







苏黎世联邦理工大学开源标定工具
github链接:
https://github.com/ethz-asl/lidar_align
1 安装非线性优化库nlopt
sudo apt-get install libnlopt-dev2 编译
打开终端
mkdir -p calibration_ws/src
cd calibration_ws/src/
git clone https://github.com/ethz-asl/lidar_align.git
cd ..
catkin_make2.1 catkin_make后报错:
CMake Error at lidar_align/CMakeLists.txt:18 (find_package):
By not providing "FindNLOPT.cmake" in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by "NLOPT", but
CMake did not find one.
Could not find a package configuration file provided by "NLOPT" with any of
the following names:
NLOPTConfig.cmake
nlopt-config.cmake
Add the installation prefix of "NLOPT" to CMAKE_PREFIX_PATH or set
"NLOPT_DIR" to a directory containing one of the above files. If "NLOPT"
provides a separate development package or SDK, be sure it has been
installed.
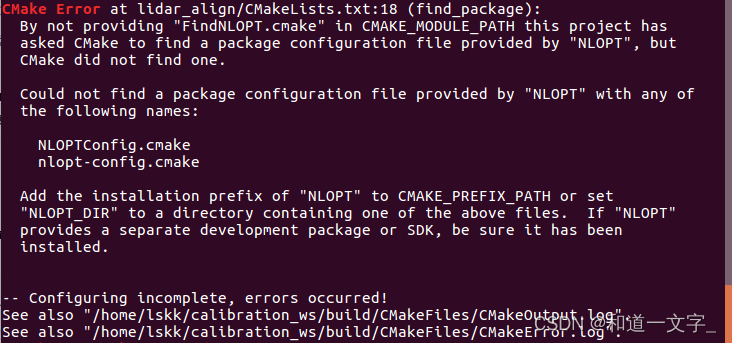
解决办法:
将/calibration_ws/src/lidar_align/NLOPTConfig.cmake文件放入/calibration_ws/src/目录下.
再打开/calibration_ws/src/lidar_align/CMakeLists.txt文件,设置路径如下:
list(APPEND CMAKE_FIND_ROOT_PATH ${PROJECT_SOURCE_DIR})
set (CMAKE_PREFIX_PATH "/usr/local/lib/cmake/nlopt")重新编译catkin_make即可通过.
3 运行
修改launch文件中的bag文件路径,再运行launch
注:bag与csv文件有一个即可;bag需包含点云话题和imu话题,且尽量在结构清晰无动态物体的室内录制;
source devel/setup.bash
roslaunch lidar_align lidar_align.launch3.1 报错:No odom message found
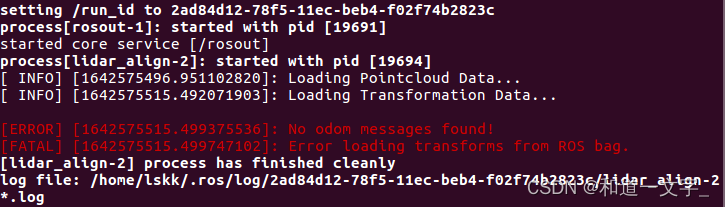
解决办法:
因为程序里只有odom的数据,没有加入imu的数据,需要修改loader.cpp中的Loader::loadTformFromROSBag(const std::string& bag_path, Odom* odom)函数.
注释掉原程序部分,加入imu数据部分代码,具体如下:
bool Loader::loadTformFromROSBag(const std::string& bag_path, Odom* odom) {
rosbag::Bag bag;
try {
bag.open(bag_path, rosbag::bagmode::Read);
} catch (rosbag::BagException e) {
ROS_ERROR_STREAM("LOADING BAG FAILED: " << e.what());
return false;
}
std::vector<std::string> types;
// 注释掉odom信息,加入imu信息
types.push_back(std::string("sensor_msgs/Imu"));
rosbag::View view(bag, rosbag::TypeQuery(types));
size_t imu_num = 0;
double shiftX=0,shiftY=0,shiftZ=0,velX=0,velY=0,velZ=0;
ros::Time time;
double timeDiff,lastShiftX,lastShiftY,lastShiftZ;
for (const rosbag::MessageInstance& m : view){
std::cout <<"Loading imu: \e[1m"<< imu_num++<<"\e[0m from ros bag"<<'\r'<< std::flush;
sensor_msgs::Imu imu=*(m.instantiate<sensor_msgs::Imu>());
Timestamp stamp = imu.header.stamp.sec * 1000000ll +imu.header.stamp.nsec / 1000ll;
if(imu_num==1){
time=imu.header.stamp;
Transform T(Transform::Translation(0,0,0),Transform::Rotation(1,0,0,0));
odom->addTransformData(stamp, T);
}
else{
timeDiff=(imu.header.stamp-time).toSec();
time=imu.header.stamp;
velX=velX+imu.linear_acceleration.x*timeDiff;
velY=velX+imu.linear_acceleration.y*timeDiff;
velZ=velZ+(imu.linear_acceleration.z-9.801)*timeDiff;
lastShiftX=shiftX;
lastShiftY=shiftY;
lastShiftZ=shiftZ;
shiftX=lastShiftX+velX*timeDiff+imu.linear_acceleration.x*timeDiff*timeDiff/2;
shiftY=lastShiftY+velY*timeDiff+imu.linear_acceleration.y*timeDiff*timeDiff/2;
shiftZ=lastShiftZ+velZ*timeDiff+(imu.linear_acceleration.z-9.801)*timeDiff*timeDiff/2;
Transform T(Transform::Translation(shiftX,shiftY,shiftZ),
Transform::Rotation(imu.orientation.w,
imu.orientation.x,
imu.orientation.y,
imu.orientation.z));
odom->addTransformData(stamp, T);
}
}
// types.push_back(std::string("geometry_msgs/TransformStamped"));
// rosbag::View view(bag, rosbag::TypeQuery(types));
// size_t tform_num = 0;
// for (const rosbag::MessageInstance& m : view) {
// std::cout << " Loading transform: \e[1m" << tform_num++
// << "\e[0m from ros bag" << '\r' << std::flush;
// geometry_msgs::TransformStamped transform_msg =
// *(m.instantiate<geometry_msgs::TransformStamped>());
// Timestamp stamp = transform_msg.header.stamp.sec * 1000000ll +
// transform_msg.header.stamp.nsec / 1000ll;
// Transform T(Transform::Translation(transform_msg.transform.translation.x,
// transform_msg.transform.translation.y,
// transform_msg.transform.translation.z),
// Transform::Rotation(transform_msg.transform.rotation.w,
// transform_msg.transform.rotation.x,
// transform_msg.transform.rotation.y,
// transform_msg.transform.rotation.z));
// odom->addTransformData(stamp, T);
// }
if (odom->empty()) {
ROS_ERROR_STREAM("No odom messages found!");
return false;
}
return true;
}3.1 再编译发现报错:sensor_msgs没有成员Imu
error: ‘Imu’ is not a member of ‘sensor_msgs’
sensor_msgs::Imu imu=*(m.instantiate<sensor_msgs::Imu>());
解决办法:
这是因为Imu消息未在头文件定义,在loader.h中加入就好.
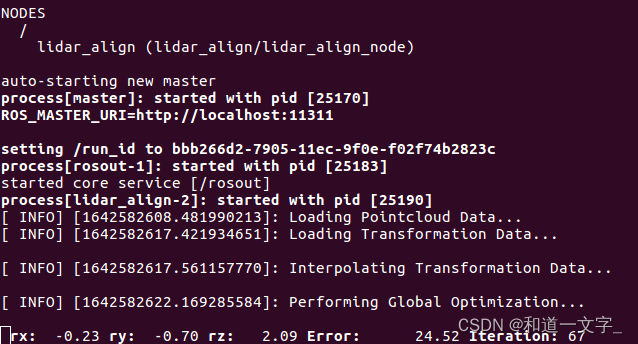
#include <sensor_msgs/Imu.h>再编译即可成功.
重新运行,如下显示,则正在标定,耐心等待即可.
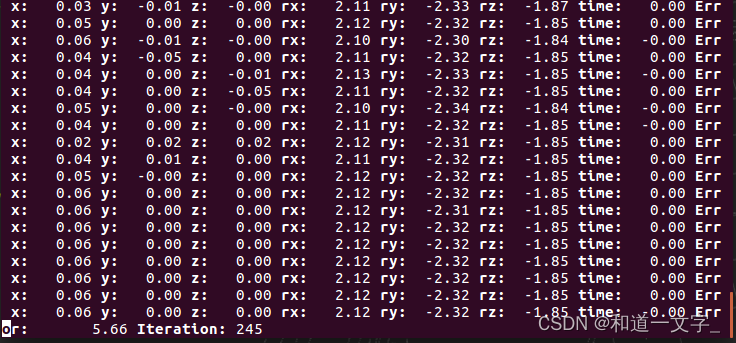
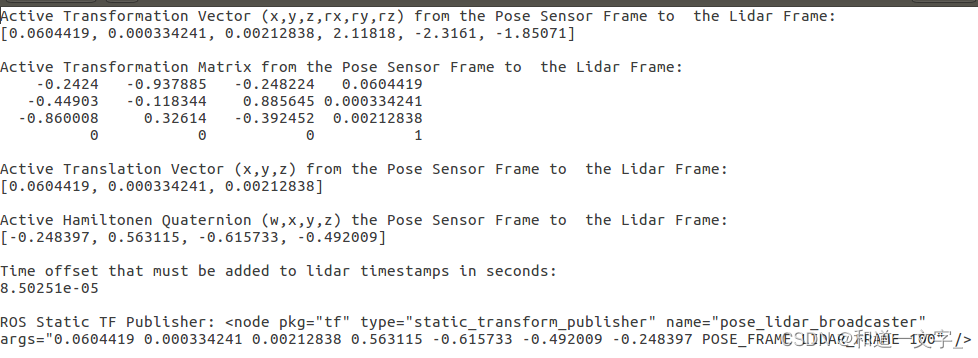
4 查看结果
接上图,加载完毕之后有:
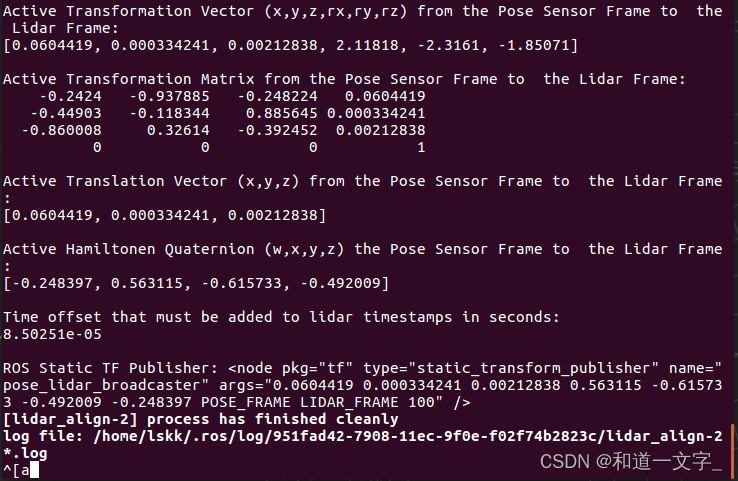
results文件中会保存标定的结果.如下:



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











