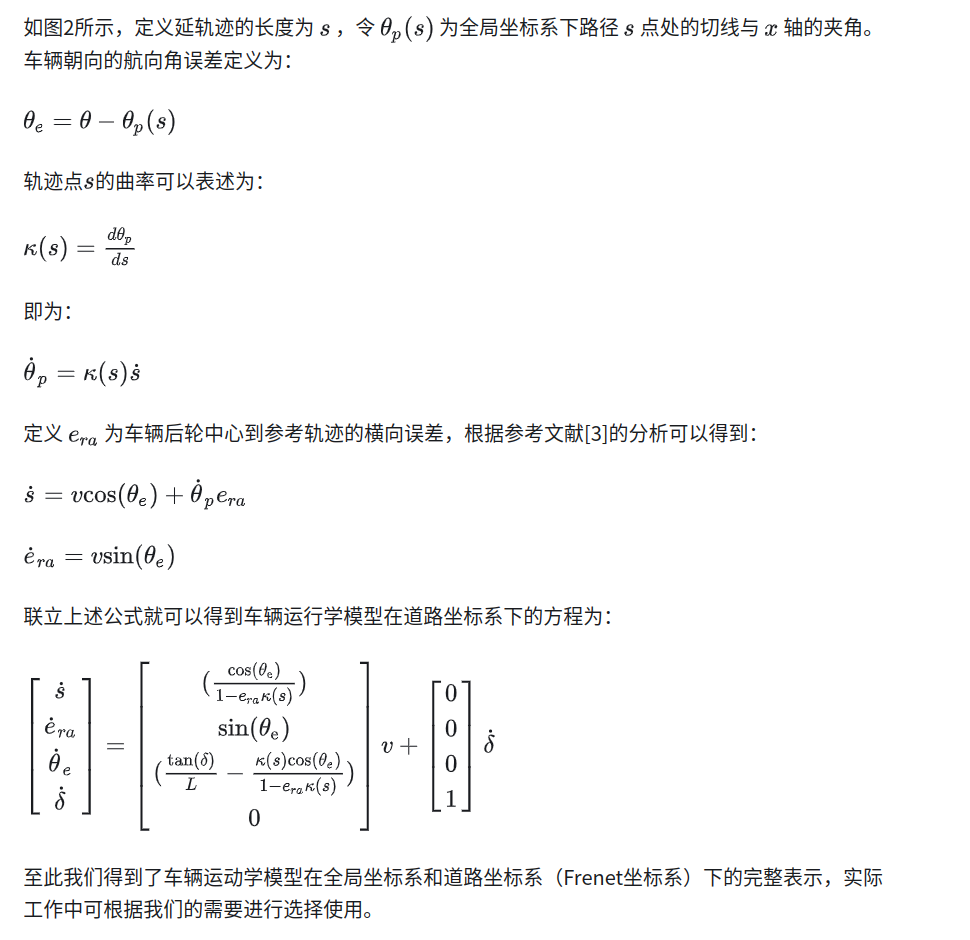
很多规控算法是在道路坐标系下进行分析的,为此我们构建车辆运动学模型在道路坐标系(也是Frenet坐标系)下的方程。

图2 道路坐标系下的车辆运动学模型
参考文献:
-
[1] Snider J M . Automatic Steering Methods for Autonomous Automobile Path Tracking[J]. Robotics Institute, 2011.
-
[2] Luca A D , Oriolo G , Samson C . Feedback control of a nonholonomic car-like robot[J]. Springer Berlin Heidelberg, 1998.
-
[3] Samson, “Control of chained systems. Application to path following and timevarying point-stabilization of mobile robots,” IEEE Trans. on Automatic Control, vol. 40, no. 1, pp. 64–77, 1995.















 879
879

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









