







李群与李代数
视觉十四讲中讲了两个群,特殊正交群SO(3),特殊欧式群SE(3),并讲了他们的李代数so(3),se(3)。理论不一样,标识差不多,我暂且用大小写区分。还有很多不懂的地方,大家一起探讨。
基础知识
李群可以理解为是连续光滑的群。比如我们在移动,旋转过程中是一个连续变换的过程,可以将其理解为李群。
**^**符号代表反对称矩阵,即A= - A转置,对角线上元素为0,但由于都是相反数,自由度可以理解为3个自由度。简单来说如果向量a=[a1,a2,a3]的转置,a^表示一个反对称矩阵0,-a3,a2
--------------------------------————-+++++++++++ a3,0 -a1 ------------------------------------------------ +++++++++++++ - a2,a1, 0
1、李群SO(3),SE(3)【SO(3)三个自由度,表示旋转矩阵群,SE(3)是6维度,旋转加平移,变换矩阵群】

为什么引入李代数呢?
因为我们在求解位姿时,经常会构建与位姿有关的函数,然后讨论该函数关于位姿的导数,以调整当前的估计值z(在e = z − Tp中,p为空间三维的点,z为观测值,T为变换矩阵),求导数,就引入了李代数。
2、李代数so(3)

这意味着每个SO(3) 中的元素,都可以找到一个 so(3) 元素与之对应;但是可能存在多个 so(3) 中的元素,对应到同一个 SO(3)。
SO(3)与so(3)之间的映射关系,就是旋转向量与旋转矩阵之间的转换关系。
罗德里格斯公式exp(θa ∧ ) = cosθI + (1 − cosθ)aa T + sinθa ∧
3、李代数se(3)

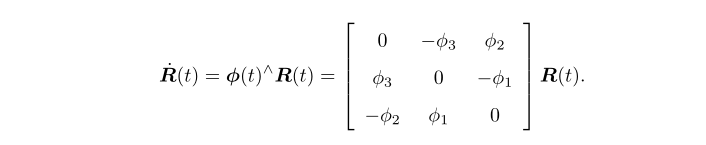
. 这张图是总述李群与李代数之间的映射关系

左边点R(t)代表R在t时刻的局部导数
下面是一些李群李代数的推导公式有两种方式,一种是直接求导,一种是利用扰动模型,推荐扰动模型的理解。(部分图片是其他博主的,如有侵权,联系我)。



















 841
841











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









