







Github地址:https://github.com/google-research/motion_imitation
项目网页:Learning Agile Robotic Locomotion Skills by Imitating Animals
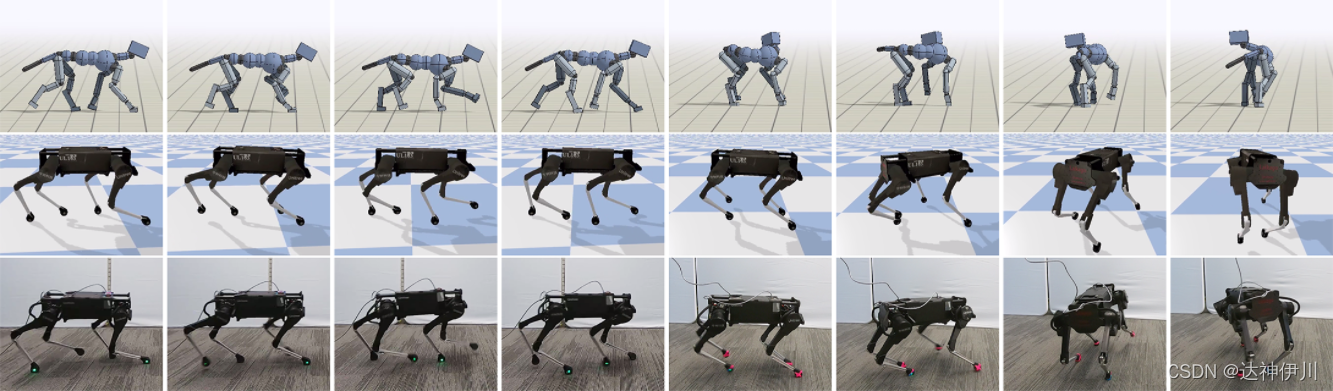
据悉,其中四足机器人的MPC用到了MIT的cheetah3上的算法,相关文章为《Dynamic Locomotion in the MIT Cheetah 3 Through Convex Model-Predictive Control》。
接下来说下Google团队复现的代码。
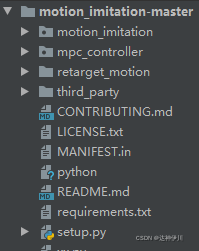
其中MPC涉及到的就mpc_controller和third_party两个文件夹。
安装MPC环境:
pip3 install -r requirements.txt
p 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 706
706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









