







第一章 摄像机几何
一、针孔摄像机和透镜
1. 针孔摄像机的原理
如果将胶片直接放置在物体前方,物体的每一个点都会发散出很多束光线,胶片上的每一个点都会叠加物体不同位置发出的光线,这样没有办法在胶片上清晰地成像。

如果在物体和胶片中间加一块隔板,隔板中间有一个小针孔,这样隔板会滤除大部分对成像产生干扰的光束,最后在胶片上呈现出一个倒立的像。这就是“小孔成像”原理的直观解释。

针孔摄像机就利用了“小孔成像”原理,示意图如下:

其中,f=焦距,o=光圈=针孔=摄像机中心。虚拟相平面与真实像平面对称,内容一样,x, y方向与真实相平面相反。实际处理中默认分析的是虚拟像平面。
随着光圈减小,成像效果越来越清晰,但是图像越来越暗。为了解决这一问题,可以增加透镜,将多条光线聚焦到胶片上,增加照片的亮度。

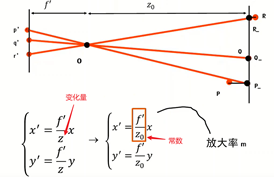
2. 近轴折射模型
在凸透镜成像中,我们只关心透镜和胶片之间的距离\({z}'\),其中\({z}'={{z}_{0}}+f\)。

由上图可以看出,凸透镜成像与小孔成像满足同样的相似关系。因此,凸透镜成像满足以下关系:\[\left\{ \begin{align} & {x}'={z}'\frac{x}{z} \\ & {y}'={z}'\frac{y}{z} \\ \end{align} \right.\]
3. 镜头畸变问题
由于镜头制造工艺不完美,镜头形状存在缺陷,因此相机成像会发生畸变。畸变主要分为径向畸变和切向畸变,这里主要考虑径向畸变。
径向畸变可以分为枕形畸变和桶形畸变。通常情况下,广角镜头容易产生桶形畸变,而长焦镜头则更容易出现枕形畸变。

二、摄像机几何
1. 数学基础
图像点(欧式坐标→齐次坐标):\[(x,y)\Rightarrow\left[\begin{matrix}x\\y\\1\\\end{matrix}\right]\]
空间点(欧式坐标→齐次坐标):\[(x,y,z)\Rightarrow\left[\begin{matrix}x\\y\\z\\1\\\end{matrix} \right]\]
图像点(齐次坐标→欧式坐标):\[\left[ \begin{matrix}x\\y\\w\\\end{matrix}\right]\Rightarrow (\frac{x}{w},\frac{y}{w})\]
空间点(齐次坐标→欧式坐标):\[\left[ \begin{matrix}x\\y\\z\\w\\\end{matrix}\right]\Rightarrow (\frac{x}{w},\frac{y}{w},\frac{z}{w})\]
注意:如果两个齐次坐标成比例,如\(p=kq\),则\(p\)和\(q\)对应的欧式坐标是相等的。
2. 相机坐标系(空间点)→像素坐标系的映射关系:
\[(x,y,z)=(fk\frac{x}{z}+{{c}_{x}},fl\frac{y}{z}+{{c}_{y}})\]
其中,\(k\)和\(l\)单位:像素/米。通常令\(\alpha =fk,\beta =fl\),单位:像素。

注意:
实际标定中,相机坐系\(x\),\(y\)轴的方向是与像素坐标系\(u\),\(v\)轴的方向(注意:此处成像平面为虚拟像平面)相同的,而像素坐标系\(u\),\(v\)轴的方向是人为规定的,一般是左上角第一个像素为坐标原点,向右为\(u\)轴正方向,向下为\(v\)轴正方向。
实际处理时都是使用虚拟像平面。虚拟像平面与像平面坐标系相比,\(x\), \(y\)轴反向。
在上图中,假设相机与物体之间存在一个虚拟像平面,则像素坐标原点一般为从左向右观察到的虚拟相平面的左上角。
设\({{P}_{h}}^{\prime }\)为像素点的齐次坐标,\({P}'\)为像素点的欧式坐标,\({{P}_{h}}\)为空间点相对于相机坐标系的齐次坐标,可以写出:\[{{P}_{h}}^{\prime }=\left[ \begin{matrix} \alpha x+{{c}_{x}}z \\ \beta y+{{c}_{y}}z \\ z \\\end{matrix} \right]=\left[ \begin{matrix} \alpha & 0 & {{c}_{x}} & 0 \\ 0 & \beta & {{c}_{y}} & 0 \\ 0 & 0 & 1 & 0 \\\end{matrix} \right]\left[ \begin{matrix} x \\ y \\ z \\ 1 \\\end{matrix} \right]=\left[ \begin{matrix} \alpha & 0 & {{c}_{x}} & 0 \\ 0 & \beta & {{c}_{y}} & 0 \\ 0 & 0 & 1 & 0 \\\end{matrix} \right]{{P}_{h}}\]
当摄像机不存在偏斜时,摄像机的投影矩阵如上。但是实际中摄像机可能偏斜,如下图所示:
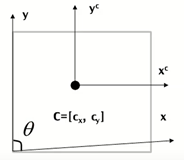
当摄像机偏斜时,摄像机的投影矩阵定义为:\[{{P}_{h}}^{\prime }=\left[ \begin{matrix} \alpha & -\alpha \cot \theta & {{c}_{x}} & 0 \\ 0 & \frac{\beta }{\sin \theta } & {{c}_{y}} & 0 \\ 0 & 0 & 1 & 0 \\\end{matrix} \right]\left[ \begin{matrix} x \\ y \\ z \\ 1 \\\end{matrix} \right]\]
由此可以定义摄像机内参数矩阵:\[K=\left[ \begin{matrix} \alpha & -\alpha \cot \theta & {{c}_{x}} \\ 0 & \frac{\beta }{\sin \theta } & {{c}_{y}} \\ 0 & 0 & 1 \\\end{matrix} \right]\]
因此,\({{P}_{h}}^{\prime }=K\left[ \begin{matrix} I & 0 \\\end{matrix} \right]{{P}_{h}}\)。
3. 规范化投影变换
\[{{P}_{h}}^{\prime }=\left[ \begin{matrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\\end{matrix} \right]\left[ \begin{matrix} x \\ y \\ z \\ 1 \\\end{matrix} \right]\]
4. 世界坐标系→像素坐标系的映射关系:
\[{{P}_{h}}^{\prime }=K\left[ \begin{matrix} I & 0 \\\end{matrix} \right]{{P}_{h}}\text{=}K\left[ \begin{matrix} I & 0 \\\end{matrix} \right]\left[ \begin{matrix} R & T \\ 0 & 1 \\\end{matrix} \right]{{P}_{w}}=K\left[ \begin{matrix} R & T \\\end{matrix} \right]{{P}_{w}}=M{{P}_{w}}\]
其中,\(K\)为相机的内参数,\(R\)和\(T\)为相机的外参数。\(K\)有5个自由度,\(R\)有3个自由度,\(T\)有三个自由度,故透视投影矩阵\(M\)有11个自由度。
5. 定理(Faugeras, 1993)
假设\(M=K\left[ \begin{matrix} R & T \\\end{matrix} \right]=\left[ \begin{matrix} KR & KT \\\end{matrix} \right]=\left[ \begin{matrix} A & b \\\end{matrix} \right]\),其中\(A=\left[ \begin{matrix} {{a}_{1}} \\ {{a}_{2}} \\ {{a}_{3}} \\\end{matrix} \right]\)。
令\(M=\left[ \begin{matrix} A & b \\\end{matrix} \right]\)为3×4的矩阵,\({{a}_{i}}^{T}(i=1,2,3)\)表示矩阵\(A\)的行,则:
- \(M\)是透视投影矩阵的一个充分必要条件是\(\text{Det}(A)\ne 0\);
- \(M\)是零倾斜透视投影矩阵的一个充分必要条件是\(\text{Det}(A)\ne 0\)且\(({{a}_{1}}\times {{a}_{3}})\cdot ({{a}_{2}}\times {{a}_{3}})=0\);
- \(M\)是零倾斜且宽高比为1(方形像素)的透视投影矩阵的一个充分必要条件是\(\text{Det}(A)\ne 0\)且:\[\left\{ \begin{align} & ({{a}_{1}}\times {{a}_{3}})\cdot ({{a}_{2}}\times {{a}_{3}})=0 \\ & ({{a}_{1}}\times {{a}_{3}})\cdot ({{a}_{1}}\times {{a}_{3}})=({{a}_{2}}\times {{a}_{3}})\cdot ({{a}_{2}}\times {{a}_{3}}) \\ \end{align} \right.\]
6. 投影变换的性质
- 点投影为点
- 线投影为线
- 近大远小
- 角度不再保持
- 平行线相交(3D世界中的平行线在图像中相交于“影消点”)
三、其他摄像机模型
1. 弱透视投影摄像机
当相对场景深度小于其与相机的距离时,可以近似认为\(z\)保持不变。
注意:
弱透视投影摄像机的透视投影矩阵\(M\)的最后一行一定是0 0 0 1。
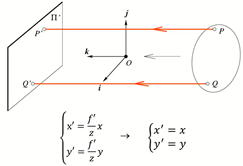
2. 正交投影摄像机
当摄像机中心到像平面的距离无限远时,空间点和像平面点的坐标呈1:1的比例关系。
3. 透视投影摄像机和正交投影摄像机的比较


4. 各种摄像机模型的应用场合
- 正交投影:更多应用在建筑设计(AutoCAD)或者工业设计行业。
- 弱透视投影:在数学方面更简单。当物体较小且较远时准确,常用于图像识别任务。
- 透视投影:对于3D到2D映射的建模更为准确。用于运动恢复结构或SLAM。
















 4412
4412











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











