







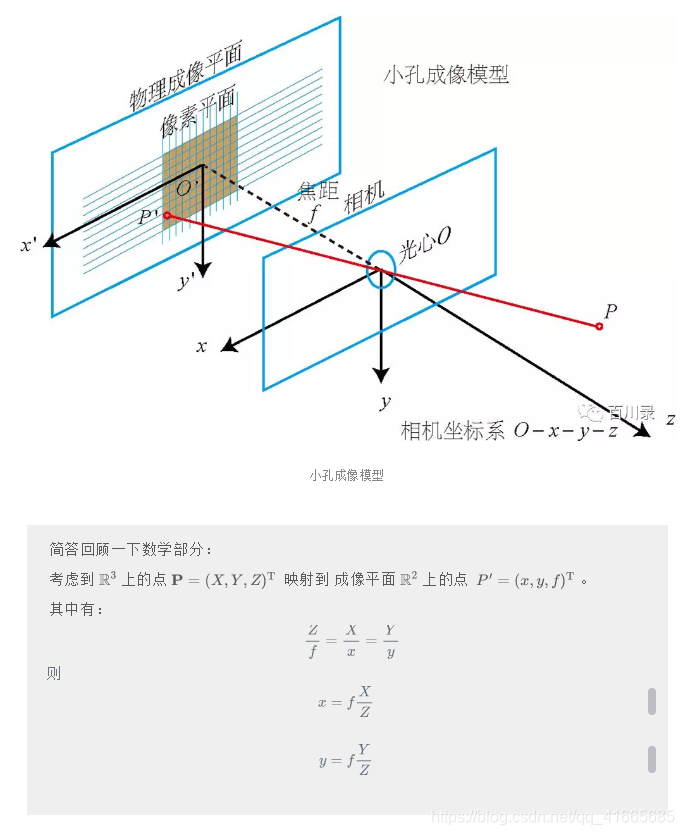
以上回顾下这个数学模型。
原来是这么回事。。。

疑问暂时明白点了。
补充下FoV如何计算?想一想。
焦距与成像效果的关系?想一想。
光圈与曝光时间的关系?想一想。
光圈过大或者过小有什么影像?想一想。
焦距既影响Fov,又影响透视效果。
什么是透视效果?什么情况下透视效果强?什么时候弱?想想无穷远相机。
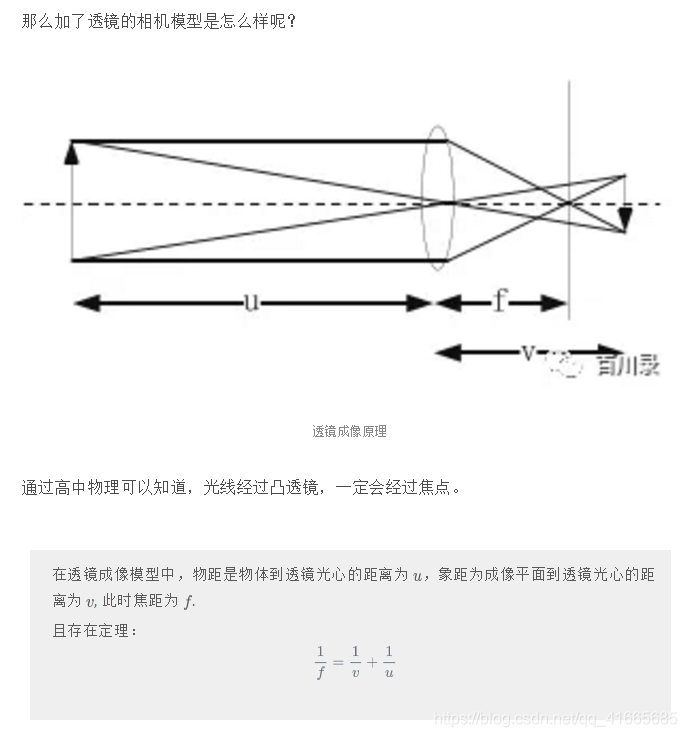
小孔成像能量不足,所以用透镜聚光。
透镜呢,有一个对应的焦距f。
物理上,f与光的波长有关。
自然光有不同的波段(波长)。
比如白光通过透镜,不同颜色的光焦距不同。仔细想想这种场景。
镜头畸变:径向畸变,切向畸变。去畸变很重要。
径向畸变原因?切向畸变的原因?
两层LCD利用针孔模型早就不连续的视场角。想一想怎么做?interesting!!!

















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









