







目前实验室购买了一款F/T六维力和力矩传感器,希望借此完成机械臂的力控制,一些论文将力和位置的控制关系称之为柔顺控制。也就是说阻抗或导纳控制是柔顺控制的一种,通过调节机器人末端位置与力之间的动态特性来实现柔顺性。
阻抗控制(Impedance Control):基于内环力控制的阻抗控制,根据当前的运动状态,通过阻抗模型,决定输出的力;
导纳控制(Admittance Control):基于内环运动控制的阻抗控制,根据当前的受力状态,以及目标导纳模型,决定输出的运动
阻抗控制的特点是通过机器人末端控制器的位置或者速度和外部环境作用力之间的关系,通过调节机械臂各个关节的反馈位置误差、速度误差来达到控制外部作用力的目的。这种力控制不外乎两种基本形式一种基于位置的,另一种基于速度的。把反馈的力信号转换为位置调整量称为刚度控制;把反馈的力信号转换为速度修正量称为阻尼控制。当把反馈的力信号同时转换为位置和速度的修正量即为阻抗控制。基于内环力控制的可以认为机器人本身是一个Admittance(输入是力矩,输出是运动),而控制器是一个Impedance(输入是位置,输出是力矩)。在基于内环运动控制的阻抗控制中,机器人本身是Impedance (输入是速度,输出是对外的力),而控制器是Admittance(输入是外力,输出是运动)
机器人与外界环境之间的交互可以由质量-弹簧-阻尼系统来描述,如下图所示,
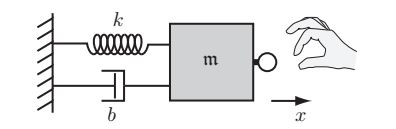
系统动力学方程为: 其中x为位移,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2614
2614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









