







1、内容简介
略
541-可以交流、咨询、答疑
2、内容说明
在传递率的理论分析研究中,取PID施加的反馈控制力为
式中,为位移反馈增益,对应的即为前一小节PID参数整定计算中的,增益发生变化,对应施加的PID控制力也相应发生变化。
于是,杠杆式隔振系统的动力学方程变为
则主动隔振系统的振动传递率为
取,各项参数为
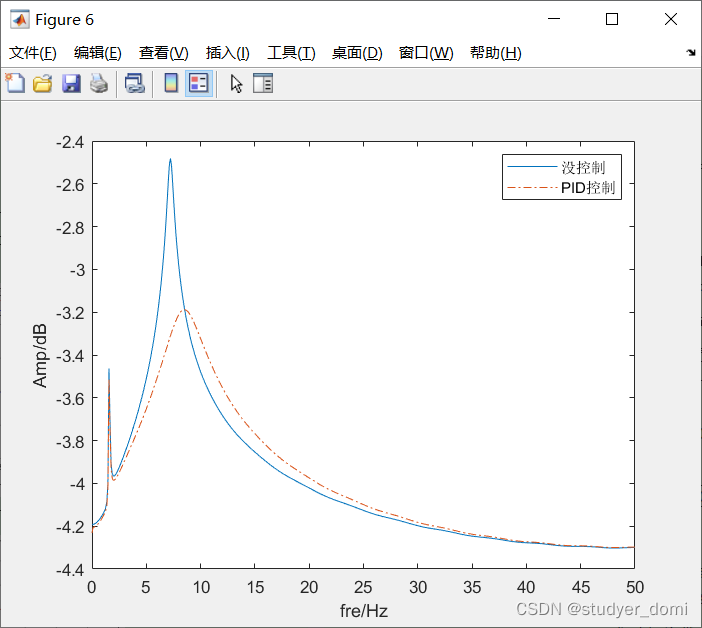
对于不同的位移反馈增益,基于PID的主动隔振系统的传递率我们可以通过Matlab编程画图可得如图X所示,从图中可以看出增大位移反馈增益,实际上相当于增大了系统刚度,因而相当于增大了系统的固有频率,使系统的低频隔振效果显著提高,但是共振区的频率逐渐右移,且共振区的隔振效果甚至可能比未添加控制的隔振效果来得差。
3、仿真分析
close all
clear
clc
fs = 100; % 仿真的求解频率
force_fs = 10; % 输入正弦信号的频率
sim('finalmodel18b.mdl')
noctl_y = noctl.signals.values;
pidctl_y = pidctl.signals.values;
figure
plot(tout,noctl_y)
xlabel time/s
ylabel Amp/m
title 没控制
figure
plot(tout,pidctl_y)
title PID控制
xlabel time/s
ylabel Amp/m
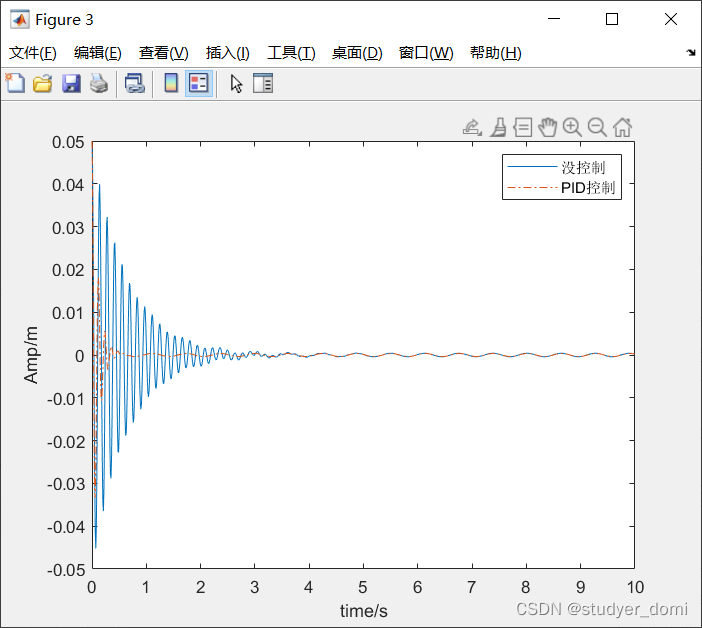
figure
plot(tout,noctl_y,tout,pidctl_y,'-.')
xlabel time/s
ylabel Amp/m
legend('没控制','PID控制')
[noctl_f,noctl_y0]=change_fft(fs,noctl_y);
figure
plot(noctl_f,log10(noctl_y0))
xlabel fre/Hz
ylabel Amp/dB
title 没控制
[pidctl_f,pidctl_y0]=change_fft(fs,pidctl_y);
figure
plot(pidctl_f,log10(pidctl_y0))
xlabel fre/Hz
ylabel Amp/dB
title PID控制
figure
plot(noctl_f,log10(noctl_y0),pidctl_f,log10(pidctl_y0),'-.')
xlabel fre/Hz
ylabel Amp/dB
legend('没控制','PID控制')
% ratio =
4、参考论文
略

















 1453
1453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









