







Ubuntu20.04安装Navigation功能包
1、在用户目录下(~/)创建工作空间目录:nevigation_ws/src;
cd ~/
mkdir -p nevigation/src
2、进入到~/nevigation/src目录下,下载navigation功能包(下载地址:https://github.com/ros-planning/navigation.git);
cd ~/nevigation/src
git clone https://github.com/ros-planning/navigation.git
3、安装依赖;
sudo apt-get install ros-noetic-navigation*
sudo apt-get install ros-noetic-pointcloud-to-laserscan
4、编译:在~/nevigation目录下,执行catkin_make;
cd ~/nevigation
catkin_make
5、编译成功。
执行编译后可能会报的错误:
1、Could NOT find Bullet (missing: BULLET_DYNAMICS_LIBRARY BULLET_COLLISION_LIBRARY BULLET_MATH_LIBRARY BULLET_SOFTBODY_LIBRARY BULLET_INCLUDE_DIR)

解决方法:
sudo apt-get install ros-noetic-navigation*
2、Could NOT find Bullet SDL
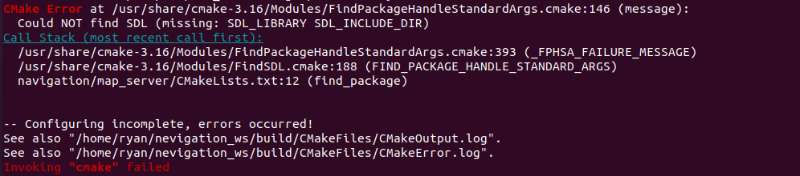
解决方法:
sudo apt-get install ros-noetic-navigation*
3、报错
Could not find a package configuration file provided by "tf2_sensor_msgs"
with any of the following names:
tf2_sensor_msgsConfig.cmake
tf2_sensor_msgs-config.cmake

解决方法:
sudo apt-get install ros-noetic-pointcloud-to-laserscan

















 563
563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









