









 这篇教程详细介绍了ROS 2导航堆栈,包括如何帮助移动机器人在已知环境中安全导航。涵盖从ROS基础知识到构建工业应用,以及多机器人协作和使用强化学习的项目。
这篇教程详细介绍了ROS 2导航堆栈,包括如何帮助移动机器人在已知环境中安全导航。涵盖从ROS基础知识到构建工业应用,以及多机器人协作和使用强化学习的项目。
The Ultimate Guide to the ROS 2 Navigation Stack
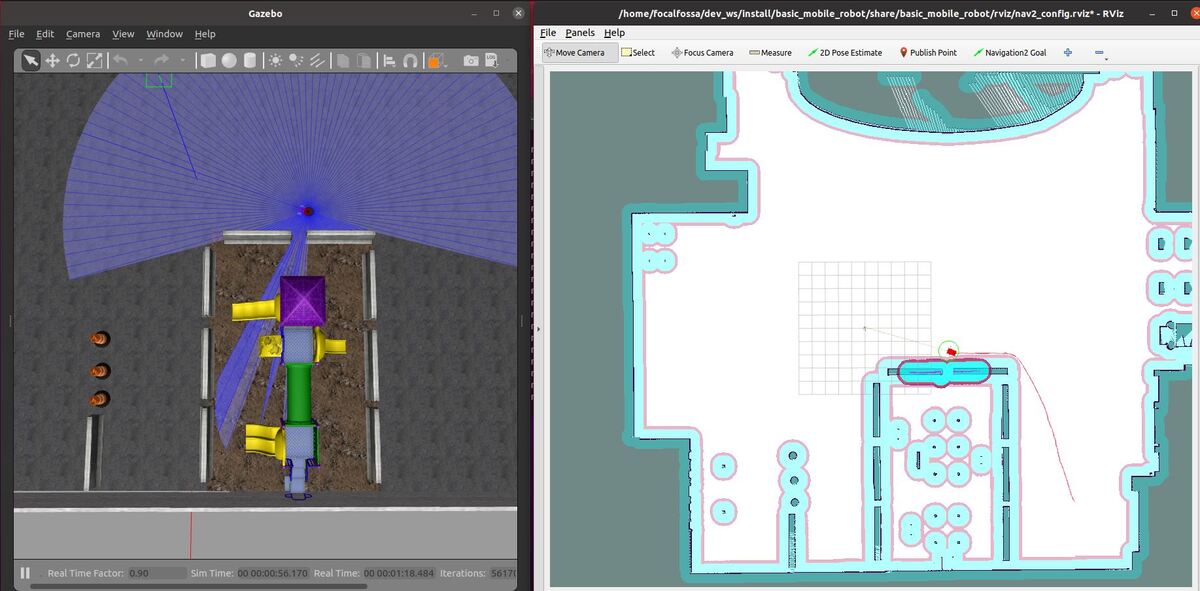
在下面的教程中,我们将逐步详细介绍 ROS 2 导航堆栈(也称为 Nav2)。 ROS 2 导航堆栈是软件包的集合,您可以使用它来帮助您的移动机器人安全地从起始位置移动到目标位置。这是我们的最终输出:使用地图在已知环境中导航
- 第 1 章“ROS 入门”是针对初学者的 ROS 基本介绍章节:本章将帮助您了解 ROS 软件框架及其概念。
- 第 2 章,ROS-2 简介及其功能,向您介绍 ROS-2:最新升级的框架,可帮助我们在实时应用程序中使用 ROS。本章的组织方式与第 1 章类似,以便用户能够区分两个 ROS 版本并了解它们的功能和限制。
- 第 3 章,构建工业移动机械手,您将能够构建移动机器人、机械臂,并将它们组合起来在虚拟环境中使用并通过 ROS 控制它们。
- 第 4 章,使用状态机处理复杂的机器人任务,向您介绍 ROS 中的技术,这些技术可以在使用机器人进行连续和复杂的任务管理时进行调整。
- 第 5

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2936
2936

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











