






1. IMU内置与外置
1.1 坐标系转换
R3live主要适配的是livox激光雷达,并且使用的是该激光雷达的内置IMU,因此当使用其他不带内置IMU的激光雷达时,需要将IMU坐标系转换至雷达坐标系下再运行R3live。
方法1:imu_pipeline功能包集:https://github.com/ros-perception/imu_pipeline
修改该功能包中的启动文件ned_to_enu.launch:
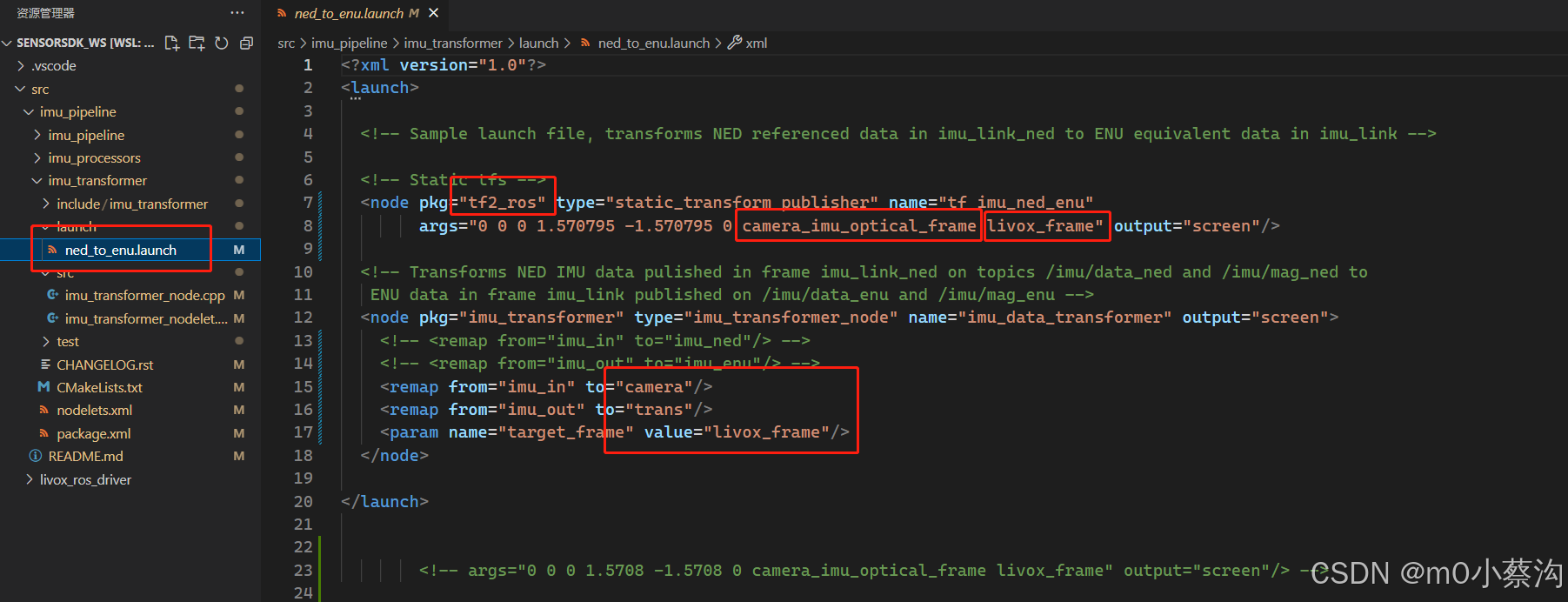
这里有个疑问,节点是同时运行的,如何保证R3live接受到的数据是经过转换过后的呢?
方法2:直接在R3live的r3live_bag.launch中添加下面这句,也可以直接转换坐标系
<node pkg="tf" type="static_transform_publisher" name="imu_to_lidar" args="-0.005, -0.037, 0.078 0 0 0 /limu_link /velodyne 100" />
参考链接:https://blog.csdn.net/m0_49929125/article/details/124535341
https://blog.csdn.net/weixin_40599145/article/details/128064323
1.2 坐标系转换查看验证:
首先检查是否有安装tf2相关工具包,如果没有则安装:
sudo apt-get install ros-noetic-turtle-tf2 ros-noetic-tf2-tools
sudo apt-get install ros-melodic-tf2-sensor-msgs方法1:rosbag play过程中查看坐标系frame_id:
rostopic echo /points_raw | grep frame_id需先rosbag info 获取数据集话题名称points_raw
slam运行过程中查看验证坐标系转换:
rostopic echo /tf 方法2: 使用
find /opt/ros/ -name tf2_echo查找完整路径 ----找不到该路径,因此下面这个命令不可用
rosrun /opt/ros/.../tf2_ros tf2_echo /livox_frame /camera_init
rosrun tf2_ros tf2_echo [source_frame] [target_frame]使用这个命令再尝试一次
rosrun tf tf_echo /livox_frame /camera_init这个可以用
方法3:
rosrun tf2_tools view_frames.py --> rosrun tf view_frames.py前面的可以用,会生成一个PDF文件
后面这个有报错,需要view_frames.py修改代码,参考https://blog.csdn.net/m0_62388326/article/details/135350277
2. 禾赛激光雷达适配
2.1代码修改
首先需要在Lidar_front_end.cpp中添加根据禾赛激光点云数据格式的PCL点:
namespace hesai_ros {
// hesai lidar的点云格式
struct EIGEN_ALIGN16 HesaiPointXYZIRT
{
PCL_ADD_POINT4D;
float intensity;
//PCL_ADD_INTENSITY;
double timestamp;
uint16_t ring;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
} ;
}
POINT_CLOUD_REGISTER_POINT_STRUCT(hesai_ros::HesaiPointXYZIRT,
(float, x, x)
(float, y, y)
(float, z, z)
(float, intensity, intensity)
(double, timestamp, timestamp)
(uint16_t, ring, ring)
)以及hesai_handle():
void hesaiPandar_handler(const sensor_msgs::PointCloud2::ConstPtr &msg)
{
pcl::PointCloud< PointType > pl_full, pl_corn, pl_surf;
vector< pcl::PointCloud< PointType > > pl_buff( N_SCANS );
vector< vector< orgtype > > typess( N_SCANS );
pl_surf.clear();
pl_corn.clear();
pl_full.clear();
pcl::PointCloud<hesai_ros::HesaiPointXYZIRT> pl_orig;
pcl::fromROSMsg(*msg, pl_orig);
int plsize = pl_orig.points.size();
pl_surf.reserve(plsize);
pl_corn.reserve(plsize);
pl_full.reserve(plsize);
/*** These variables only works when no point timestamps given ***/
double omega_l = 0.361 * SCAN_RATE; // scan angular velocity
std::vector<bool> is_first(N_SCANS,true);
std::vector<double> yaw_fp(N_SCANS, 0.0); // yaw of first scan point
std::vector<float> yaw_last(N_SCANS, 0.0); // yaw of last scan point
std::vector<float> time_last(N_SCANS, 0.0); // last offset time
/*****************************************************************/
if(feature_enabled)
{
for (int i = 0; i < N_SCANS; i++)
{
pl_buff[i].clear();
pl_buff[i].reserve(plsize);
}
//计算时间、转换点云格式为PointType,正序遍历
for (int i = 0; i < plsize; i++)
{
PointType added_pt;
added_pt.normal_x = 0;
added_pt.normal_y = 0;
added_pt.normal_z = 0;
int layer = pl_orig.points[i].ring;
if (layer >= N_SCANS) continue;
added_pt.x = pl_orig.points[i].x;
added_pt.y = pl_orig.points[i].y;
added_pt.z = pl_orig.points[i].z;
added_pt.intensity = pl_orig.points[i].intensity;
added_pt.curvature = (pl_orig.points[i].timestamp - msg->header.stamp.toSec()) * 1000; //s to ms
pl_buff[layer].points.push_back(added_pt);
}
for (int j = 0; j < N_SCANS; j++)
{
pcl::PointCloud< PointType > &pl = pl_buff[j];
int linesize = pl.size();
vector<orgtype> &types = typess[j]; //用于记录当前扫描线上每个点的参数
types.clear();
types.resize(linesize);
linesize--;
for (uint i = 0; i < linesize; i++)
{
PointType added_pt;
types[i].range = sqrt(pl[i].x * pl[i].x + pl[i].y * pl[i].y);
vx = pl[i].x - pl[i + 1].x;
vy = pl[i].y - pl[i + 1].y;
vz = pl[i].z - pl[i + 1].z;
types[i].dista = vx * vx + vy * vy + vz * vz;
}
types[linesize].range = sqrt(pl[linesize].x * pl[linesize].x + pl[linesize].y * pl[linesize].y);
//give_feature(pl, types);
give_feature( pl, types, pl_corn, pl_surf );
}
}
else
{
for (int i = 0; i < plsize; i++)
{
if (i % point_filter_num != 0) continue;
double range = pl_orig.points[i].x * pl_orig.points[i].x + pl_orig.points[i].y * pl_orig.points[i].y + pl_orig.points[i].z * pl_orig.points[i].z;
if (range < (blind * blind)) continue;
PointType added_pt;
// cout<<"!!!!!!"<<i<<" "<<plsize<<endl;
added_pt.normal_x = 0;
added_pt.normal_y = 0;
added_pt.normal_z = 0;
added_pt.x = pl_orig.points[i].x;
added_pt.y = pl_orig.points[i].y;
added_pt.z = pl_orig.points[i].z;
added_pt.intensity = pl_orig.points[i].intensity;
// added_pt.curvature = pl_orig.points[i].time / 1000.0; // curvature unit: ms
added_pt.curvature = (pl_orig.points[i].timestamp - msg->header.stamp.toSec()) * 1000; //s to ms
pl_full.points.push_back(added_pt);
}
}
}
2.2可能的报错
添加完尝试运行,可能会有报错:
Get pointcloud data from ros messages fail!!! Input pointcloud field names: [6]: x, y, z, intensity, ring, time,这个报错的原因是r3live_lio.cpp中的get_pointcloud_data_from_ros_message()函数中需要添加针对velodyne/hesai或其他激光雷达数据的处理方式。
修改r3live_config.yaml文件,添加r3live_bag_velodyne.launch文件
修改完后运行,发现无法保存点云地图,点云也没有着色,且没有图像数据
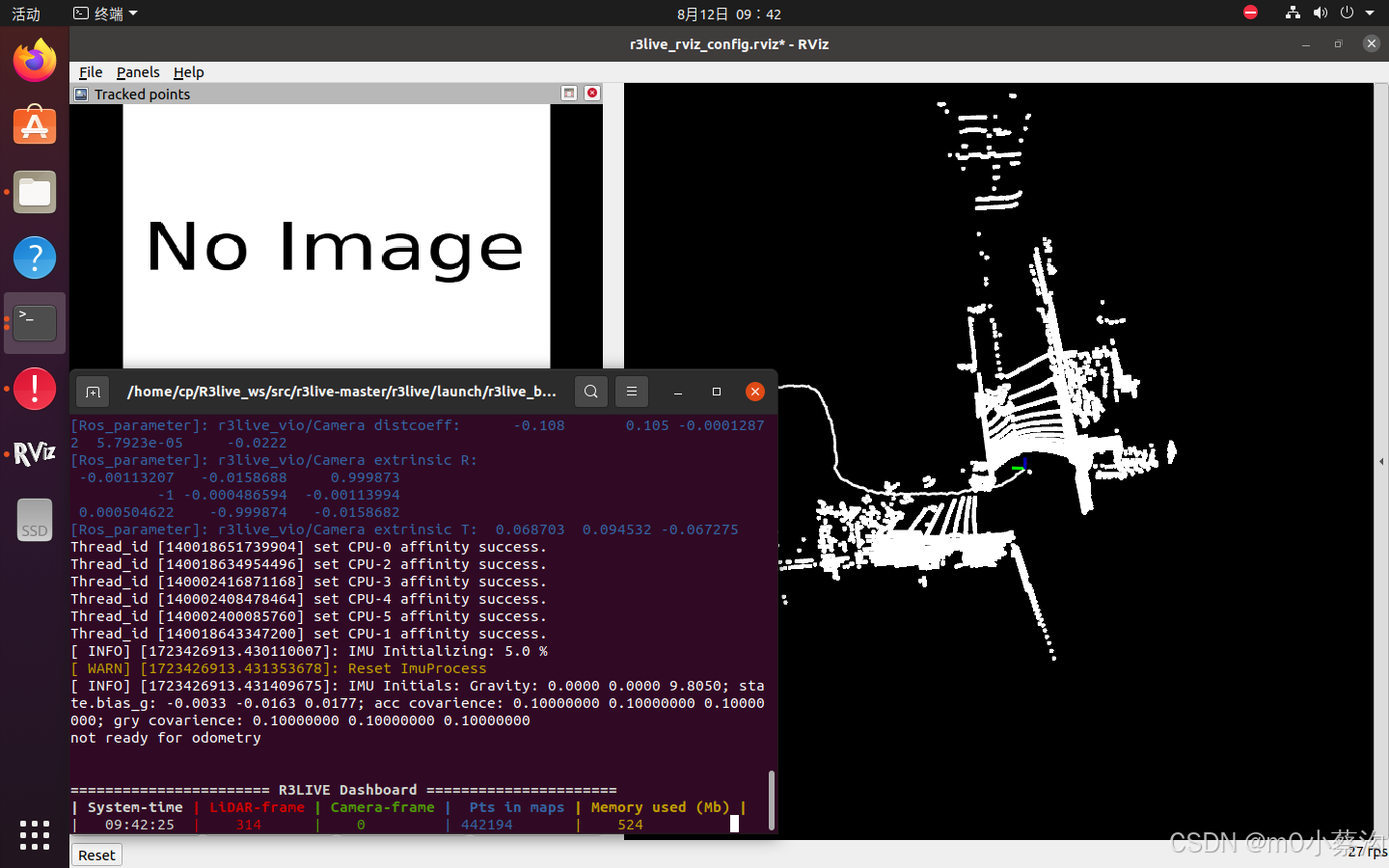
原因是.launch文件中的image_topic有问题,数据集中的是压缩图像,topic为/camera/image_color/compressed,
但r3live.hpp(line334)会自动给图像topic添加"/compressed",因此删掉.launch中topic的"/compressed"即可正常运行。
由此可知,R3live虽然提供了针对原图像和压缩图像两种处理方式,但实际上还是全部当作压缩图像处理的,这样可以降低资源占用。可在r3live.hpp(line334)中对代码作修改,使其可以根据需要处理图像。
代码修改如下:
get_ros_parameter<std::string>(m_ros_node_handle, "/LiDAR_pointcloud_topic", LiDAR_pointcloud_topic, std::string("/laser_cloud_flat") );
get_ros_parameter<std::string>(m_ros_node_handle, "/IMU_topic", IMU_topic, std::string("/livox/imu") );
get_ros_parameter<std::string>(m_ros_node_handle, "/Image_topic", IMAGE_topic, std::string("/camera/image_color") );
//IMAGE_topic_compressed = std::string(IMAGE_topic).append("/compressed");
if(IMAGE_topic.find("/compressed")==std::string::npos)//如果不是压缩图像
{
cout << "Image topic: " << IMAGE_topic << endl;
cout << "Image compressed topic: nan" << endl;
sub_img = m_ros_node_handle.subscribe(IMAGE_topic.c_str(), 1000000, &R3LIVE::image_callback, this, ros::TransportHints().tcpNoDelay());
}
else
{
IMAGE_topic_compressed = IMAGE_topic;
cout << "Image topic: nan" << endl;
cout << "Image compressed topic: " << IMAGE_topic_compressed << endl;
sub_img_comp = m_ros_node_handle.subscribe(IMAGE_topic_compressed.c_str(), 1000000, &R3LIVE::image_comp_callback, this, ros::TransportHints().tcpNoDelay());
}
if(1)
{
scope_color(ANSI_COLOR_BLUE_BOLD);
cout << "======= Summary of subscribed topics =======" << endl;
cout << "LiDAR pointcloud topic: " << LiDAR_pointcloud_topic << endl;
cout << "IMU topic: " << IMU_topic << endl;
//cout << "Image topic: " << IMAGE_topic << endl;
//cout << "Image compressed topic: " << IMAGE_topic_compressed << endl;
cout << "======= -End- =======" << endl;
std::this_thread::sleep_for(std::chrono::milliseconds(1));
}
sub_imu = m_ros_node_handle.subscribe(IMU_topic.c_str(), 2000000, &R3LIVE::imu_cbk, this, ros::TransportHints().tcpNoDelay());
sub_pcl = m_ros_node_handle.subscribe(LiDAR_pointcloud_topic.c_str(), 2000000, &R3LIVE::feat_points_cbk, this, ros::TransportHints().tcpNoDelay());
//sub_img = m_ros_node_handle.subscribe(IMAGE_topic.c_str(), 1000000, &R3LIVE::image_callback, this, ros::TransportHints().tcpNoDelay());
//sub_img_comp = m_ros_node_handle.subscribe(IMAGE_topic_compressed.c_str(), 1000000, &R3LIVE::image_comp_callback, this, ros::TransportHints().tcpNoDelay());


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









