









本节是对激光SLAM课程中图优化课程理论学习后的代码实现及对应理论说明。
1.要完成的工作
1)需要实现Jacobian矩阵和误差项的计算。
2)需要构建线性系统。
2.要达到的目标
利用高斯牛顿方法进行全局优化。
3.测试结果
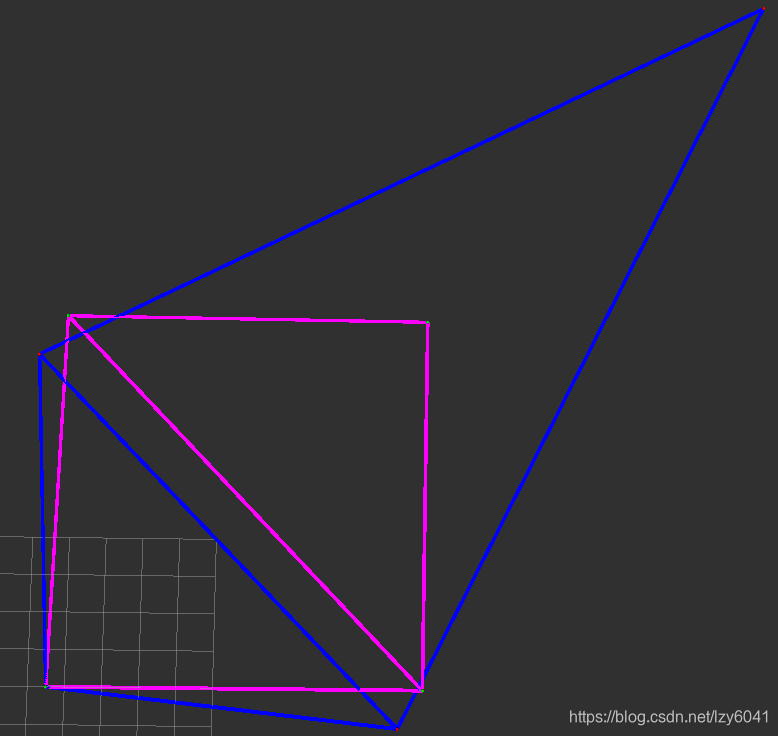
上图是对test_quadrat数据集合的测试结果。蓝色为优化前的位姿轨迹,粉色为优化后的位姿轨迹。
4.关键函数及对应理论分析
4.1 主函数
主函数主要分为四个部分:
1).从本地读取节点及边的数据,保存到Vertexs、Edges向量中,并在rviz显示。
std::vector<Eigen::Vector3d> Vertexs;//定义一个3*1的向量,存放节点数据
std::vector<Edge> Edges;//定义一个向量,存放边的数据xi,xj,测量值,信息矩阵
ReadVertexInformation(VertexPath,Vertexs);//读取节点信息,存放在Vertexs向量中
ReadEdgesInformation(EdgePath,Edges);//读取边的信息,存放在Edges向量中
PublishGraphForVisulization(&beforeGraphPub,Vertexs,Edges);
关于数据的说明:
节点数据:
VERTEX2 0 0.5 1 0
VERTEX2 1 10 0 1.570796
VERTEX2 2 20 20 3.14159
VERTEX2 3 0 10 -1.570796
说明:
关于节点的数据结构:
std::vector<Eigen::Vector3d>& nodes
将以上数据从result[]传递给nodes。
int id = stringToNum<int>(results[1]);
double x = stringToNum<double>(results[2]);
double y = stringToNum<double>(results[3]);
double theta = stringToNum<double>(results[4]);
Eigen::Vector3d pose(x,y,theta);
nodes.push_back(pose);
边数据:
EDGE2 0 1 10.2 0 0 500.000000 0.000000 500.000000 5000.000000 0.000000 0.000000
EDGE2 1 2 10 0 0 500.000000 0.000000 500.000000 5000.000000 0.000000 0.000000
EDGE2 2 3 9.9 0 0 500.000000 0.000000 500.000000 5000.000000 0.000000 0.000000
EDGE2 3 0 10.1 0 0 500.000000 0.000000 500.000000 5000.000000 0.000000 0.000000
EDGE2 3 1 9.8 10.1 3.1415 500.000000 0.000000 500.000000 5000.000000 0.000000 0.000000
说明:
关于边的数据结构定义:
typedef struct edge
{
int xi,xj;
Eigen::Vector3d measurement;
Eigen::Matrix3d infoMatrix;
}Edge;
std::vector<Edge>& edges
将以上数据从result[]传递给Edge。
int xi = stringToNum<int>(results[1]);
int xj = stringToNum<int>(results[2]);
double dx = stringToNum<double>(results[3]);
double dy = stringToNum<double>(results[4]);
double dtheta = stringToNum<double>(results[5]);
double inf_xx = stringToNum<double>(results[6]);
double inf_xy = stringToNum<double>(results[7]);
double inf_yy = stringToNum<double>(results[8]);
double inf_tt = stringToNum<double>(results[9]);
double inf_xt = stringToNum<double>(results[10]);
double inf_yt = stringToNum<double>(results[11]);
Edge tmpEdge;
tmpEdge.xi = xi;
tmpEdge.xj = xj;
tmpEdge.measurement = Eigen::Vector3d(dx,dy,dtheta);
tmpEdge.infoMatrix << inf_xx,inf_xy,inf_xt,
inf_xy,inf_yy,inf_yt,
inf_xt,inf_yt,inf_tt;
edges.push_back(tmpEdge)
2).计算整个pose-graph的误差(优化前的误差)
double initError = ComputeError(Vertexs,Edges);
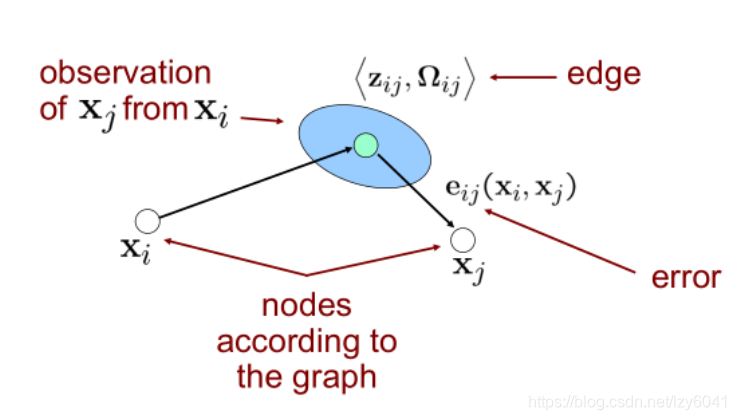
对误差函数的理解
x
i
x_i
xi,
x
j
x_j
xj是由里程计得到两点在世界坐标系下的坐标,对应到世界坐标系的转换矩阵就可以得到是
X
i
X_i
Xi,
X
j
X_j
Xj,由雷达观测得到
j
j
j时刻,在
x
i
x_i
xi的坐标系下的位置是三维向量
z
i
j
z_{ij}
zij,可以得到转换矩阵
Z
i
j
Z_{ij}
Zij。
两者转换代码如下:
//位姿-->转换矩阵
Eigen::Matrix3d PoseToTrans(Eigen::Vector3d x)
{
Eigen::Matrix3d trans;
trans << cos(x(2)),-sin(x(2)),x(0),
sin(x(2)), cos(x(2)),x(1),
0, 0, 1;
return trans;
}
//转换矩阵-->位姿
Eigen::Vector3d TransToPose(Eigen::Matrix3d trans)
{
Eigen::Vector3d pose;
pose(0) = trans(0,2);
pose(1) = trans(1,2);
pose(2) = atan2(trans(1,0),trans(0,0));
return pose;
}
误差定义就是里程计得到的位置,在雷达观测值位置坐标系下的位置。先求 E i j E_{ij} Eij,再转换为三维向量 e i j e_{ij} eij,设在 x j x_j xj坐标系下一点 m m m,点 m m m在世界坐标系下的位置就是 X j × m X_j×m Xj×m,也可以写成 X i × Z i j × E i j × m X_i×Z_{ij}×E_{ij}×m Xi×Zij×Eij×m。
即有
X
i
×
Z
i
j
×
E
i
j
=
X
j
X_i×Z_{ij}×E_{ij}=X_j
Xi×Zij×Eij=Xj,
所以
E
i
j
=
Z
i
j
.
i
n
v
∗
X
i
.
i
n
v
∗
X
j
Eij = Z_{ij}.inv * X_i.inv * Xj
Eij=Zij.inv∗Xi.inv∗Xj ,再转换为向量形式。
X
i
.
i
n
v
∗
X
j
X_i.inv * X_j
Xi.inv∗Xj的向量表示
x
j
x_j
xj原点在
x
i
x_i
xi坐标系下坐标。
double ComputeError(std::vector<Eigen::Vector3d>& Vertexs,
std::vector<Edge>& Edges)
{
double sumError = 0;
for(int i = 0; i < Edges.size();i++)
{
Edge tmpEdge = Edges[i];
Eigen::Vector3d xi = Vertexs[tmpEdge.xi];
Eigen::Vector3d xj = Vertexs[tmpEdge.xj];
Eigen::Vector3d z = tmpEdge.measurement;
Eigen::Matrix3d infoMatrix = tmpEdge.infoMatrix;
Eigen::Matrix3d Xi = PoseToTrans(xi);
Eigen::Matrix3d Xj = PoseToTrans(xj);
Eigen::Matrix3d Z = PoseToTrans(z);
Eigen::Matrix3d Ei = Z.inverse() * Xi.inverse() * Xj;
Eigen::Vector3d ei = TransToPose(Ei);
sumError += ei.transpose() * infoMatrix * ei;
}
return sumError;
}
3).线性化与求解
Eigen::VectorXd dx = LinearizeAndSolve(Vertexs,Edges);
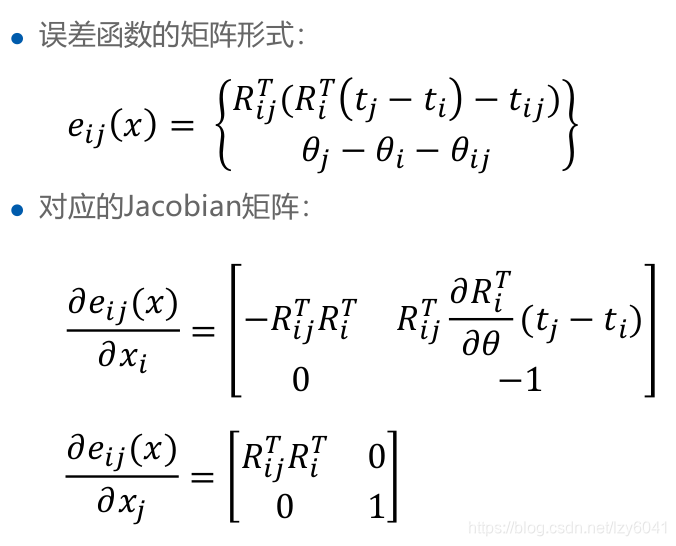
雅克比矩阵推导,
e
i
j
e_{ij}
eij由
E
i
j
E_{ij}
Eij推导而来的向量形式,
X
i
.
i
n
v
∗
X
j
X_i.inv * X_j
Xi.inv∗Xj的向量表示
x
j
x_j
xj原点在
x
i
x_i
xi坐标系下坐标, 然后对
x
i
,
x
j
x_i,x_j
xi,xj的
(
x
,
y
,
t
h
e
t
a
)
(x,y,theta)
(x,y,theta)求导,得到雅克比矩阵。
/**
* @brief CalcJacobianAndError
* 计算jacobian矩阵和error
* @param xi fromIdx
* @param xj toIdx
* @param z 观测值:xj相对于xi的坐标
* @param ei 计算的误差
* @param Ai 相对于xi的Jacobian矩阵
* @param Bi 相对于xj的Jacobian矩阵
*/
void CalcJacobianAndError(Eigen::Vector3d xi,Eigen::Vector3d xj,Eigen::Vector3d z,
Eigen::Vector3d& ei,Eigen::Matrix3d& Ai,Eigen::Matrix3d& Bi)
{
//TODO--Start
Eigen::Matrix3d Xi = PoseToTrans(xi);
Eigen::Matrix3d Xj = PoseToTrans(xj);
Eigen::Matrix3d Z = PoseToTrans(z);
Eigen::Matrix3d Ei = Z.inverse() * Xi.inverse() * Xj;
//误差 ei
ei = TransToPose(Ei);
Eigen::Matrix2d Rxi = Xi.block(0,0,2,2);
Eigen::Matrix2d Rij = Z.block(0,0,2,2);
Eigen::Vector2d ti,tj;
ti << xi(0),xi(1);
tj << xj(0),xj(1);
double theta = xi(2);
Eigen::Matrix2d dRxi;
dRxi << -sin(theta),cos(theta),
-cos(theta),-sin(theta);
//jacobian
Ai.setZero();
//matrix.block(i,j,p,q);表示返回从矩阵的(i, j)开始,每行取p个元素,每列取q个元素所组成的临时新矩阵对象,原矩阵的元素不变。
Ai.block(0,0,2,2) = - Rij.transpose() * Rxi.transpose();
Ai.block(0,2,2,1) = Rij.transpose() * dRxi * (tj - ti);
Ai(2,2) = -1;
Bi.setZero();
Bi.block(0,0,2,2) = Rij.transpose() * Rxi.transpose();
Bi(2,2) = 1;
//TODO--end
}
非线性最小二乘优化
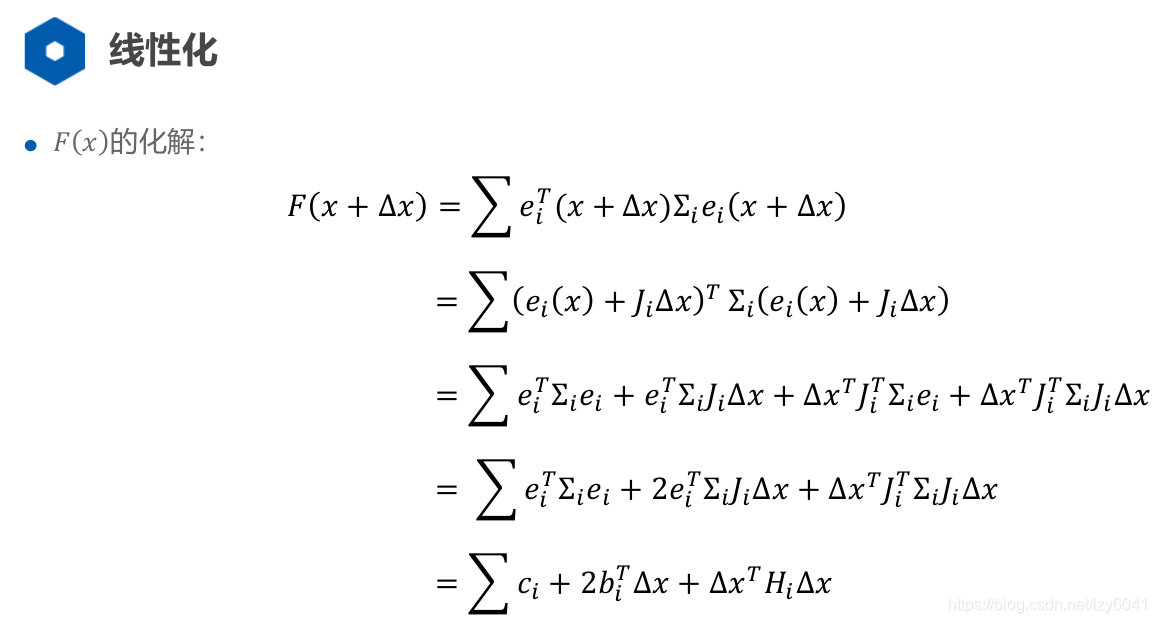
循环每一条边(约束),求出该边的误差项
e
i
e_i
ei和雅克比矩阵,按上图构造出
b
b
b和
H
H
H,叠加。
函数体如下:
/**
* @brief LinearizeAndSolve
* 高斯牛顿方法的一次迭代.
* @param Vertexs 图中的所有节点
* @param Edges 图中的所有边
* @return 位姿的增量
*/
Eigen::VectorXd LinearizeAndSolve(std::vector<Eigen::Vector3d>& Vertexs,std::vector<Edge>& Edges)
{
//申请内存
Eigen::MatrixXd H(Vertexs.size() * 3,Vertexs.size() * 3);
Eigen::VectorXd b(Vertexs.size() * 3);
H.setZero();
b.setZero();
//固定第一帧
Eigen::Matrix3d I;
I.setIdentity();
H.block(0,0,3,3) += I;
//构造H矩阵 & b向量
for(int i = 0; i < Edges.size();i++)
{
//提取信息
Edge tmpEdge = Edges[i];
Eigen::Vector3d xi = Vertexs[tmpEdge.xi];
Eigen::Vector3d xj = Vertexs[tmpEdge.xj];
Eigen::Vector3d z = tmpEdge.measurement;
Eigen::Matrix3d infoMatrix = tmpEdge.infoMatrix;
//计算误差和对应的Jacobian
Eigen::Vector3d ei;
Eigen::Matrix3d Ai;
Eigen::Matrix3d Bi;
CalcJacobianAndError(xi,xj,z,ei,Ai,Bi);
Eigen::Matrix3d Hii,Hij,Hji,Hjj;
Hii = Ai.transpose() * infoMatrix * Ai;
Hij = Ai.transpose() * infoMatrix * Bi;
Hji = Bi.transpose() * infoMatrix * Ai;
Hjj = Bi.transpose() * infoMatrix * Bi;
int idx = tmpEdge.xi;
int jdx = tmpEdge.xj;
H.block(3*idx,3*idx,3,3) += Hii;
H.block(3*idx,3*jdx,3,3) += Hij;
H.block(3*jdx,3*idx,3,3) += Hji;
H.block(3*jdx,3*jdx,3,3) += Hjj;
Eigen::Vector3d bi,bj;
bi = (ei.transpose() * infoMatrix * Ai).transpose();
bj = (ei.transpose() * infoMatrix * Bi).transpose();
b(3*idx) += bi(0);
b(3*idx+1) += bi(1);
b(3*idx+2) += bi(2);
b(3*jdx) += bj(0);
b(3*jdx+1) += bj(1);
b(3*jdx+2) += bj(2);
}
















 2815
2815











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









