







IMU内参标定以及初始化(绕8字)
注意事项: 因为三个方向的姿态信息由磁力计输出,所以采集车周围不能有铁之类的物体,不然会产生干扰
针对IMU(捷联惯导)的输出量作一些解释:
IMU本身定义了一个传感器坐标系(IMU自身的坐标系),一般我们会将IMU或者惯导模块固连在载体上,符合右手系的载体系定义,一般常见的有前右下或者右前上等。在仿真算法中,简化处理就是 将IMU的输出考虑在载体系(body系,b系) 了,实际需要考虑IMU坐标系和载体系的安装关系。
参考文章:基于IMU的位姿估计(一)——惯性传感器
一、IMU内参标定
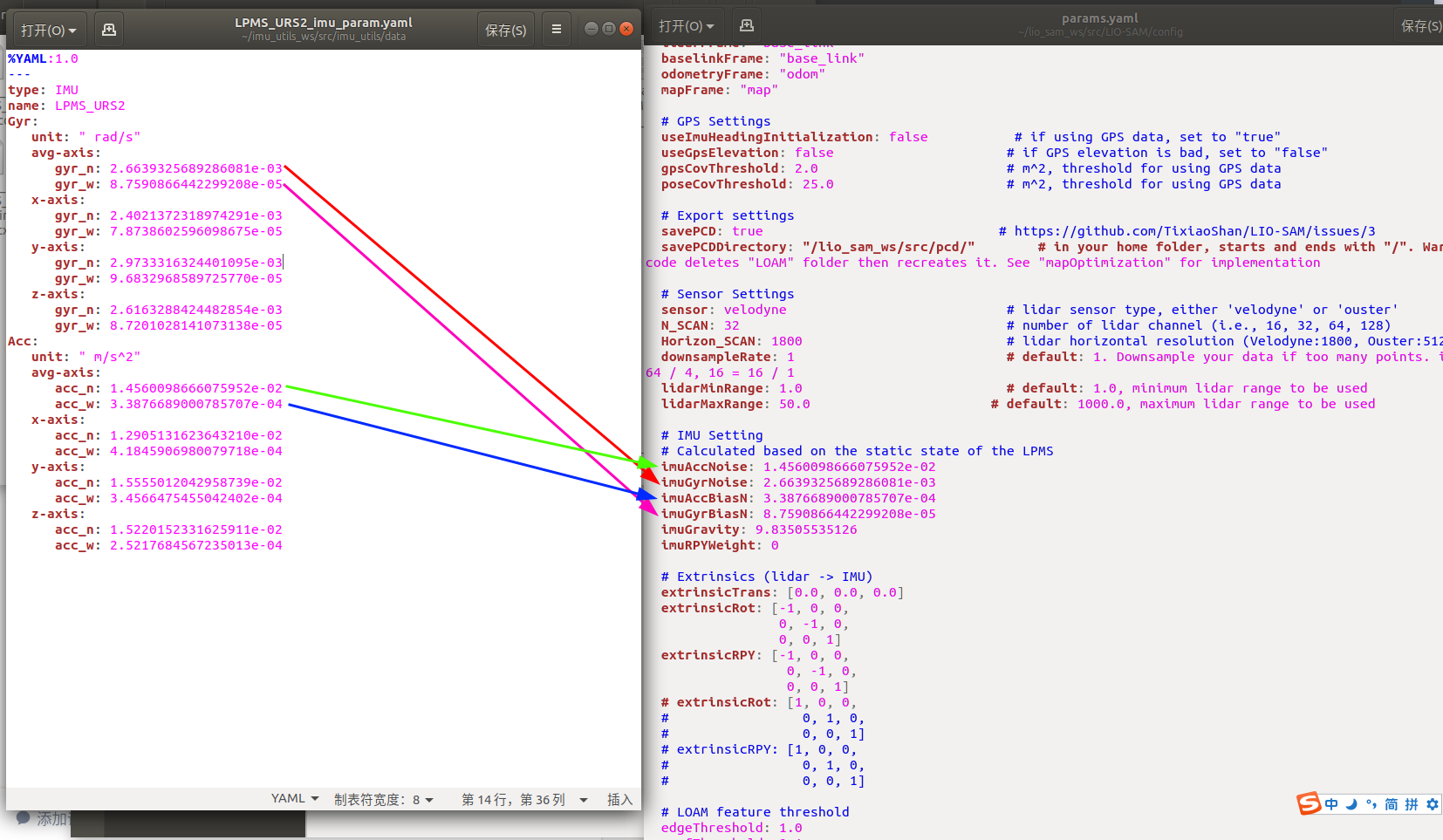
1、6轴(角速度+线加速度)信息初始化(标定噪声和bias)
使用imu_utils工具标定,对应博客:Ubuntu20.04编译并运行imu_utils,并且标定IMU。
2、三轴姿态信息初始化(绕8子)
参考大佬:
1、从零开始手写VIO 第二章 IMU传感器、详细照片
2、LIO-SAM运行自己数据包遇到的问题解决–SLAM不学无数术小问题
二、IMU模块ROS配置
参考大佬:
1、如何在 Ubuntu 上配置 ROS和LPMS IMU传感器















 373
373

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言










{kind=link}