






谈谈转向不足和转向过度(上集:动力学角度分析)
https://www.dongchedi.com/article/6756204716998263304
头条和问答上太多有关“转向不足”和“转向过度”的帖子了,但是要么是基本概念叙述不清,要么直接解读是错的!作为一个汽车专业的科普爱好者,这次决定认真和大家谈谈这个问题。本文分为上下两篇,上篇从汽车动力学角度加以分析,下篇从转向的几何模型来分析,殊途同归,希望各位可以从本篇文章中,更全面的了解”转向特性“。
被滥用的“过度转向”和“不足转向”
我们知道,欧姆定律只是提供了电阻的一个测量方法,电阻大小并非由流过电阻的电流和电压所决定,而是取决于自身的材料性质。其实,“转向不足”和“转向过度”这两个概念,其实从定义上来说与驱动形式也没有必然联系,而是由车辆本身结构和设计决定的。也就是说:后驱也能转向不足(事实上大多数车都是刻意设计成这样,否则驾驶起来很危险),前驱车同样也能转向过度!
为了说清楚这个问题,需要从最基本的转向特性定义谈起。注意,过度转向也叫过多转向,后面不再做区分。
讨论的前提:稳态转向
在《汽车理论》中,所谓的不足转向(US: Under Steer)和过多转向(OS: Over Steer)是在稳态转向的情况下定义的。所谓稳态转向,就是描述汽车转向运动的状态参数不随时间变化,具体说来就是质心侧偏角和质心横摆角速度这两个参数保持恒定(如下图)。
· 质心侧偏角 :车辆质心的速度与车辆纵轴线之间的夹角
· 质心横摆角速度 :当你坐在车上的时候注意观察后视镜,当你转弯的时候,其实你发现自己正在旋转,这个旋转的角速度就叫做横摆角速度,也叫横摆率
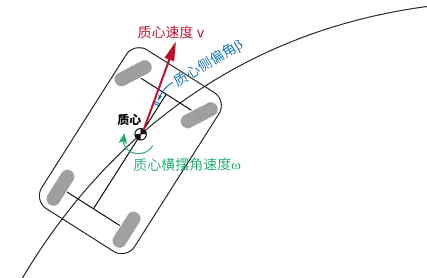 质心侧偏角与横摆角速度
质心侧偏角与横摆角速度
反映到具体的驾驶操作上,就是车速的大小不变,方向盘转角也保持不变,于是车辆就保持一个匀速圆周运动。
如果你还不是很理解横摆角速度的含义,请看下图这个例子,图中车辆在圆周运动的过程中,其实同时参与了两个运动,一个是绕圆心的平动,另一个是绕质心的转动,那么在一定时间内,车辆沿圆周运动的角度,与车辆绕质心的转动角度是相等的!因此,两者角速度也就相等!你也就可以说,在圆周运动中,车辆的横摆角速度就是绕圆心运动的角速度,它其实反映了车辆绕行圆周的快慢!它越大,说明车辆转弯越剧烈。

车辆的稳态转向(匀速圆周运动)示意图
稳态转向时车辆受力分析
我们本期内容是在动力学框架下讨论问题,因此核心就是分析车辆在稳态转向工况下的受力情况,因为只有物体的受力决定了物体的运动!这是牛顿老爵爷告诉我们的!那么说到受力,其实就是列写两个方程:受力平衡方程和力矩平衡方程。
a) 受力平衡
很显然,汽车在稳态转向情况下,是在做一个匀速圆周运动,假设半径为,则所需向心力为:

那么接下来的问题自然就是:这个向心力是谁提供的?答案嘛,就是我一直反复念叨的那句话:汽车与地面唯一接触的部分就是轮胎,因此汽车实现运动所需要的力,最终只能通过地面对轮胎的反作用力来实现。
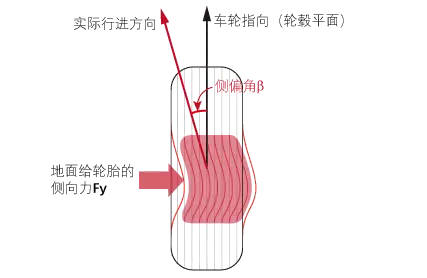
轮胎在侧向力下发生的侧偏现象
我们知道,滚动的轮胎若受到来自地面侧向力,就会产生一种侧偏现象,即轮胎实际行进方向与轮毂平面会有一个夹角,这个夹角称为侧偏角(Side Slip Angle),且侧向力的大小与侧偏角成正比(在小侧偏角前提下):
![]()
因此,车辆做圆周运动所需要的向心力,显然是由地面对发生侧偏的前后车轮而产生的侧向力来提供的!
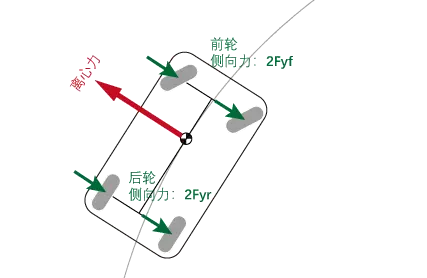
稳态转向运动中车辆的受力平衡
所以我们可以得到第一个受力平衡方程(为什么平衡?因为现在是稳态啊):
![]()
b) 力矩平衡
刚刚是把车辆当作一个质点来考虑,但是车辆毕竟不是一个点啊,它是有大小的一个刚体。对待刚体,除了受力平衡之外,还必须考虑力矩平衡问题!对上面那张图略加改造可得:
稳态转向运动中的力矩平衡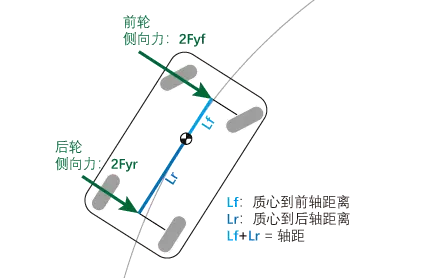
地面对前后轮施加的这两个侧向力,除了提供向心力之外,还对车辆质心产生了两个力矩。同理,由于车辆处于稳态,这两个力矩相互平衡抵消,否则就会使车辆横摆角速度发生变化,也就不叫稳态转向了!
![]()
上述受力平衡和力矩平衡两个方程,就是我们描述车辆稳态转向的最重要也是最根本的两个方程式。
继续处理两个方程
别忘了,我们的初衷是要定义如“转向不足”和“转向过度”之类的特性,那么我们的任务就应该是找到描述稳态转向运动的参数(比如圆周运动半径、横摆角速度等)与我们驾驶员的操作(方向盘转角、车速)之间的关系。
为了找到这个关系式,我们需要把上面的两个平衡方程,以及轮胎的侧偏角正比于侧偏力这个基本事实综合考虑。用质心侧偏角来表示前后轮侧偏角,然后再用前后轮侧偏角求得前后轮侧偏力,将其代入到前面的两个基本方程中,就可以得出联系车辆状态参数与驾驶员操作的关系式:

我们先看改写后的方程中,哪些是已知的,哪些是未知的。首先Kf, Kr是前后轮胎的侧偏刚度,Lf和Lr分别是质心到前后轴的距离,显然这都是车辆本身的参数。而m是车身质量,L是轴距(L=Lf+Lr),这些都可以当作已知参量。那么这组方程其实就是在告诉我们:描述车辆稳态转向运动的两个参数,质心侧偏角和横摆率,随方向盘转角和车速是如何变化的!
这部分推导涉及稍微复杂的转向几何关系以及刚体运动学,想知道详细原理,请关注我即将推出的“汽车动力学漫谈”专栏中的系列文章,或者直接关注后私信我,或者查阅汽车动力学相关章节。本文着重谈关键结论,所以这部分的推导从略。
剩下真就是体力活了,我们把它解出来,看看到底是啥规律呢?
稳态转向特性登场
解出魂牵梦绕的两个参数:
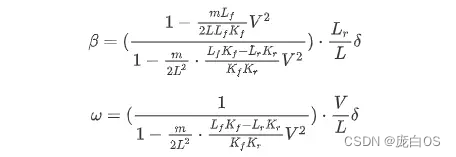 质心侧偏角和横摆角速度与车速和方向盘转角(前轮转角)
质心侧偏角和横摆角速度与车速和方向盘转角(前轮转角)
为了后面讨论方便,我们顺手把圆周运动的半径表达式也写出来:

有意思的地方来了:我们发现里面有一个(其实是一坨)共同的因子,定义:

我们称A为“稳定性因子”,也叫作“不足/过多转向梯度”。到此为止,大BOSS终于登场了!就是A,决定了汽车到底是不足转向还是过多转向特性的。而且仔细观察一下,它的表达式中只涉及了车辆本身的参数,而并没有看到直接与前驱或后驱等驱动形式相关的因素。这就是我开始说的,转向特性本身和什么驱动形式并无直接关系。如果:
- A > 0,称为转向不足:Under Steer
- A < 0,称为转向过度:Over Steer
- A = 0,称为中性转向:Neutral Steer
还是一头雾水?别急,下面咱们来仔细探讨一下转向不足和转向过度在具体的驾驶中意味着什么?
转向特性的实际意义
简便起见,我们直接用A来替换前面公式中的因子,并采用圆周运动半径的表达式来分析不同转向特性的意义,因为这个解释起来更直观一些。

a)固定方向盘转角(前轮转角)
先看描述定圆回转运动的圆周半径R的表达式。显然它的表达式可以分为两个部分,第一个与速度和稳定性因子有关;第二部分,轴距与方向盘转角之比,显然轴距是不会变的,而在稳态转向前提下,这个转角也是固定不变的,于是我们按照刚才对A的取值的划分,分别讨论车辆的转向特性。先看:
- 当A = 0的时候,半径只取决于轴距与方向盘转角之比,与车速完全无关,换句话说,如果你驾驶的是一辆中性转向的汽车,只要你方向盘转角保持不变,不论车速快还是慢,运动半径永远是保持不变的!
- 当A > 0的时候,随着车速增加,(1+AV^2) 这一项也随之增加,因此总的运动半径也就随之增加,换句话说,如果你驾驶的是一辆具有不足转向特性(US)的车辆,即使你的方向盘转角保持不变,当你加速的时候,车辆会向圆周的外侧冲出去;
- 当A < 0的时候,随着车速增加,(1+AV^2) 这一项是减小的,因此车辆的运行半径也会随着车速增加而减小,也就是说,当你驾驶一辆具有转向不足特性(OS)的车做圆周运动,虽然方向盘转角不动,但当你加速的时候,车辆会向着圆周内侧偏转!
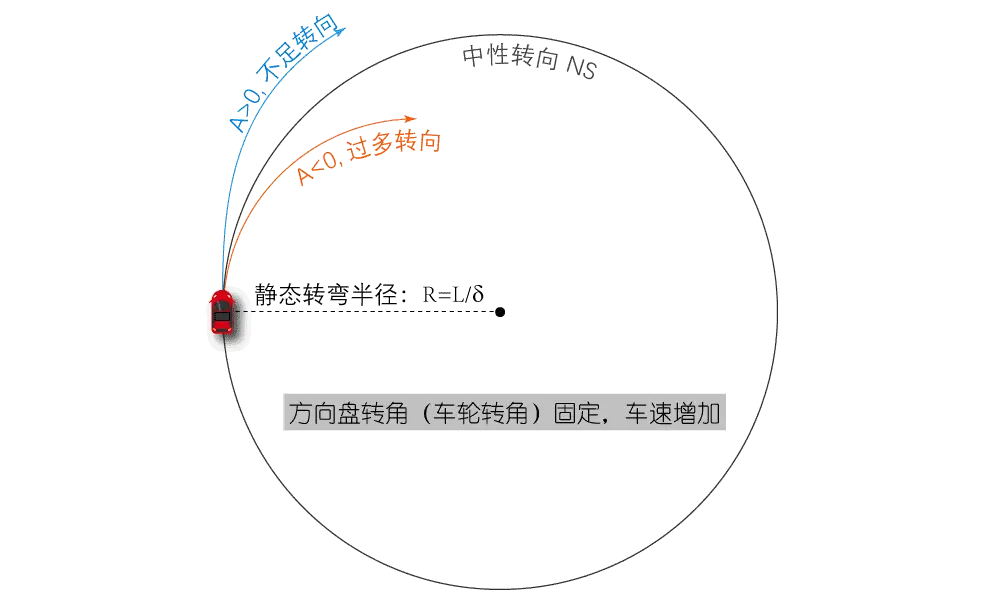 这就是我们常见到的图了,相信大家都很容易看懂!
这就是我们常见到的图了,相信大家都很容易看懂!
b)固定圆周半径时
接着我们讨论一下,如果非要让车辆圆周运动的半径保持不变,即我不管车是什么特性,就非要在加速的同时,车辆还能够沿着固定半径行驶,该做什么操作呢?不需要公式我们也能凭直觉做出正确反应:
- 当A = 0的时候,半径只取决于轴距与方向盘转角之比,与车速完全无关,所以你不需要做任何操作;
- 当A > 0的时候,随着车速增加,你的车向圈外甩去,因此你当然需要加大方向盘转角(多往右拧方向盘)才能让车回到原先的圆周上去;
- 当A < 0的时候,随着车速增加,车辆会向着圆周内侧偏转,这时候你就要往反方向打方向盘了,俗称“回轮”对吧,只有这样,你的车才能回到原先的圆周。
上述结论,也可以通过把刚才的半径表达式中左边的R和右边的方向盘转角互换位置来分析得到。
为什么说转向过多是危险的
刚刚我们只盯着圆周半径,已经说明了不同转向特性的车,到底有什么区别。现在,我们再深入一步,再回头看看描述横摆角速度的表达式:

它含有A的项在分母的位置上,马上就会反应到,分母为0怎么办?显然,这时候的横摆角速度变得无限大!也就是说,车在不停的高速旋转,你可能早就休克了…… 当然是很危险的情况了。那它什么情况下才有可能为0呢?只有在A<0的前提下才可能,也就是说,这种危险的情况是具有过多转向特性的车辆专属的。在分母为0时,换算成车速就是:

这个车速叫做临界车速。对于一辆具有OS特性的车,转弯时达到这个速度就意味着失控。临界车速下再看看运动半径R,显然是零!所以我们可以从脑子里还原一下这个过程,当你驾车沿着图中虚线所示的圆周行驶,车速和方向盘转角都不变,然后你觉得这个绕圈太慢了不过瘾,想快一些,于是就踩下油门想加速,但是你惊奇的发现,虽然我方向盘没动,但是随着速度越来越快,你的车越来越往内圈跑去,而且绕圈的半径不断减小,同时你在车里感觉到车体的旋转越来越剧烈了,你和车就像卷进了一个漩涡一样,最后在达到临界车速的时候,你的车已经以无穷大的速度在原地转圈了!
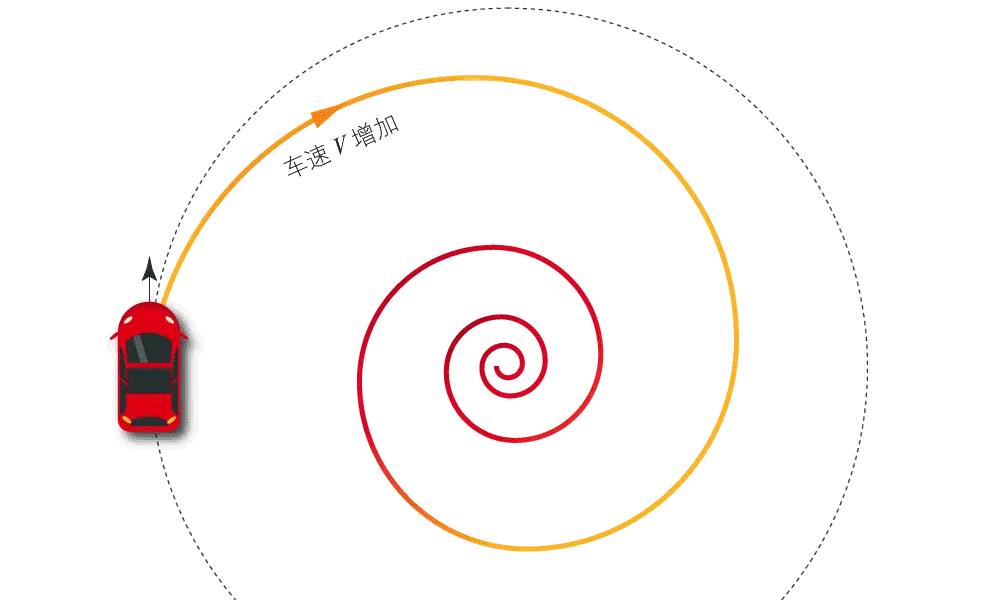
临界车速的危险工况示意图
这当然是个理想情况的模拟,实际早在你达到临界车速之前,就因为过大的离心力而翻车了。相信你也不会等到万劫不复的时候才想起来往回打方向盘。但是从上面的分析中我们可以清楚的看到,过度转向特性是一种危险的情况。
同样的方法来分析出具有不足转向特性的车辆:在速度不断增加的时候,运动半径会越来越大,横摆角速度会越来越小,这虽然说不上多好,但至少肯定不会有刚才这种翻车的危险,如果我们想继续沿着原来的路径走,只需要不断加大方向盘转角即可。
由此可知,一辆车是什么转向特性,完全取决于这个神秘的“稳定性因子A”,而这个A是由车辆本身的参数完全决定的!换句话说,一辆车是否表现出过多转向的特性,是可以通过调整A的取值来控制的!
实际上,所有的车型,不论是前驱后驱,它们在设计的时候,都考虑到了这点,并会选择合适的参数,让车辆在常规的驾驶操作中都表现出转向不足的特性,以增强驾驶安全性。
转向特性与驱动形式的联系
目前为止,本文向大家传达理念就是:车辆的稳态转向特性是车辆本身参数决定的,而不是由驱动形式决定的!但这可并不是说,驱动形式完全无法影响车辆的转向特性哦!网上经常提到的什么前驱转向不足,后驱转向过度到底有没有它的道理呢?
为了回答这个问题,我们需要再次明确一下稳定性因子A里面都包括什么,车辆质量m,轴距L,质心距前后轴的距离Lf和Lr,还有就是前后轴的侧偏刚度Kf和Kr。其中质量和轴距两个参数,只要车造好了就都不会变。而质心的位置,一辆车出厂时虽然是固定的,但是会因为坐的乘客位置不同发生一些变化,而且在实际行驶过程中也会随着车辆载荷的转移而时刻发生变化,因此这两个距离Lf和Lr也会随之发生改变;再看侧偏刚度,如果不考虑悬架因素,这两个参数就是前后轮胎的侧偏刚度,但是由于实际车辆都是有悬架的,因此实车上都是统称为前后轴的侧偏刚度,而不是前后轮侧偏刚度,这其实就包含了轮胎和悬架两者的综合影响。这两个刚度值,同样也会随着运动中前后轴上载荷动态变化而变化。
也就是说,车辆的转向特性不是一成不变的,而是随着这些参数变化而改变的,这正是与驱动形式建立联系的桥梁!如果不同的驱动形式,能够让车辆的这些参数发生改变,那么不就相当于改变了车辆的转向特性吗?沿着这个思路,我们分别来看看前驱、后驱能变换出什么花样。
简化分析
下面我就采用“稳态转向”这个极为简化的假设,来分析一下驱动形式如何影响转向特性。要说明的是,完整的分析需要借助更复杂的稳定性因子,即所谓“扩展稳定性因子”的概念,其中除了包含咱们之前在稳态转向假设下推导出的A因子,还需要考虑纵向加速度、载荷转移、侧倾转向以及侧倾对悬架系统的影响因素等等,是一个非常复杂的表达式,严格来说,只有用这个扩展稳定性因子才能得到比较严谨的分析结论,但这里为了凸显问题实质,做一个简化,仅用A来阐明问题。而对扩展因子的讨论放在极简分析之后。下面我们来明确我们的讨论假设:
- 忽略悬架系统影响,则此时的前后轴侧偏刚度Kf和Kr,就是前后轮胎的侧偏刚度
- 前后轮完全相同,即其侧偏刚度特性亦完全相同
- 前后轮轮胎压力相同,因为充气压力也是影响侧偏刚度的一个因素
再次提醒,我们分析的关键,就是A的取值与零的关系,大于零意味着不足转向,小于零意味着过多转向,我们下面只要分析不同驱动形式的车辆,在日常转弯操作中,是否让A有着大于零或小于零变化的可能,我们分别来看:
a)后驱车
一般FR车型都喜欢宣传自己的前后轴载荷分配均衡,那我们干脆假设有一辆后驱车具有理想的50:50轴荷比,也就是说车辆质心就位于轴距中心。根据刚才的假设2,在静止不动时,LfKf - LrKr = 0
我们假设在加速时,有10%的载荷从前轴转移到了后轴,那么前后轴荷比就变成了40:60,即重心后移了,如果Kf和Kr仍然保持不变,那么此时的LfKf - LrKr > 0,也就意味着A < 0,车辆趋于过多转向特征。

但实际上要复杂一些,因为前后轮的侧偏刚度是和垂直载荷相关的,简单来说是二次抛物线关系,如图所示。不难看出来,静止时,由于前后轴载荷相同,因此前后轮的侧偏刚度完全相同,都是,但是如果车辆加速,载荷就会发生转移,前轴荷降低,后轴荷增加,相应的前后轮对应的侧偏刚度也同样发生变化,如果这个变化正好落在这个抛物线的上升一侧,那么前后轮的侧偏刚度就会产生明显的分离,后轮侧偏刚度Kr会变得稍大于前轮侧偏刚度Kf。但是一般来说,这个变化范围并不会很大,因此前后轮的侧偏刚度也没什么显著差异。

综合Lf、Lr以及Kf、Kr的变化趋势,我们可以看到,车辆加速时,Lf变大(Lr变小),但是Kf变小(Kr变大),那么总的乘积究竟是变大还是变小,则取决于各自的变化程度。而这个变化程度,是随着车辆布局和设计而改变的,一般来说,侧偏刚度的变化程度要小一些,而质心转移的变化程度要更大一些,即总的效果是加速时,后驱车辆仍然表现为LfKf - LrKr > 0,也就是A<0的转向过度特性。
但大家也看到了,后驱车同样可以通过调整侧偏刚度和载荷转移程度而表现出转向不足的特性的。
b)前驱车
经过上面对后驱的分析,我想大家一定能自己搞定前驱的分析。其实我们只要区分出两者的不同点就好了。我认为最关键的不同就是,前驱车的静态载荷分布就不均匀!由于动力总成全部集中于机舱,因此前悬一般都很大,大部分载荷都集中在在前轴附近,显著要大于后轴。一般前驱车满载的时候能做到5:5的前后轴荷比,而空载的时候,6:4或者更悬殊的7:3都是有可能的。
车辆静止时,前驱的LfKf一般都小于LrKr,即便随着加速时载荷后移,也只是缩小了两者之间的差距,很难完成翻转,所以这也就意味着前驱车基本都是处于一种转向不足的特性之下的(A>0)。
更贴近实际车辆的分析
前面的极简分析,过度简化了这个分析模型,试图最简单粗暴的模型来帮助大家理解:虽然转向特性和驱动形式无关,但是驱动形式的确能通过改变转向特性中的某些参数,来达到影响转向特性的目的!所以希望您读到这里的时候,不要见到后驱就一定认为是转向过度,前驱就一定天生转向不足,这都是不恰当的说法。
那么实际车辆中由于悬架、以及前束角、变形转向等因素的影响,转向特性的分析远没有这么理想,因此会有一个扩展稳定性因子来描述。即便如此,在很多时候也只能做定性分析,定量数据无法推导出来,只能通过一些实验才能测得。下图就是一辆汽车在考虑到变形转向和前束变化时,转向半径与纵向加速度之间的关系曲线。
可以看到,在车速很高的情况下,后驱车加速时,转向半径会变小(转向过度),而前驱车加速时,转向半径变大(转向不足),而四驱车,其转向特性受加速或制动的影响非常小!
注意:在不同车速下,上述关系并不总是成立,也就是说,即使是相同驱动形式的车,在不同车速下也可能会表现为不同的转向特性。
写在最后
这一期从动力学角度来向大家解释了转向特性的问题,但前提还是侧偏角比较小的情况下,认为侧向力与侧偏角成正比关系,如果超过这个限度呢?下一期我会从转向的几何关系出发,从另一个角度再次看看汽车的转向特性问题(已更新:认为汽车转弯很简单?来了解下这背后的科学原理吧)。如果你喜欢和汽车有关的话题,请关注我,以及我的 “汽车为什么会跑” 音频科普专栏,谢谢!
参考资料
- “车辆操纵动力学”,第二版,安部正人(日)著,喻凡译,机械工业出版社
- “汽车理论”,第四版,余志生著,清华大学出版社

















 2510
2510

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









