







物体检测与图像去雾
1. 项目概述
随着自动驾驶技术的发展,如何在恶劣天气条件下,尤其是雾霾天气中保证物体检测的准确性,成为了一个亟待解决的问题。本项目旨在结合图像去雾与物体检测技术,探索去雾技术对物体检测性能的提升效果。我们使用了YOLOv8(You Only Look Once)这一先进的目标检测架构,并对比了在不同去雾处理下物体检测的效果。实验中,基于DAWN数据集进行训练和评估,分析了原始图像和去雾图像(应用了CLAHE和暗通道先验去雾技术)在检测精度、召回率和mAP(mean Average Precision)等指标上的表现差异。
本项目的最终目标是为自动驾驶系统提供一个高效、准确的物体检测算法,在雾霾、沙尘、雨雪等不良天气条件下,能够实时、准确地识别交通物体,提升道路安全性,减少交通事故。
2. 项目范围
本项目的主要任务是评估去雾方法在改善物体检测精度方面的有效性。具体应用场景包括:
- 自动驾驶车辆:能够在雾霾天气下准确识别道路标志、行人、其他车辆等对象。
- 监控系统:在恶劣天气(如雾霾、雨雪)中,确保视频监控系统的目标检测能力。
- 遥感影像:对空中或卫星拍摄的图像进行去雾处理,增强图像清晰度,提升地物识别能力。
3. 项目特性
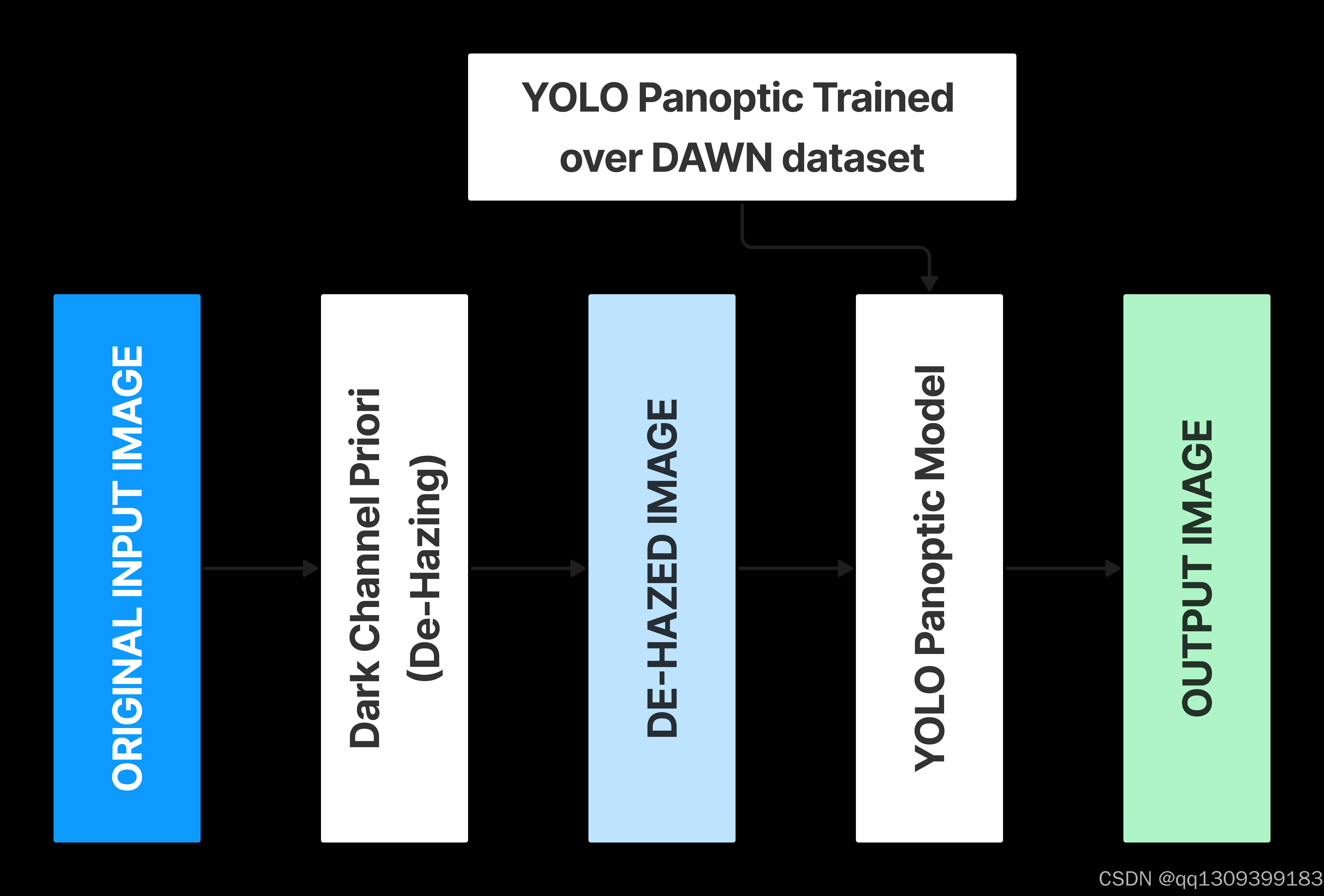
本项目通过构建自动化的处理管道,结合图像去雾技术与物体检测算法,实现以下特性:
- 图像去雾:使用对比度受限自适应直方图均衡化(CLAHE)与暗通道先验(DCP)两种去雾方法对图像进行去雾处理。
- 物体检测:使用YOLOv8进行图像中的物体检测,比较原始图像与去雾图像在物体检测中的表现。
- 性能评估:通过计算精确度(Precision)、召回率(Recall)和mAP,评估去雾技术对物体检测精度的影响。
- 自动化管道:实现从图像预处理、去雾、物体检测到结果分析的自动化流程。
- 结果保存与分析:检测结果和预测结果将保存到特定目录中,便于后续分析与比较。

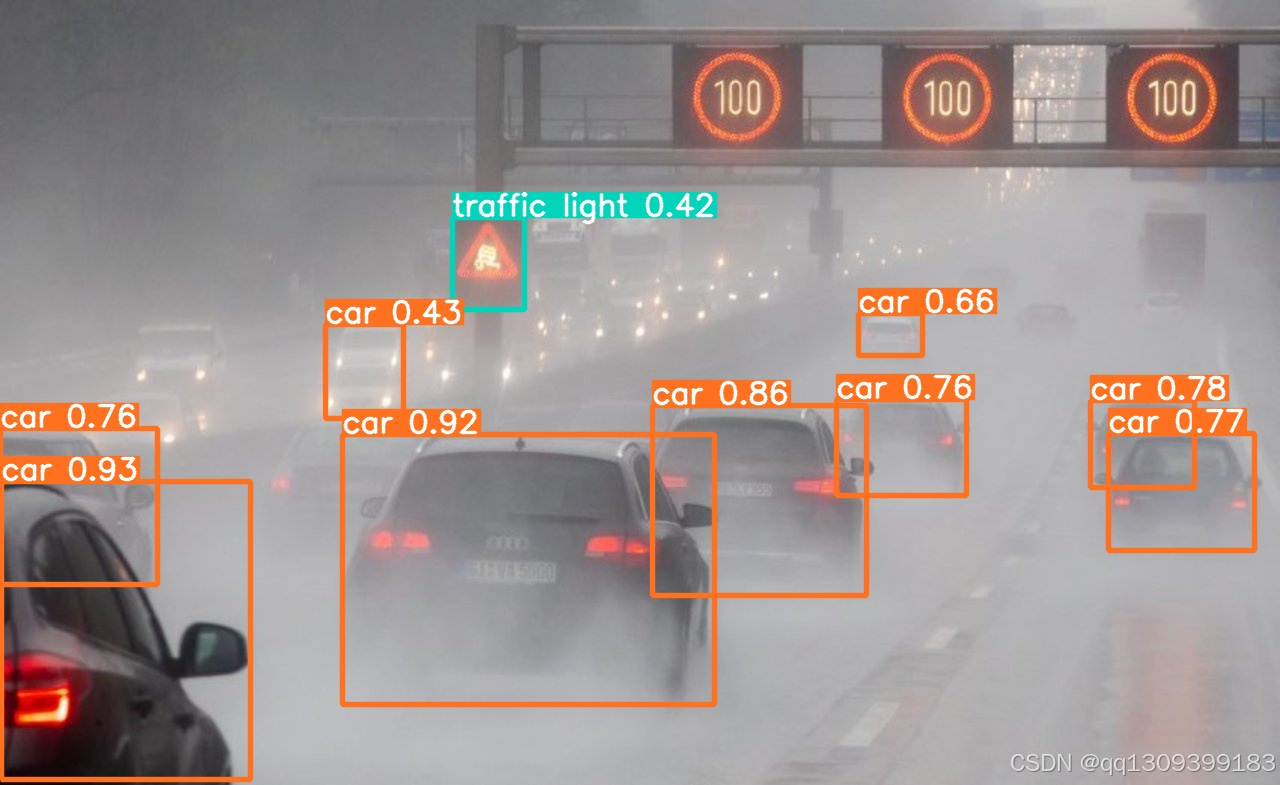
改进前
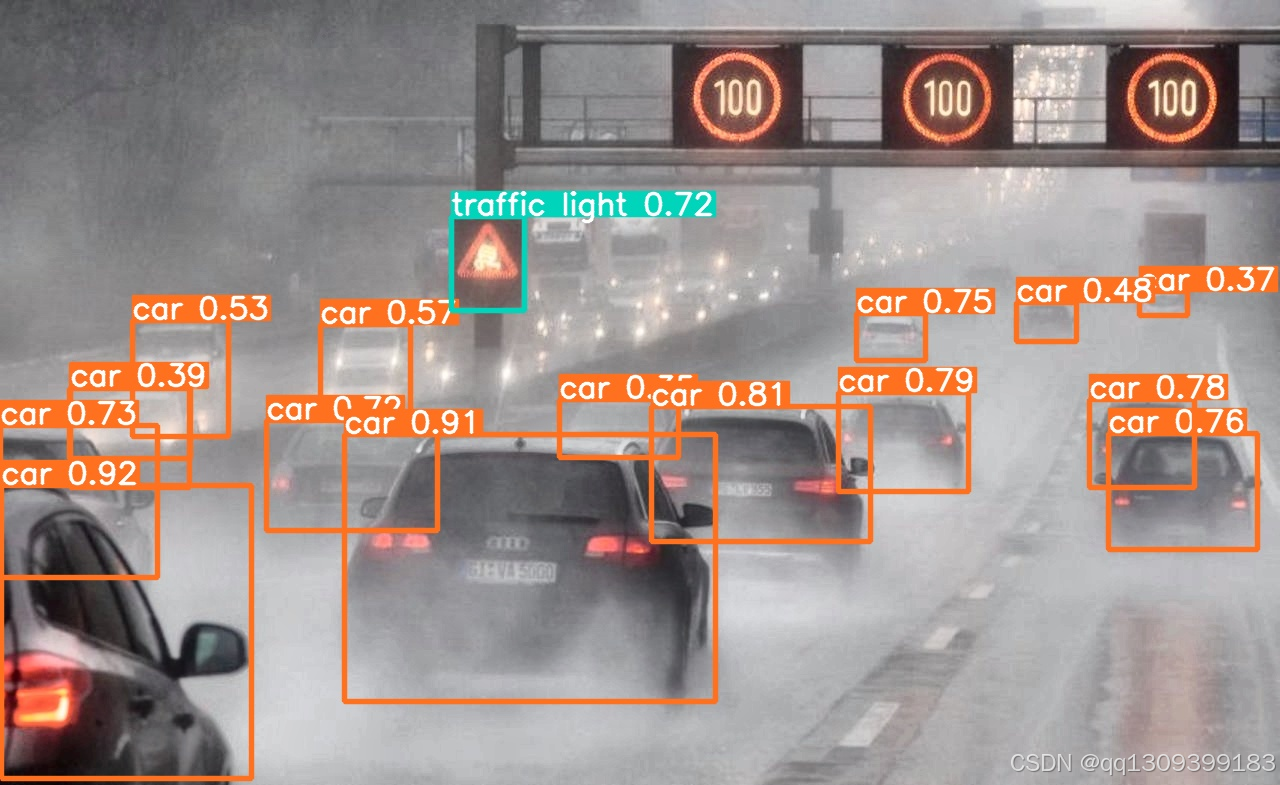 改进后
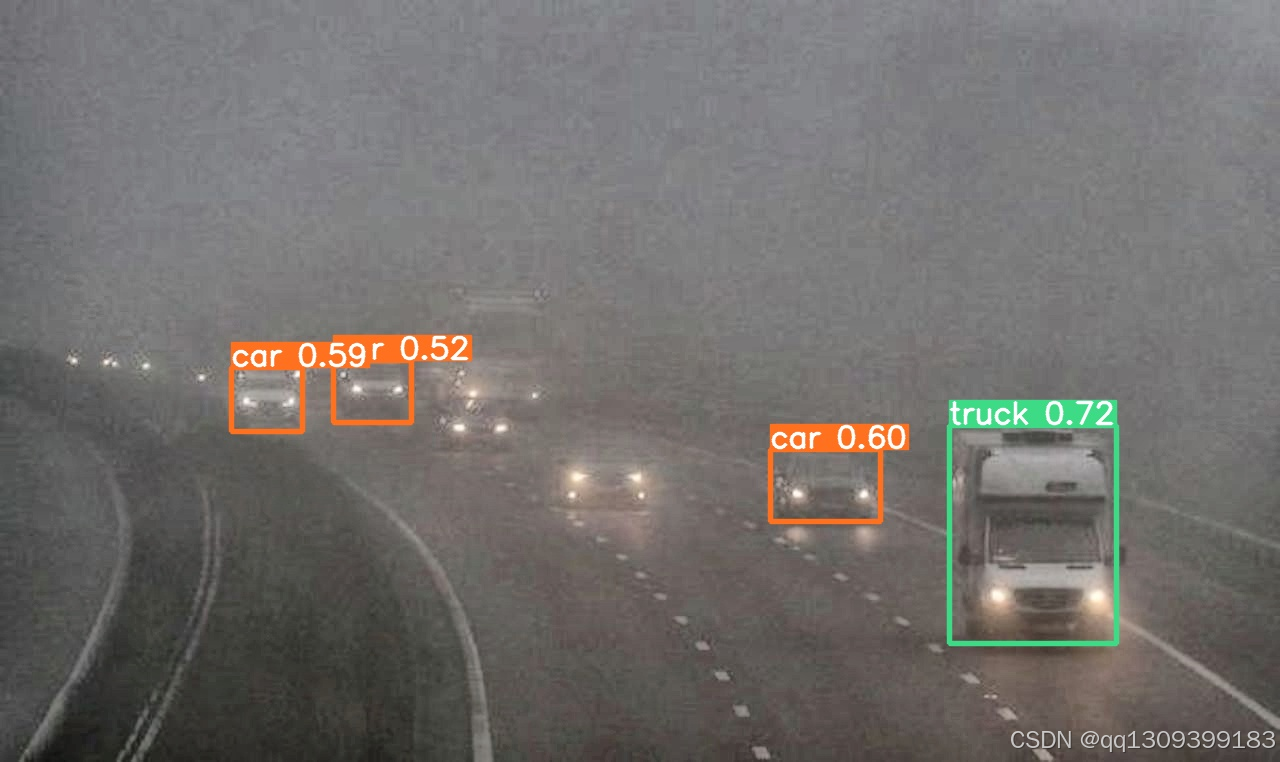
改进后
4. 使用的技术
-
去雾算法:
- CLAHE(对比度受限自适应直方图均衡化):通过增强图像局部区域的对比度,减少雾霾对图像清晰度的影响。
- 暗通道先验(Dark Channel Prior, DCP):通过分析图像中的暗通道信息估计雾霾程度,恢复图像的清晰度。
-
物体检测算法:
- YOLOv8:基于YOLO系列的深度学习目标检测模型,通过卷积神经网络(CNN)直接从图像中预测目标的类别和位置。YOLOv8是YOLO系列的最新版本,相较于前几代,它在速度和准确度上都有了显著提升。
-
性能评估指标:
- Precision(精确度):检测到的正类物体中,有多少是正确的。
- Recall(召回率):所有实际存在的正类物体中,有多少被正确识别。
- mAP(mean Average Precision,平均精度均值):综合考虑精度和召回率,衡量模型整体性能的指标。
-
数据处理和可视化:
- PyTorch:用于训练YOLO模型,并加载预训练权重。
- ultralytics:提供YOLOv5/YOLOv8的集成和推理接口。
- OpenCV:用于图像处理,尤其是去雾过程中的图像操作。
- Matplotlib:用于绘制评估指标的图表,帮助进行结果分析。
5. 安装与使用
-
安装依赖:
pip install -r requirements.txt -
下载YOLOv8模型:
python -m torch.hub download ultralytics/yolov8 -
运行模型:
python main.py -
测试图像需要放置在
data/test/images目录下,并将标注数据放在data/test/ground_truth.json中。运行后,检测结果将保存至results目录,目录结构如下:results/ ├── original/ ├── defogged_clahe/ ├── defogged_dark_channel/ ├── detection_original/ ├── detection_clahe/ ├── detection_dark_channel/

6. 实验结果
从实验中可以看出,使用YOLOv8与去雾技术相结合的模型(如YOLO-DAW)在多个恶劣天气条件下的表现优于传统的YOLOv8模型。以下是部分结果展示:
| 输入图像 | YOLOv8输出 | YOLO-DAW输出 |
|---|---|---|
| 原始图像 | 检测效果较差 | 检测效果良好 |
| CLAHE去雾后 | 检测精度提高 | 检测精度大幅提高 |
| 暗通道去雾后 | 精度有所提升 | 精度更为优秀 |
实验结果表明,在雾霾、沙尘、雨雪等恶劣天气下,YOLO-DAW的检测精度(mAP)显著提升,尤其在物体边界模糊和对比度较低的情况下,去雾后的图像大大改善了YOLO的检测表现。
7. 未来发展方向
- 扩展去雾算法:可以尝试加入更多去雾算法进行对比,如基于深度学习的去雾方法,进一步提升去雾效果。
- 引入更多物体检测模型:除了YOLOv8,还可以尝试其他先进的目标检测模型(如EfficientDet、RetinaNet等),进行性能比较。
- 部署REST API:实现基于Web的远程图像处理,用户可以上传图像并获取去雾与物体检测结果。
- 实时去雾与检测:优化算法,提升处理速度,实现车辆、监控系统等实时应用中的去雾与物体检测。
8. 结论
本研究表明,通过结合图像去雾技术与先进的目标检测算法YOLOv8,可以显著提高在恶劣天气条件下的物体检测精度。无论是在自动驾驶、监控系统,还是遥感图像分析中,该技术都具有广泛的应用前景。通过进一步优化去雾算法和物体检测模型的组合,可以进一步提升在复杂环境中的物体检测能力,为未来智能交通系统和安全监控提供有力的技术支持。


















 5280
5280

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









