







写毕业论文的时候涉及到realsense d435i 相机的成像原理,一番查找之后和对比之后,得出以下结论。
首先看一下这款相机的构造: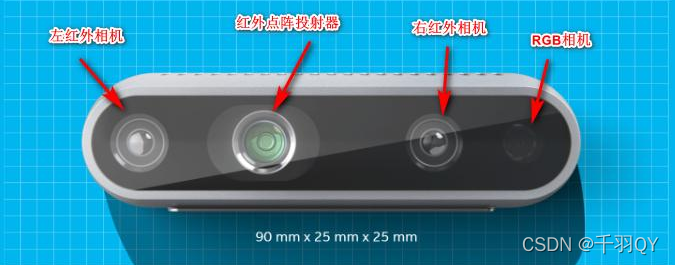
图片来自:https://blog.csdn.net/lemonxiaoxiao/article/details/109297834
1、彩色图像成像原理
RGB相机的单目针孔模型,图像如下:
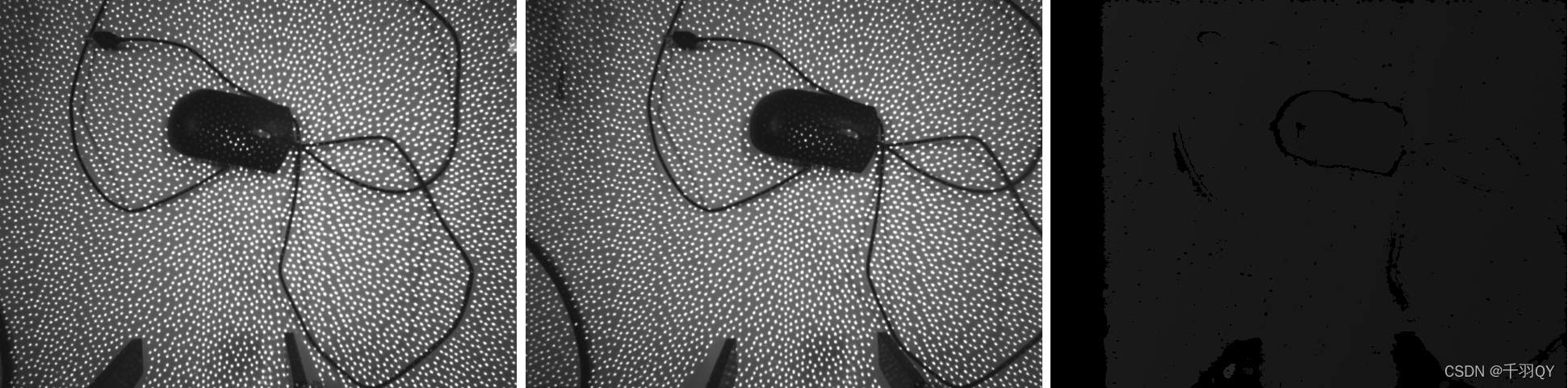
2、深度图像成像原理
基于左右红外相机的图像,采用三角测量法计算。由于某些场景中特征点较少,所以通过红外点阵投射器向场景中发射红外点阵图案(人眼看不到,红外相机可以拍摄到),增加特征点,提高成像效果。
ROS中发布的深度图像是与图中的右红外相机对齐的,左红外、右红外、深度图分别如下图所示:
另外,realsense-ROS发布了左红外、右红外、深度图、彩色相机的内参,以及与彩色图对齐的深度图的内参:
1、右红外相机参数
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 0.0, 1.0, 0.0]
2、左红外相机参数
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [378.98150634765625, 0.0, 318.2408447265625, 18.91739845275879, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 0.0, 1.0, 0.0]
3、深度图像参数
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [378.98150634765625, 0.0, 318.2408447265625, 0.0, 0.0, 378.98150634765625, 241.04586791992188, 0.0, 0.0, 0.0, 1.0, 0.0]
4、彩色相机参数
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 0.0, 1.0, 0.0]
5、深度对齐彩色图的参数
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [613.4265747070312, 0.0, 329.3377990722656, 0.0, 0.0, 613.5404663085938, 243.68722534179688, 0.0, 0.0, 0.0, 1.0, 0.0]可以看出,深度图像的参数与右红外相机的参数是一样的,也可以证明深度图像与右红外相机对齐。另外,与彩色图对齐的深度图的参数与彩色相机的参数一样。
值得注意的是,ROS中也发布了深度图像分别到彩色相机、左红外、右红外的外参:
6、depth->color 外参
rotation: [0.9999861717224121, 0.0002028869348578155, -0.005260064732283354, -0.0001973225735127926, 0.9999994039535522, 0.0010583496186882257, 0.005260276608169079, -0.0010572969913482666, 0.9999856352806091]
translation: [0.014868799597024918, -3.15127799694892e-05, 0.0001727673807181418]
7、depth->右红外 外参
rotation: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
translation: [0.0, 0.0, 0.0]
8、depth->左红外 外参
rotation: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
translation: [0.0, 0.0, 0.0]深度图到彩色相机的外参没有问题,但是到两个红外相机的外参却相同,按照上面的结论,深度图到右红外的外参是单位旋转矩阵+0平移,但是到左红外的外参应该不是0平移(没想清楚为什么这样)。

















 831
831

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









