






 本文介绍了几种不同的轨迹规划方法,包括五次多项式轨迹tpoly用于单维平滑插值,lspb实现速度变化的混合曲线轨迹,mtraj用于二维多维插值,以及mstraj用于构建多段多维轨迹。这些方法考虑了速度限制、插值间隔和加速时间等因素,适用于机器人运动规划。
本文介绍了几种不同的轨迹规划方法,包括五次多项式轨迹tpoly用于单维平滑插值,lspb实现速度变化的混合曲线轨迹,mtraj用于二维多维插值,以及mstraj用于构建多段多维轨迹。这些方法考虑了速度限制、插值间隔和加速时间等因素,适用于机器人运动规划。
五次多项式轨迹tpoly:
t=linspace(0,2,51);在0-2秒内进行51次插值
[P,dP,ddP]=Tploy(0,3,t);位置,速度,加速度
[P,dP,ddP]=Tploy(0,3,t,0.02,0.01);0-3的位置之内进行51次插值,后两个是最大最小速度
混合曲线轨迹lspb:
t=linspace(0,2,51);
[P,dP,ddP]=lspb(0,3,t);速度有一段匀速
[P,dP,ddP]=Tploy(0,3,t,0.1);最大速度指定
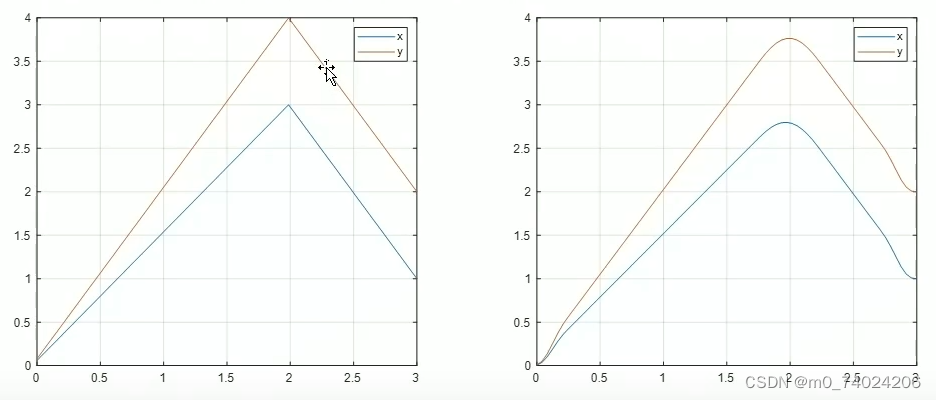
多维轨迹mtraj:二维
t=linspace(0,2,51);
[P,dP,ddP]=mtraj(@tpoly,[0,0],[3,4],t);五次多项式插值方法进行多维轨迹
多维多段轨迹mstraj:![]()
TRAJ = mstraj(WP,QDMAX,TSEG,Q0,DT,TACC,OPTIONS);
(经过的路径,最大速度,每段时间间隔,初始位置,插值间隔,加速时间,)
(这两个只能设置一个)(初始位置为空即0,0)
wp=[0,0;3,4;1,2];
P1=mstraj(wp,[ ],[2,1],[ ],0.04,0);
P2= mstraj(wp,[ ],[2,1],[ ],0.04,0.5);
tranl:位置给到矩阵
tr2rpy:将三位的旋转矩阵转换成横滚、俯仰、航偏角。
即 [r,p,y] = tr2rpy(T);%T是3*3的矩阵
输入是旋转变换矩阵T,输出参数是欧拉角的roll,pitch和yaw,即1*3的矩阵。三个角度是弧度制

















 3512
3512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









