






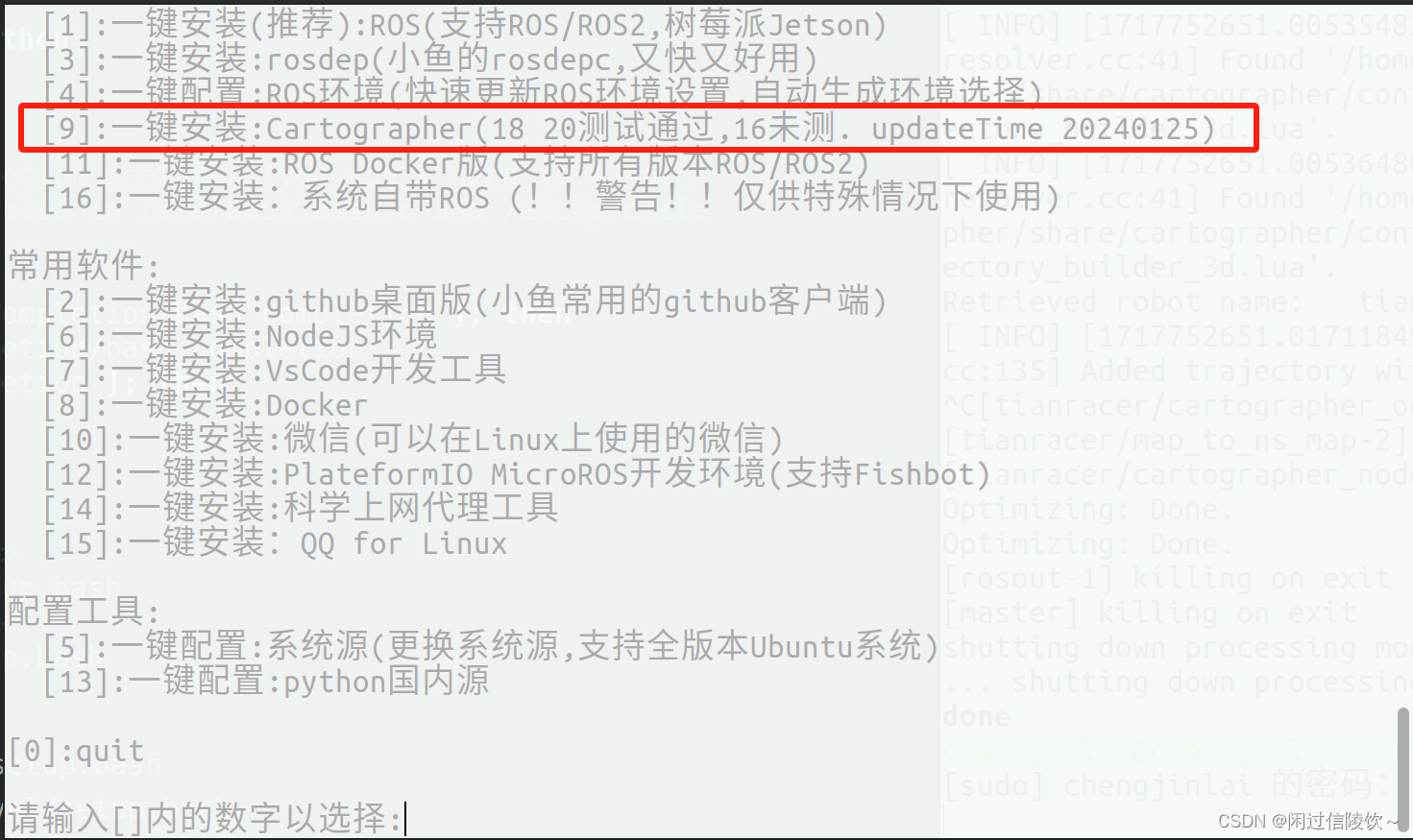
小鱼一键安装指令
wget http://fishros.com/install -O fishros && . fishros选择9安装cartographer
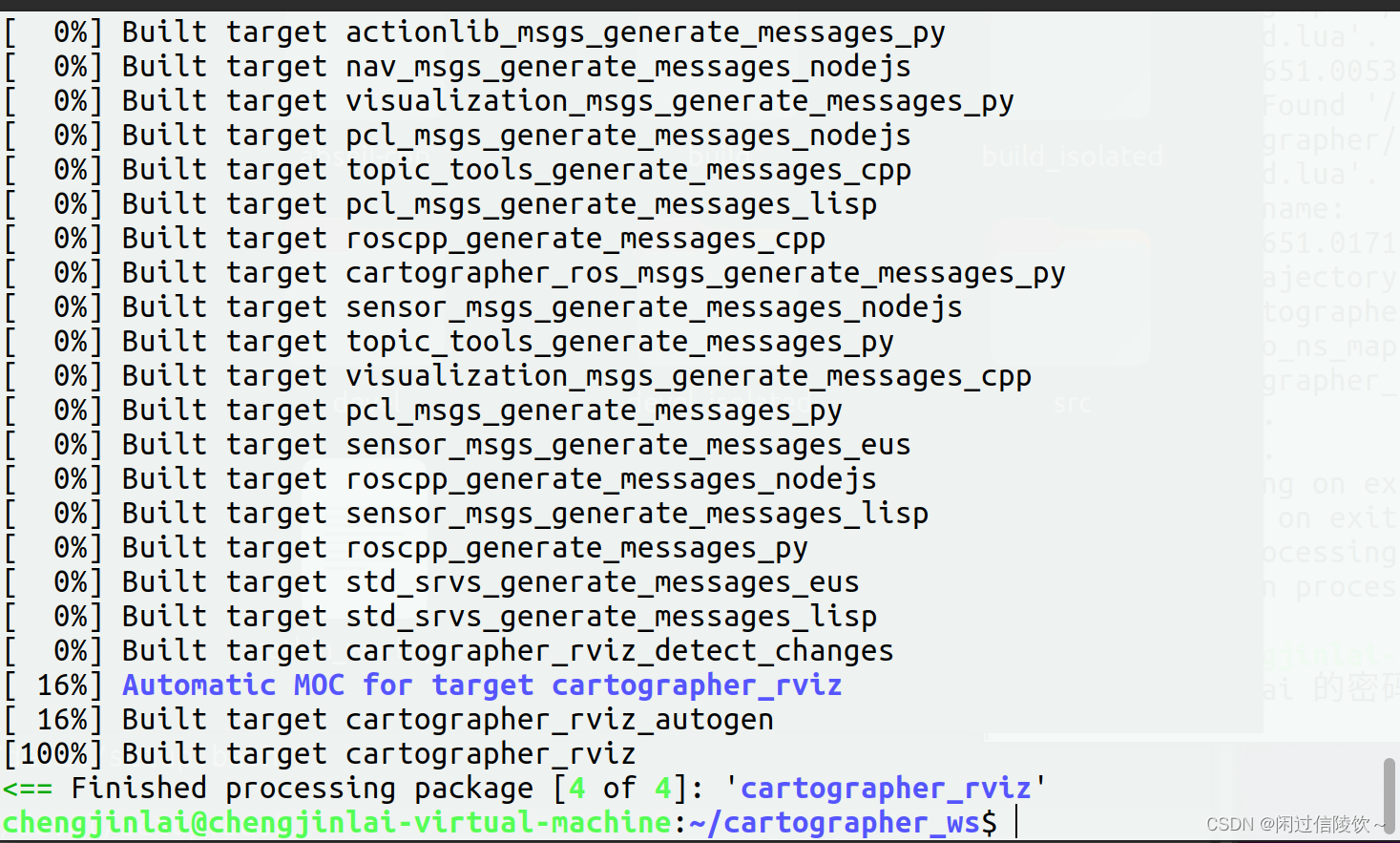
安装成功后找到并进入自动安装所创建的工作空间cartographer_ws(其位于启动小鱼脚本的目录下),输入catkin_make_isolated编译工作空间,该命令支持存在非catkin包的工作空间的编译
catkin_make_isolated编译成功
输入 sudo gedit ~/.bashrc设置总环境变量
sudo gedit ~/.bashrc在~/.bashrc最后添加 source /工作空间/devel_isolated/setup.bash\

随后可正常使用















 1963
1963











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









