







如果发现包含的头文件ros/ros.h提示找不到,即需要配置c_cpp_properties.json文件,方法如下,
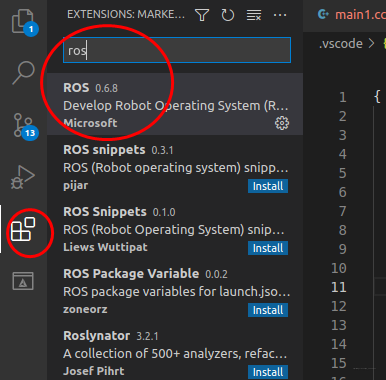
先安装ros插件,搜索ros,安装第一个即可
-
按住Fn+F1,输入C/C++,选择C/C++编辑配置(JSON),会在左边菜单中产生一个.vscode文件,文件下包含c_cpp_properties.json,单击c_cpp_properties.json文件,
-
或者快捷键ctrl+shift+P: 也可以找到c_cpp_properties.json,
-
初始界面如下
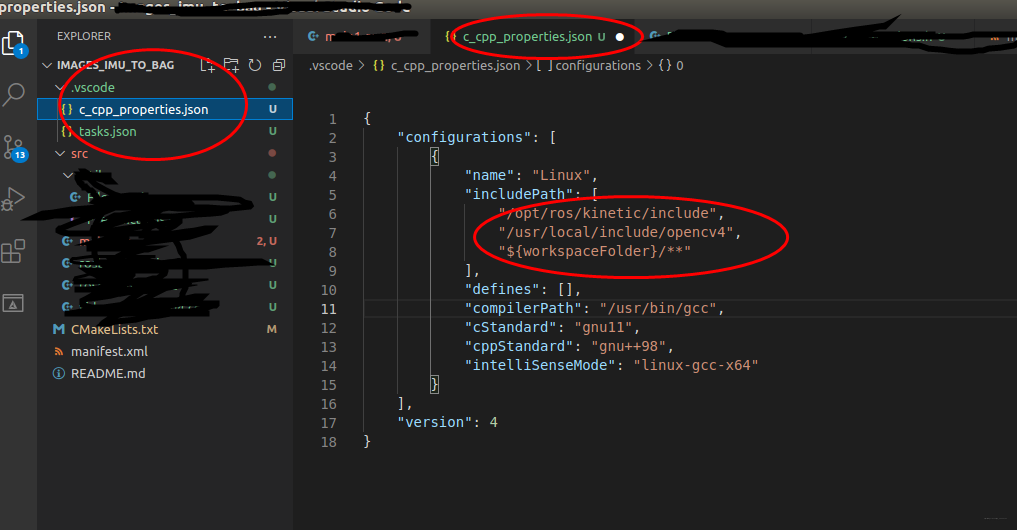
- 然后编辑该 文件的 “includePath”: ,增加下面两行,注意逗号,根据自己的ros版本目录修改,以及opencv目录。
"/opt/ros/kinetic/include",
"/usr/local/include/opencv4",















 9276
9276











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









